英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
叶片长度和自动测量
使用W波段微多普勒雷达的无人机旋转速率
阿希什·库马尔·辛格和金永勋,IEEE成员
摘要— 对于目标的分类,应利用其他人没有的目标的不同特征。在无人机作为目标的情况下,分类需要输入参数,例如刀片数、刀片长度、帧大小和每秒旋转 (RPS)。本文介绍了一种使用微多普勒签名自动计算刀片长度和RPS的算法。我们使用时频域来分析接收信号和微多普勒频率与时间的变化,从而与刀片长度和RPS有关。为了实验目的,使用设计设计的变送器、低噪声前端和下变频器的低损耗高增益模块开发W波段同音微多普勒雷达。发射机输出功率为25 dBm,前端增益为51 dB,带宽为4GHz带宽,下变频器的转换损耗为plusmn;12 dB。通过分析单转子、双转子和四转子外壳的实验数据,对拟建算法进行了验证,利用W波段多普勒雷达估计叶片长度的平均误差为1.3%(最大误差6.1%)。
索引术语- 微多普勒签名,时间频率分析,多普勒雷达,雷达信号处理,W波段。
第一节
介绍
诸如振动或目标身体部位旋转之类的微运动可能会在雷达接收信号上引入频率调制,这被称为微多普勒频率调制。微多普勒频率可能会围绕由主体部分[1]的移动所定义的中心多普勒频率偏移。例如,在人的情况下,中央多普勒频率是由于全身的运动引起的。然而,微多普勒频率对应于手和腿的运动[2]。在无人机的情况下,微多普勒频率可以归因于每个单独的叶片和/或归因于无人机的旋转。
近年来,人们为分析微多普勒做出了很多努力,以进行目标识别和分类,以用于不同的应用,例如人步行[2] – [3] [4],直升机[5],[6],风力涡轮机[ 7],[8]等。许多研究人员只专注于基于仿真的分析[9],[10]; 但是,由于存在噪声,来自相邻叶片的干扰,叶片的雷达截面复杂性以及叶片的非理想运动,这些方法在实际情况下可能无法提供合理的结果。有一些工作着重于使用复杂的雷达系统(例如多个单静态雷达[11]和多静态雷达系统[12])估算转子参数。在这项工作中,我们专注于使用单个单静态雷达系统自动测量转子叶片的叶片长度和转速。
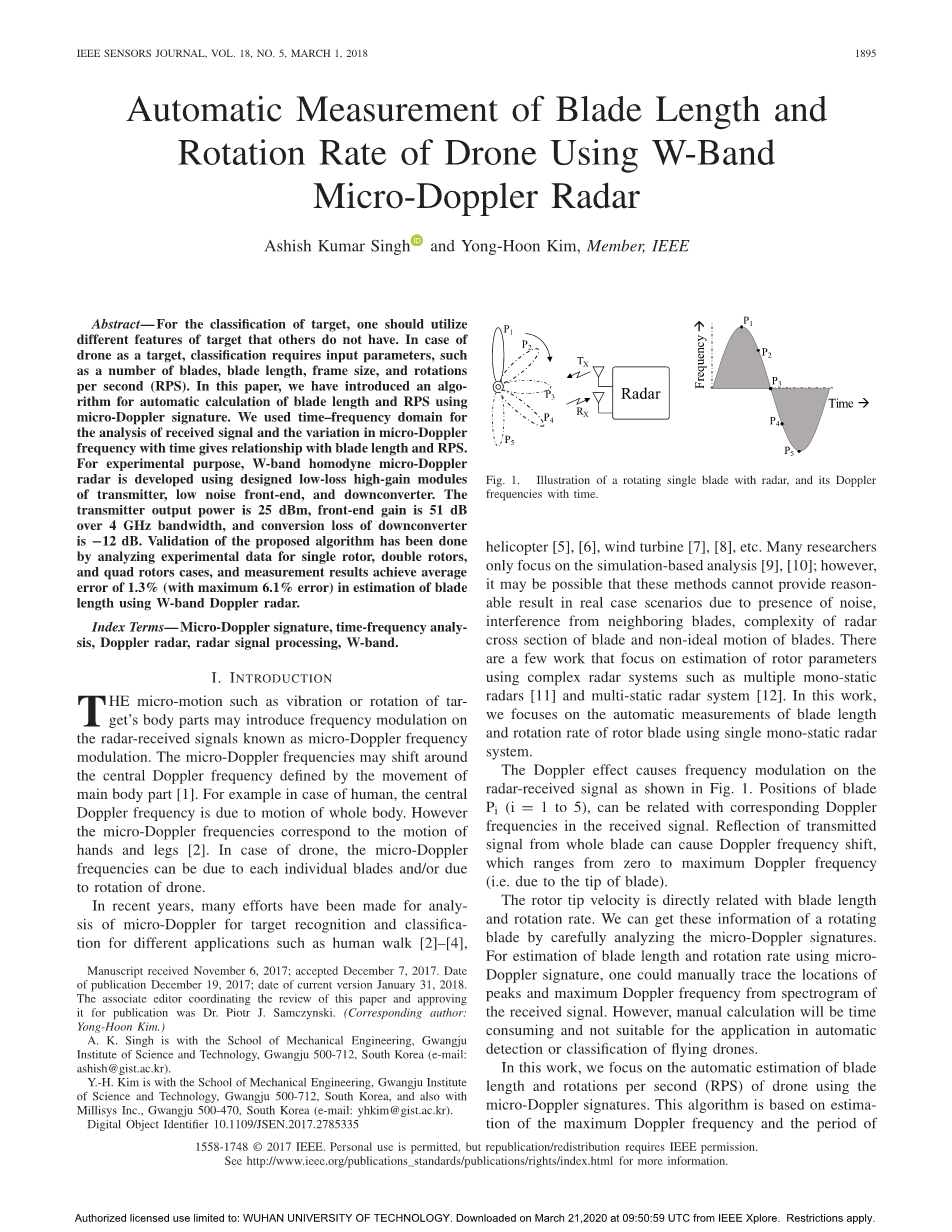
如图1所示,多普勒效应对雷达接收信号进行频率调制。刀片的位置P一世 (我= 1 至5),可以与接收信号中的相应多普勒频率相关。从整个叶片反射的发射信号会引起多普勒频移,该频移的范围从零到最大多普勒频率(即由于叶片尖端)。
图1.带有雷达的旋转单刀片的插图,以及其多普勒频率随时间的显示。
转子叶尖速度与叶片长度和转速直接相关。通过仔细分析微多普勒信号,我们可以获得旋转刀片的这些信息。为了使用微多普勒信号估计叶片长度和旋转速率,可以从接收信号的频谱图中手动跟踪峰的位置和最大多普勒频率。但是,手动计算将很耗时,并且不适合用于自动检测或对飞行无人机进行分类。
在这项工作中,我们专注于使用微多普勒签名自动估计无人机的叶片长度和每秒旋转数(RPS)。该算法基于对雷达接收信号中最大多普勒频率和多普勒频率周期的估计。我们已经使用我们开发的W波段多普勒雷达通过实验结果验证了该算法[13]。
本文的其余部分结构如下:第二部分介绍了我们的W波段微多普勒雷达系统。第三部分介绍了使用微多普勒信号自动测量叶片长度和转速的方法。第四节给出了测量和分析。最后,第五节总结了本文提出的工作。
第二节
W波段微多普勒雷达
为了测量无人机叶片的长度和转速,开发了紧凑型微多普勒雷达,如图2所示,它被设计为零差收发器。该雷达包括一个由倍频器和一个输出放大器组成的发射器,一个由两级低噪声放大器和一个带通滤波器组成的接收器前端以及一个用于LO和混频器下变频器的放大器。由于MMIC芯片是以裸芯片状态提供的,由于W波段的性能下降和寄生效应,该状态未封装。
图2. W波段微多普勒雷达框图。
MMIC芯片用于设计收发器模块,以最大程度地减少损耗并防止寄生现象。每个模块的以下子节介绍了设计细节。
A. MMIC发送器模块
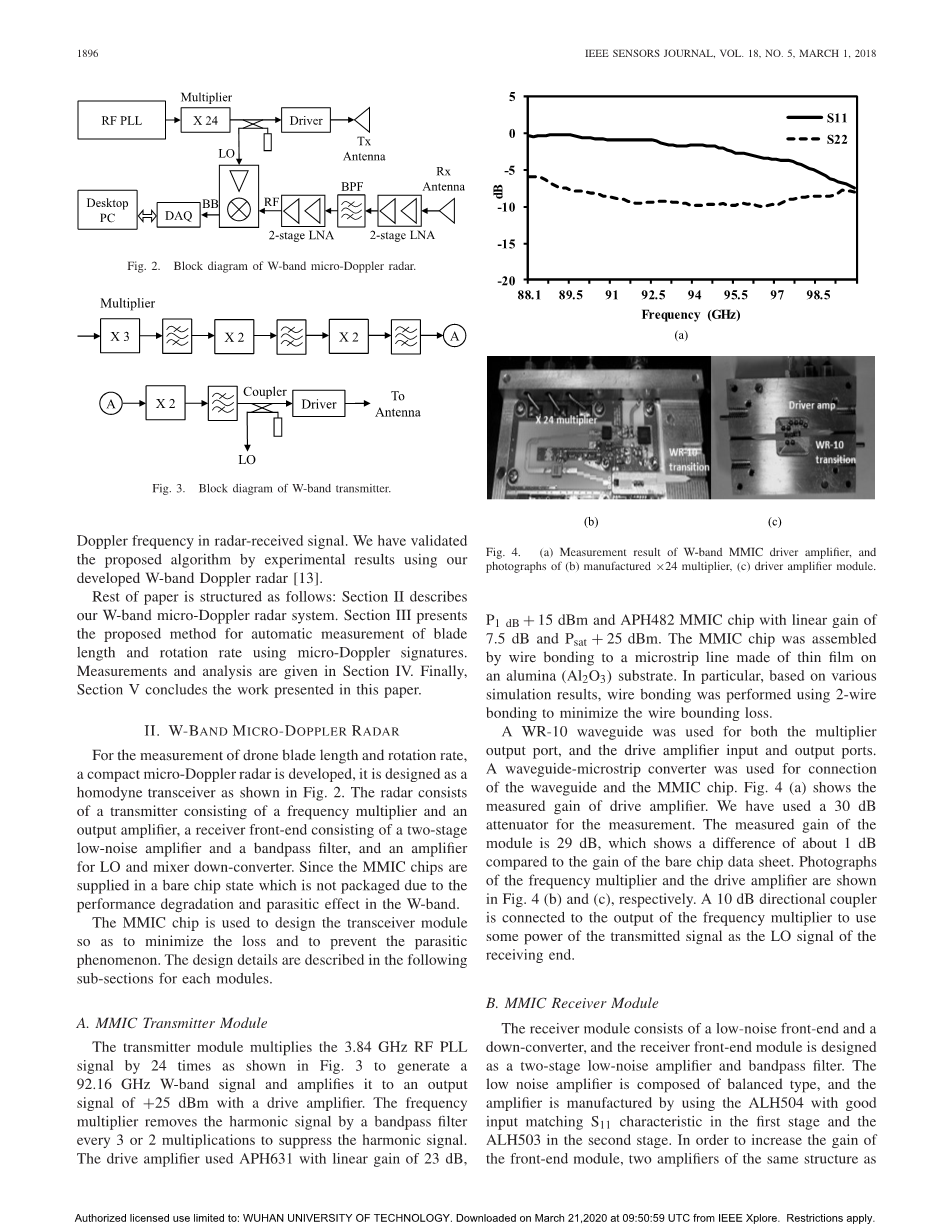
发射器模块将3.84 GHz RF PLL信号乘以24,如图3所示,以生成92.16 GHz W波段信号,并通过驱动放大器将其放大为 25 dBm的输出信号。倍频器每隔3或2倍通过带通滤波器去除一次谐波信号,以抑制该谐波信号。驱动放大器使用APH631,线性增益为23 dB,P1个d 乙 15 dBm和APH482 MMIC芯片,具有7.5 dB的线性增益和 P小号一个牛逼 25 dBm的 通过在铝(Al 2 O 3)基板上通过引线键合到由薄膜制成的微带线来组装MMIC芯片。特别地,基于各种模拟结果,使用2-线键合来进行线键合以最小化线键合损耗。
图3. W波段发射机的框图。
乘法器输出端口以及驱动放大器输入和输出端口均使用WR-10波导。波导微带线转换器用于波导和MMIC芯片的连接。图4(a)显示了驱动放大器的测量增益。我们已使用30 dB衰减器进行测量。模块的测量增益为29 dB,与裸芯片数据手册的增益相比,相差约1 dB。图4(b)和(c)分别显示了倍频器和驱动放大器的照片。一个10 dB定向耦合器连接到倍频器的输出,以使用发射信号的某些功率作为接收端的LO信号。
图4.(a)W波段MMIC驱动放大器的测量结果,以及制造的(b)的照片 times; 24 乘法器,(c)驱动器放大器模块。
B. MMIC接收器模块
接收器模块由一个低噪声前端和一个下变频器组成,接收器前端模块设计为两级低噪声放大器和带通滤波器。低噪声放大器由平衡型组成,并且该放大器是使用具有良好输入匹配S AL 11的ALH504制造的第一阶段的特性和第二阶段的ALH503。为了增加前端模块的增益,连接了与两级放大器结构相同的两个放大器,并使用带通滤波器来衰减两个放大器之间的噪声。该滤波器被设计为并联耦合线带通滤波器。包括带通滤波器在内的前端增益约为51 dB,测得的输入和输出回波损耗平均小于-15 dB。芯片的噪声系数约为5 dB。制成的四级放大器和带通滤波器的前端部分如图5所示。
图5.(a)框图和(b)W波段接收机前端模块的照片。
C. MMIC下变频器模块
为了将W波段频率转换为能够进行信号处理的基带频率,频率下变频器被设计为将发射信号与接收信号直接混合。图6显示了W波段MMIC下变频器模块的照片。MMIC芯片是使用单平衡MBH100设计的,转换损耗为11.5 dB,IF中频的工作频率为DC至3 GHz。
图6.W波段MMIC下变频器模块的照片
混合物的LO泵浦功率要求为 10 dBm。因此,出于两个原因使用了放大器,一个原因是为了改善LO级,另一个原因是为了增强LO-RF隔离。在整个带宽上测得的RF到IF的转换损耗约为12 dB,这几乎与裸芯片数据表的11.5 dB转换损耗相同,相差约0.5 dB。使用DAQ,将下变频后的基带信号存储在PC中,以分析微多普勒信号。NI-DAQ 6259 USB已用于以1.25 MSPS的采样率进行数据采集,并在信号分析之前使用了数字带通滤波器(100 Hz – 40 KHz)。
第三节
拟议方法
我们分析了时频域中的微多普勒签名,以估计叶片长度和无人机的RPS。所提出的方法的处理流程图如图7所示。
图7.提出的RPS和叶片长度测量方法的处理流程图
让, s (n ) 是基带返回信号的采样数据 s (吨) 转子叶片的距离为[1]
s (t )=大号sdot; Euml; X p { - Ĵ 4 pi;lambda;[ R0 z0罪beta;] }·&Σntilde;bminus; 1k = 0Egrave; X p { - Ĵ phi;ķ(吨) }sdot;scaron;我Ntilde;Ccedil;{phi;ķ(t ) }(1)
其中,相位函数是:
phi;ķ(t )=4个pi;lambda;大号2cosbeta;cos(Omega; 吨 phi;0 ķ 2 pi;/ Nb)ķ = 0 ,1 ,2 ,... ,Ntilde;b-1 ,(2)
哪里, ntilde;b 是光头的数量, [R0 是雷达到转子的距离, lambda; 是发射信号的波长, 大号 是叶片的长度, phi;0 是的初始旋转角度 t = 0 , beta; 是仰角 ž0 是转子叶片的高度, Omega; 是叶片的角旋转速率。因此,多普勒频率也与叶片的长度和叶片的旋转有关。在本例中,我们使用了两个刀片(ntilde;b= 2 )的四轴飞行器进行实验。由于每个转子都有两个叶片,因此相位函数将是两个正弦函数的组合,其中pi; 相位差。但是,接收信号中的多普勒频移总体是所有四个转子的结果。首先,我们必须估算最大多普勒频率F中号一个X 在接收到的雷达信号中。为此,采样的接收信号s (n ) 带通滤波以去除位于零多普勒频率附近的接收信号的高能分量。让x (n ) 是带通滤波后的信号 s (n ) 可以在频域中表示为:
XF(k )= sum;n = 1ntilde;x (n )e- Ĵ (2 pi;/ N) ķ Ntilde;,1 le; ķ le; Ntilde;(3)
哪里 ntilde; 是数据样本的长度。我们确定了信封Euml;(k ) 使用MATLAB函数[16]来确定输入光谱,该函数基于局部最大值上的样条插值。在我们的案例中,我们使用了150个采样间隔内输入光谱的峰包络。衍生物D (k ) 信封的 Euml;(k ) 可以表示为:
D (k )= E(k )minus; E(k minus; 1),1 le; ķ le; Ntilde;(4)
导数 D (k ) 用于估计反射信号和本底噪声的功率水平相差很大的频率位置。导数的最小值将为我们提供包络线最陡峭的负斜率的位置[14],它将代表最大的多普勒频率F中号一个X 在给定的接收信号中
F中号一个X= 一个ř 克 中号我Ntilde;F[ D (k ) ](5)
估计的准确性 F中号一个X 取决于输入信号的SNR和输入频谱功率域中的尖峰。但是,使用中值滤波器,可以在确定输入频谱的包络线时简单地消除这些尖峰。
最大多普勒频移对应于叶片长度,因为当入射光线垂直于叶片时,旋转叶片的尖端具有最大速度。通常,高速旋转的叶片的多普勒频移比无人机主体(即机架)的多普勒频移大得多。在我们的案例中,我们使用带有旋转叶片的固定无人机进行了室内实验。我们使用短时傅立叶变换(STFT)方法表示输入信号的微多普勒签名(频谱图)。带通滤波后的基带信号x (n ) 可以使用带有参数时间的STFT方法在时频域中表示 ntilde; 和频率 ķ 如:
X(n ,k) =sum;中号m = 1X (米 Ntilde;) sdot; 瓦特(米)Euml;- Ĵ (2 pi;/ K) ķ 米,1 le; ķ le; ķ,ķge; 中号(6)
哪里 宽(米) 是长度的窗函数 中号 和 ķ 是计算加窗序列的DFT的采样点数。
使用频谱图的功率谱密度(PSD)给出为
P(n ,k) =2 ·&| X(n ,k) |2Fs·&Σ我= 1中号w2一世,ķ = 1 ,2 ,... ,ķ/ 2;1 le; Ntilde; le; Ntilde;,(7)
哪里 Fs 是采样频率, ntilde; 是输入信号中的样本总数。
为了计算旋转叶片的RPS,需要确定微多普勒信号的连续峰值之间的持续时间。为了定位这些峰值,我们需要跟踪频谱图的频率模式。中频F米Egrave; d(n ) 是随时间变化的频率轨迹,它将功率谱分为两个相等大小的部分[15],可以表示为
sum;ķ = ˚F1个F米Egrave; d(n )P(n ,k) ==sum;ķ = ˚F米Egrave; d(n )F2P(n ,k)1个2sum;ķ = ˚F1个F2P(n ,k),1 le; Ntilde; le; Ntilde;,(8)
从该频率开始计算频段的中值频率 F1个(= f中号一个X- Delta; ˚F) 至 F2(= f中号一个X Delta; ˚F) 。 Delta; ˚F 也是用于计算中值频率的输入参数。在这里,频段(2 ·Δ ˚F )已被用来避免接收信号的低频成分。因为,我们的目标是仅追踪微多普勒信号中的峰。另外,由于无人机主体的反射,拍子信号中存在高功率低频分量。
中频 F米Egrave; d(n ) 作为时间的函数,可以有多个峰值。这些峰值对应于接收信号的微多普勒信号中存在的周期性微多普勒频率的局部最大值。因此高峰Fp(n ) 与多普勒频率的周期有关,可以计算为
Fp(n )= m a x(f米Egrave; d(Ntilde; )sdot; 瓦特p(n ))(9)
哪里 wp(n ) 是用于选择峰的矩形窗口。山峰Fp(n ) 仅用于确定时刻 ntilde; ,出现峰值。这些峰值不等于最大多普勒频率F中号一个X 。
每个窗口只有一个峰,因此,峰的总数等于窗口数 中号 。窗口大小取决于目标的类型(例如两叶片或三叶片转子)以及转子的旋转速度。我们已使用200毫秒样本大小进行数据分析。峰值检测窗口的大小为14 ms,噪声阈值水平为-110 dB。所选峰可能出现在偶数或奇数位置。对应于每个峰值的时间将提供有关叶片旋转的信息。
选择峰值检测技术及其
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238855],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

