
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊控制的温室温度控制
Revathi S*, Sivakumaran N**
仪表及控制工程部 邮箱:revathisoundiran@gmail.com
**仪表及控制工程部 邮箱:nsk@nitt.edu
印度泰米尔纳德邦蒂鲁奇拉帕利国家技术研究所。
摘要:这些温室应该为植物生产提供充足的阳光、温度和湿度的可控环境。温室中较好的生长条件主要是通过保持较高的内部环境温度而不是外部温度来实现的。因此,对温室加热器的要求取决于结构散热量的大小。该方案利用智能控制器测量温室内温度的在线序列数据,并根据温室基本空气量的能量平衡,递归地更新加热功率。温室动力学仿真结果表明了:在没有精确的植物数学模型条件下,该方案的有效性。
2016,IFAC(国际自动控制联合会)由爱思唯尔有限公司主办。版权所有。
关键词:温室、模糊逻辑控制器、热损失、温度控制、加热功率、粒子群算法。
1.前言
温室栽培基本上是为了保护种植园不受恶劣天气的影响,近年来已成为实现农业生产控制的一种手段。近年来,温室气候环境的控制引起了人们的广泛关注。引起这种兴趣增长的主要原因与下列农学和财政的目标有关:(a)延长生长季节和潜在产量;(b)管理气候以达到更高的质量标准;(c)开发低成本生产系统,以适应资源稀缺和种植者投资能力低。气候控制问题的主要目的是使温室内的温度保持在适当的范围内。困难在于影响理想环境的各种现象的复杂性,基本上取决于昼夜周期、生长季节、当地气候和文化的性质。(Bakker J C et al.,1995).
2.加热
许多温室必须进行加热才能全年生产。良好的供暖系统是植物生产成功的重要步骤之一。任何加热系统若能提供统一的温度控制而不释放对植物有害的物质是可以接受的。合适能量来源包括天然气、低压气体、燃料油、木材和电力。这些来源的成本和可用性在不同地区有所不同。便捷性、投资和运营成本都是需要进一步考虑的因素。劳动力的节省可以证明更昂贵的自动控制供暖系统是合理的。温室的供热需求取决于建筑结构散热量的大小。温室的热损失通常以三种传热方式发生:传导、对流和辐射。通常许多类型的热交换是同时进行的。
2.1传导
热通过物质或物体之间的直接物理接触来传导。两个物体之间的传导速度取决于面积、路径长度、温差和物质的物理性质(如密度)。通过用不良导热体(绝缘体)代替快速导热的材料或者在热流路径上放置绝缘体,最容易减少传导导热。
2.2对流
对流换热是温热气体或液体向较冷地点的物理运动。温室内的对流热损失通过通风和渗透(风扇和空气泄漏)发生。
2.3辐射
辐射传热发生在两个物体之间,没有直接接触,也不需要空气等介质。和光一样,热辐射沿直线运动,在撞击物体时热辐射或反射、或传播、或吸收。辐射能必须被吸收才能转化为热。辐射传热速率随物体的面积、温度和两个物体的表面特性而变化。
2.4影响加热损失的因素
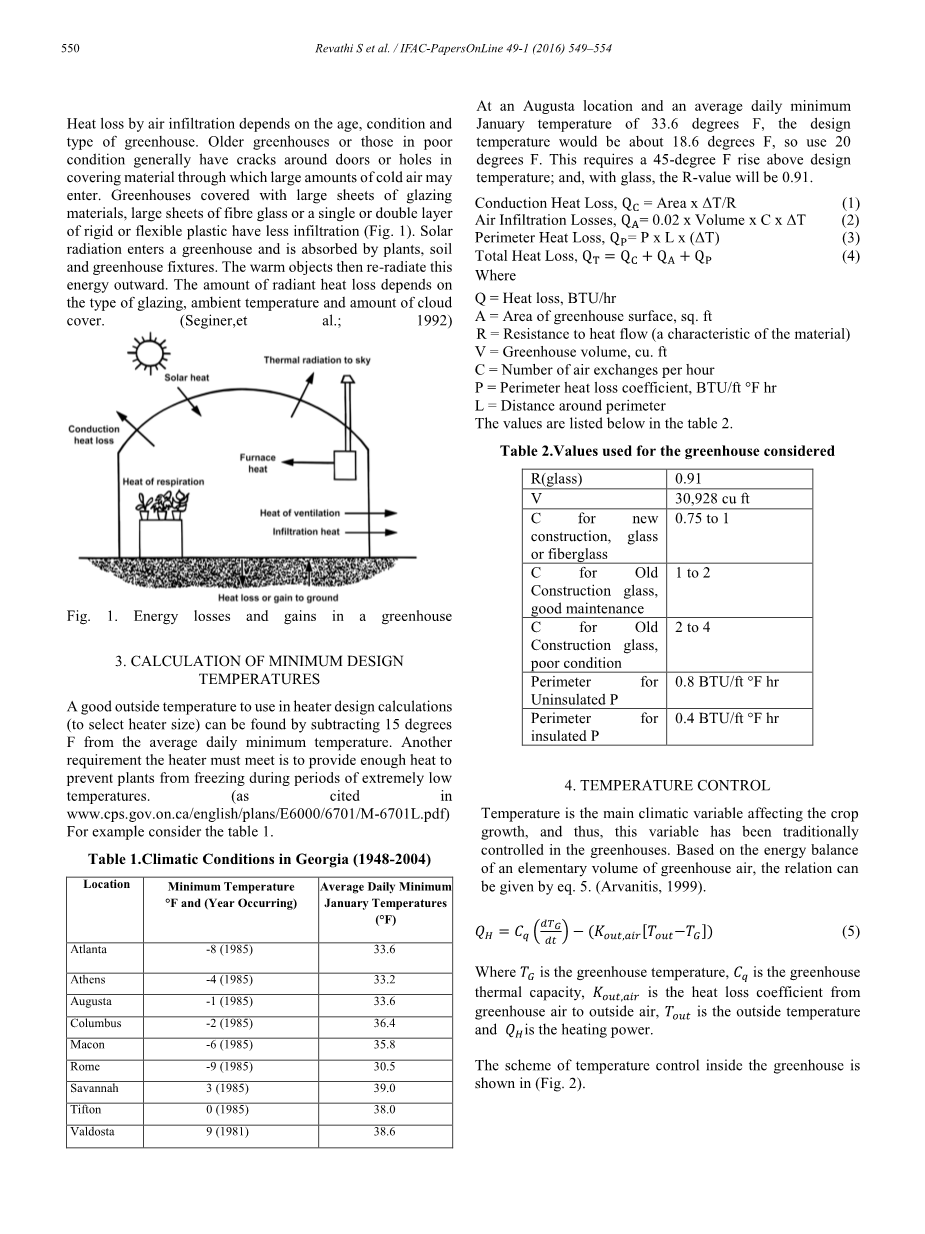
空气渗透热损失取决于温室的年龄、条件和类型。旧的温室或条件较差的温室通常在门周围有裂缝或覆盖材料上有孔洞,大量冷空气可以通过这些缝隙进入。用大片玻璃材料覆盖的温室,大片玻璃纤维或单层或双层、刚性或柔性塑料渗透性较少 (图1)。太阳辐射进入温室,被植物、土壤和温室装置吸收。然后,温暖的物体重新向外辐射这种能量。辐射热损失量取决于玻璃的类型、环境温度和云量。(Seginer,et al.; 1992)
图1 温室内的能量损失和收益
3.最低设计温度的计算
在加热器(选择尺寸的)设计计算中所使用的良好外部温度可以从平均日最低温度中减去15华氏度。加热器必须满足的另一个要求是提供足够的热量,以防止植物在极低温度期间结冰。参考表一:
|
地点 |
最低温度°F和(发生年份) |
一月平均日最低气温(°F) |
|
亚特兰大 |
-8(1985) |
33.6 |
|
雅典 |
-4(1985) |
33.2 |
|
奥古斯塔 |
-1(1985) |
33.6 |
|
哥伦布 |
-2(1985) |
36.4 |
|
梅肯 |
-6(1985) |
35.8 |
|
罗马 |
-9(1985) |
30.5 |
|
萨凡纳 |
3(1985) |
39.0 |
|
提夫顿 |
0(1985) |
38.0 |
|
瓦尔多斯塔 |
9(1981) |
38.6 |
表1 格鲁吉亚气候条件(1948-2004年)
在奥古斯塔的某个地方,一月份的平均日最低气温为33.6华氏度,设计温度大约为18.6华氏度,因此使用20华氏度。这要求高于设计温度45华氏度;而对于玻璃,r值为0.91。
传导热损失:
空气渗透损失:
周界热损失:
总热损失:
Q = 热损失,BTU/hr
A = 温室表面面积,sq.ft
R = 热流阻力(材料的一个特性)。
V = 温室容积。cu.ft
C = 每小时换气次数
P = 周长热损失系数, BUT/ft°Fhr
L = 周界距离
数值列于下表二中。
|
R(玻璃) |
0.91 |
|
V |
30 928 cu.ft |
|
新结构下每小时换气次数(玻璃或玻璃纤维) |
0.75到1 |
|
旧建筑玻璃每小时换气次数(维护良好) |
1到2 |
|
旧建筑玻璃每小时换气次数(维护较差) |
2到4 |
|
非绝缘材料P |
0.8 BUT/ft°Fhr |
|
绝缘材料P |
0.4 BUT/ft°Fhr |
表2温室使用的参考数值
4.温度控制
温度是影响作物生长的主要气候变量,因此,传统上在温室中控制温度。基于温室空气基本体积的能量平衡关系,可由式5给出关系式.(阿瓦尼蒂斯,1999)。
其中是温室温度,为温室热容量,是温室空气对外界空气的热损失系数, 是外部温度,为加热功率。
温室内部温度控制方案如图2所示。
图2 温室加热系统及其控制
温室的室外温度和室内目前的温度是传感器的输入。计算误差和误差变化量,作为模糊控制器的输入。输出是保持温室处于最佳温度所需的加热功率。
5.模糊控制
在过去的十年里,模糊逻辑在科学界引起了广泛的关注,基于模糊知识的系统是模糊集和模糊逻辑方法最成功的应用之一。这主要是由于使用模糊规则表达知识具有一定的灵活性和简单性以及在这一领域的理论发展。
模糊控制的目标是存在可能将人类的专家知识以语言的if-then规则的形式实现。模糊控制器的设计从语言变量、过程状态、输入输出变量的选择开始。下一步是语言规则集的选择和模糊推理过程的选择。一旦规则被建立,经过推理,就一定生成模糊集和清晰的输出值,也必须建立一个去模糊化策略。(Horiuchij,2002)
图3 模糊控制器框图
模糊控制器框图如图3所示。它由四个主要模块组成:模糊化接口将输入的清晰信息转化为模糊集。知识库为模糊化模块、接口引擎和非模糊化接口提供了正常工作所必需的信息。决策单元或接口引擎计算所设置的语言规则的含义。解模糊接口将模糊集合(规则库中每个规则的单独贡献)的并集转换为清晰的输出。(Chuen-Lee, C., 1990)
5.1基于粒子群优化模糊逻辑控制
为了提高模煳控制控制系统的自动化程度,采用粒子群优化技术,提出了一种“接近最优”的控制器综合策略。粒子群优化算法是利用粒子群寻找最优解的一种优化方法。每个粒子群算法都是解空间中的一个解。该算法可以解释如下。(Eberhart,r.1995)(Lafont2002).
1.每个粒子i具有以下属性:搜索空间中的当前位置、当前速度和搜索空间中的个人最佳位置。
2.个人最佳位置对应于搜索空间中的位置,其中粒子i呈现由目标函数f假设最小化任务确定的最小误差。
3.标记为的全局最佳位置表示在所有中产生最小误差的位置。在迭代过程中,群中的每个粒子都使用以下两个方程进行更新:
其中和分别为更新粒子速度和当前粒子速度,和分别为更新粒子位置和当前粒子位置,其中和为两个正常数,和为[0,l]范围内的标准化单位随机数,w为惯量。
在FLC中使用粒子群算法进行磁场调节的方法如图4所示。
图4 用粒子群优化FLC的流程图
在这个过程中,每个粒子被塑造成代表FLC的输入和输出的MF参数。这里使用的成本函数是均方根误差。PSO参数如下表3所示。
|
PSO参数 |
值 |
|
人口规模 |
25 |
|
个人学习系数 |
1 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236750],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

