
英语原文共 8 页
半球谐振陀螺仪的运行与机械化
Anthony,Matthews Ex;Litton,首席科学家;amatthewst 10@gmail.com
摘要
半球谐振陀螺(HRG)在高精度惯性传感器领域是独一无二的。它的第一批应用程序之一是卡西尼号对土星、它的指环和卫星的任务。自那时以来,它一直被选择用于精确空间任务的陀螺技术,无论是军事任务还是商业任务。对于这些任务,HRG已经机械化运行在全角度(WA)模式时,运行在高动态率是需要的。然而,当高灵敏度和非常精确的角度测量处于溢价时,同样的HRG会切换到力重平衡(FTR)模式。在这种FTR模式下,陀螺以低速率工作,从而牺牲了HRG固有的高速率能力。
应该注意的是,第三种机械化可以实现,它提供了与WA模式相同的高速率能力,同时也具有FTR模式固有的灵敏度。这种模式被称为全角度跟踪(WAT)模式。要实现这种模式,需要对负责陀螺仪的读出和控制的电子设备进行更改。本文将概述这些机械化的变化,并表明减少支持HRG的电子学是可能的。由于电子噪声特性对陀螺的噪声灵敏度有很大的影响,控制电子学的降低将使整个HRG传感器的噪声特性得到改善。文中给出了该工作模式的机械化过程,并对其进行了仿真,证明了陀螺仪的高速率和高精度灵敏度。应该指出,在实验室和极端环境条件下,WAT模式实际上已经得到实施和测试。
最后,D·林奇在他的一篇论文“参考文献2”中清楚地证明了在考虑HRG的性能时,“大小确实很重要”。为了寻求高精度的HRG技术,本文将概述HRG型的几何形状,机械化的变化将使HRG的精度性能与目前HRG应用中的精度相当,但生产成本却大大降低。低成本的技术提出了“玻璃吹制”和“玻璃成型”,这些在今天的许多机构中得到了积极的推广,并取得了良好的效果。在设计一种新的HRG以满足空间和地面应用时,将讨论将这些技术结合起来。引入的“玻璃吹制”允许进行几何改变,使HRG不是唯一的几何候选。相应地,引入了Shell谐振器陀螺仪(SRG)这个术语来涵盖这些其他几何学。
介绍
半球谐振陀螺仪HRG在其简单性和探测极小角度运动的能力方面的独特之处。这种陀螺仪在今天的太空操作中起着非常重要的作用。它的第一次应用是当它被选为卡西尼探测器探索土星,它的指环和卫星的惯性参考。经过二十多年的操作,HRG仍在运行,直到9月15日卡西尼探测器被故意终止于土星表面时才结束运行。2017年。HRG技术也已成功地用于许多其他空间任务和轨道卫星。它的下一个主要任务是它在即将到来的詹姆斯韦伯太空望远镜的姿态控制中的作用,这无疑将提高我们对宇宙的认识。对于这个特定的任务,需要有探测小于1毫秒的运动的能力。
HRG起源于非常卑微的开端。1890年,G.H·布赖恩(G.H.Bryan)写了一篇优雅的论文,名为“关于旋转圆柱体或钟的振动中的节拍”。他指出,当一个物体在振动,在他的例子中是一个敲击的钟,并受到一个角度旋转,科里奥利力产生,导致振动模式的位移。通过对这种位移的测量,可以推断出所施加的角度旋转的大小。基本原理科里奥利力的产生,是目前使用的绝大部分MEMS陀螺仪传感器。由于HRG的成功历史及其作为精密测角装置的优越性,本文将重点研究HRG。
HRG由高纯石英材料构成,内部阻尼损失小。此外,如果将HRG封装在高真空中,以抑制气体阻尼对谐振腔的影响,则可以获得很高的Q谐振因子。Q值大于10,000,000。高Q意味着陀螺保持固定振幅驻波所需的能量较少。目前许多机构正在进行的壳牌谐振陀螺仪的研究任务是小型化和降低成本,同时提高精密角度精度。本研究直接适用于人力资源开发。
HRG作业模式
到今天为止,HRG已经被机械化地以两种不同的操作方式运作,每一种都有自己独特的优势。1)作为一种能承受极高角速度的速率积分陀螺仪。这通常被称为WA模式,因为总旋转角存储在谐振器上。2)作为一种机械式速率陀螺仪,在低速率范围内工作时,具有最佳的精度性能。这种工作模式通常被称为FTR模式,因为在固定位置施加了一系列精确的电压脉冲来保持振动模式,施加在谐振器上的电压与施加在HRG上的频率成正比。角可以通过控制处理器中速率的积分来计算。3)设计了第三种模式,即描述性较强的第三种机械化方式,其目的是提供高速率的操作,同时又具有较高的灵敏度。这种工作方式被称为全角跟踪(WAT)。在设计这种新模式的同时,对传统的机械化进行了一些改变,降低了HRG的复杂性,进一步减少了操作陀螺仪所需的电子设备的数量。WAT的最大优点可能是,除了维持精确驻波所需的电压之外,不需要在谐振器上施加任何其他的电力,这假设正交效应是在HRG控制处理器中模拟开环的。该方法减少了驻波的随机运动,提高了角度随机行走的性能。因此,谐振器是一个完美的积分器。
基本HRG动力学
下图(1)显示了基本的HRG壳体在其基本振动模式之一的振动,在这种情况下,n=2模态显示了半球形壳体在施加外力激励时的总变形,最好是在HRG共振频率或多次激励下,这种作用力会引起有节点和反节点的驻波。在图(1)中,可以观察到两种类型的变形:沿x-y轴的径向变形和沿z轴的轴向变形。
图(1)典型HRG的有限模型显示了壳体在n=2模式下的变形。
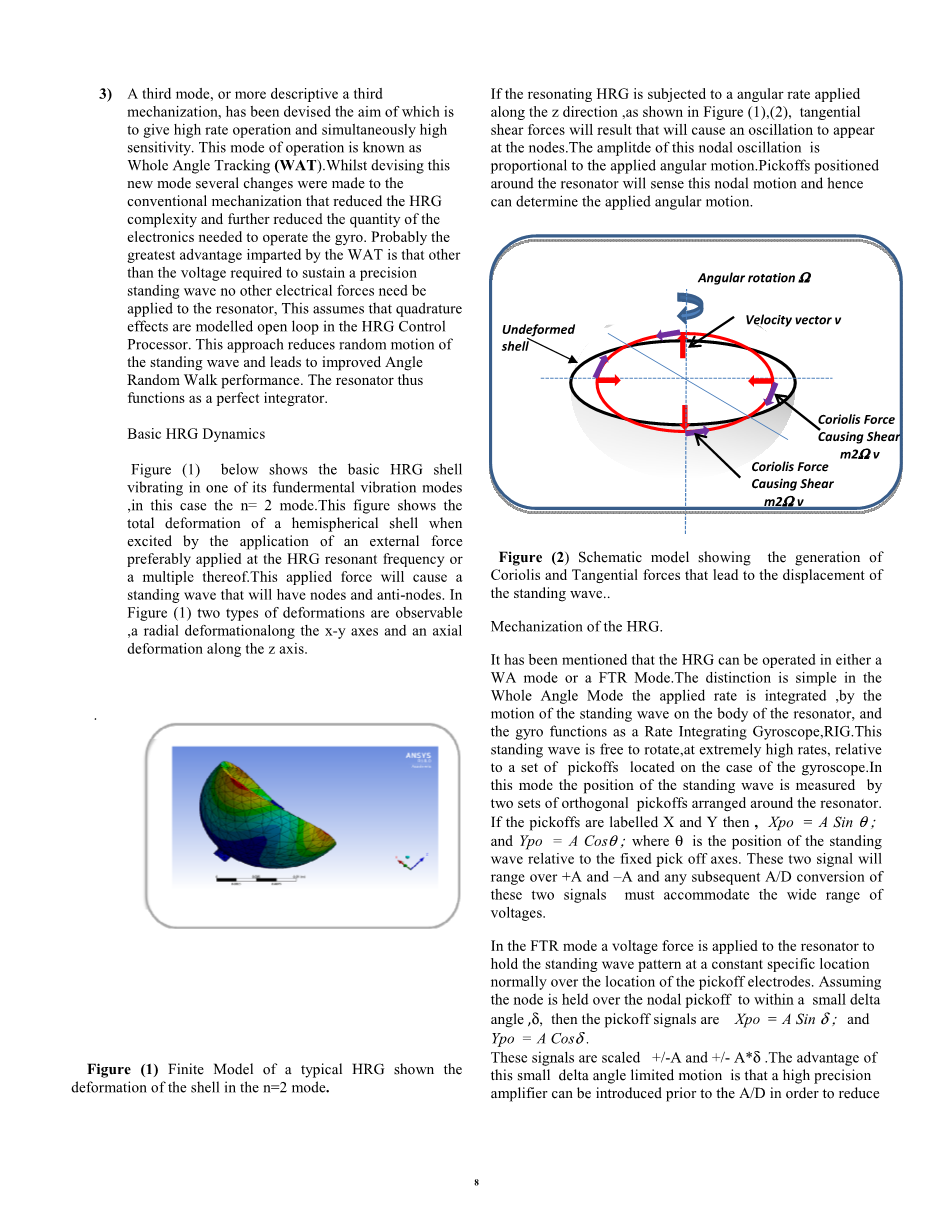
如果共振HRG受到沿z方向施加的角速度,如图(1)、(2)所示,切向剪切力将导致节点处出现振荡。该节点振动的振幅与施加的角度运动成正比。位于谐振器周围的偏转会感应到这个节点的运动,从而确定所施加的角运动。
图(2)示意图模型,显示产生科里奥利力和切向力,导致驻波的位移。
HRG机械化
已经提到,HRG既可以在WA模式下运行,也可以在FTR模式下工作,区别很简单,在整个角度模式下,通过驻波在谐振器体上的运动来集成应用速率,陀螺仪作为速率积分陀螺仪(RIG),这个驻波可以自由旋转,在极高的速率下,相对于陀螺仪外壳上的一组拾取器。在这种模式下,驻波的位置是由设置在谐振腔周围的两组正交拾取来测量的。如果拾取标记为X和Y,则XPO=A Sintheta;;和YPO=A Costheta;;其中theta;是驻波相对于固定拾取轴的位置。这两个信号的范围将超过A和-A和任何后续的A/D转换这两个信号必须适应广泛的电压范围。
在FTR模式下,向谐振器施加电压力,将驻波图固定在固定的特定位置上,通常位于摘出电极的位置上。假设节点被保持在节点拾取到一个小的三角delta;内,那么摘出信号是xpo=A sindelta;;和ypo=A cosdelta;。这些信号被定标为/-A和/-A*delta;。这种小三角限制运动的优点是可以在A/D之前引入一个高精度放大器,以减小引起剪切m~2Omega;v角旋转Omega;速度矢量v未变形壳8的高精度放大器。*delta;信号,使灵敏度增强。
这两种工作方式的优点以前都有说明,但有一种独特的机械化方式,这两种模式都有其可取的特点,即高转速能力和同时增强的灵敏度,这种模式被称为全角度跟踪模式(WAT)。
全角跟踪模式(WAT)
1)定义陀螺仪的参考轴,这显然是一组电极固定在陀螺仪情况下的摘出轴。2)定义了I型theta;陀螺仪的驻波轴。波可以相对于拾取轴旋转,这取决于应用于陀螺仪的角速度。3)进一步定义激励轴Iε,它由激励电极的位置和施加在这些电极上的电压来确定。提取出的输出是itheta;矢量和外加激励iε矢量的乘积,因为这两个向量是向量,两个乘积是可用的(itheta;)。Iε),点积和(itheta;*iε)交叉积。(Itheta;.)Iε)=(we}cos(εminus;theta;);(itheta;*iε)=(we}Sin(εminus;theta;)。在WA模式下,拾取轴是固定的(ε=0),并且波可以自由地围绕壳体的体旋转。因此,点积W.E和交叉积W*E是W.E=(we}Cos(minus;theta;)和W*E=(we}Sin(minus;theta;)。驻波相对于拾取轴的位置为theta;=-tan-1(W*E)/(W.E)。
图3显示了原理图HRG和ipo,itheta;,ε轴
在FTR模式下,拾取轴再次固定,(ε=0)通过施加一组电压脉冲使交叉积W*E=(We)Sin(minus;theta;)变为零,从而使波的角位移恢复到原来的位置。如果Sin(minus;theta;)保持在较小的值,比如delta;,在转换到数字领域之前,可以引入大的放大,应该注意的是,反馈电压将向谐振器施加力,这种反馈信号的任何随机变化都会导致角度随机行走ARW的增加,同时还应该记住,在FTR模式下,陀螺标度因子将不同于WA模式,因为现在它是不一样的。必须包括反馈电子学的标度因子误差和非线性误差。在WA和FTR机械的情况下,激励轴由固定的拾取电极和施加在这些激励电极上的固定电压固定,以确定Wat模式机械化中的激励轴,我们在激励电极上施加正弦和余弦变化的励磁电压,从而使激励轴旋转。
在Wat模式下,交叉乘积被驱动到零i。E=(we}Sin(εminus;theta;)=0。这不是通过强迫驻波,而是通过计算激发波E和数学驱动它达到相等的theta;来实现的。因此,(εminus;theta;)=0,因为这是在控制处理器中执行的计算,所定义的激励轴可以很高的速度旋转,以跟踪在谐振器唇上移动的真实驻波,或者在任何导致获得谐振器知识的函数下驱动。对于谐振腔,在施加速率反馈电压的情况下,Wat避免了噪声变化引起的ARW增加。交叉积运算产生的小信号允许在A/D信号转换器转换前将一个大的放大因子放在拾取上,就像在FTR模式下的情况一样,从而提高了灵敏度。HRG在FTR模式下工作时已经显示出小于1毫秒级的灵敏度,而Wat也有望得到类似的结果。Wat的另一个好处是,Wat模式的比例因子应该与WA模式相同,即在每百万级的子部件中。综上所述,WAT将具有以下优点:1)提高了尺度因子性能,lt; 0.1 ppm.
2) 非常高的动态速率能力。gt;720度/秒
3)高的角运动检测灵敏度。
全角度跟踪(WAT)模式的实现
为了执行WAT,需要对HRG的正常机械化进行一些修改。其中一些变化在Litton井下HRG中得到了成功的实施,这是Litton、一家航空航天公司和一家石油服务公司Anadrill的联合项目。由此产生的130 R井下HRG的设计目的是在175℃和非常高的冲击水平下运行,同时将整个封装的尺寸缩小到1.5英寸的外径。
图(4)(A)HRG 130 p电极配置(B)HRG 130 R电极配置
为了在这种温度下工作,必须对HRG电子和陀螺仪的类型进行剧烈的改变,以满足尺寸和环境因素。减小130 p HRG外力环的封装尺寸,在谐振腔壳内放置摘除力电极,同时引入多路复用,使电容激励电极也能起到强迫电极的作用。下面的图(4a)示出了当前130 pHRG和图(4b)的配置,该配置类似于在130 R井下HRG中测试的配置。从下一节进行的噪声模拟可以看出,施加在谐振器上的任何电气控制电压都会导致角度随机行走。因此,为了获得最佳的性能“无”电控制力,除了那些驱动谐振器进入一个设定的振幅共振,应该施加在谐振器上。这意味着,控制HRG或更高精度的处理器应将正交校正误差应用于数字开环。值得注意的是,在目前的HRG机械化中,采用开环和闭环正交修正。
为了满足不向谐振器施加任何电力量的标准,该标准可能导致激励Pickoff电压高于所述100kHz,这将在约4,000Hz的谐振频带之外用于30mmHRG。对于稍后部分中概述的精密谐振器的新的制造技术,这应该能够更好地控制正交;由于谐振器周围的质量变化,并且应当能够实现开环补偿。这是考虑将小型数字信号处理器、DSP集成到壳体谐振器陀螺仪中的情况,SRG、封装将导致独立的SRG传感器,其仅需要输入功率并且将输出数字精度角度数据。lt;
资料编号:[4620]
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

