英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于机器视觉的
智能化指针仪器读数方法
Liuhuanjun
自动化系,广东工业大学,广州,广东,中国
摘要:本文为指针式仪表读数提出了一种新的智能方法来代替人工读数。这个指针式仪器是被捕捉到的。首先,一种基于非监督式学习的分割算法被用来分割图像来定位尺度和指针。这种方法将模糊c均值方法和模糊支持向量机相结合,并且可以有效的将图像细分为目标物体和背景。其次,根据指针式仪器的特点,仪器指针的中心由霍夫变换确定。然后,计算刻度区域和指针区域的中心角。最后,指针仪器的读数值被确定。实验证明本文提出的方法是有效的。
关键字:指针仪表读数;机器视觉;非监督式学习
1 介绍
目前,指针式仪表广泛用于生产过程。通常,人们用眼睛阅读指针式仪表。但是,人工阅读需要大量的人力资源,并且不稳定。在指针式仪表自动读数方面已经做了一些研究。本文提出一种新的基于机器视觉的方法来计算指针式仪表的读数。
2 刻度和指针区域分割
图1展示了指针式仪表的图像。如果想要读指针式仪表,那么刻度和指针必须被定位。所以图像中刻度和指针的区域需要被分割。但是由于指针和表盘的材料不同,且玻璃覆盖在表盘上,仪表图像的灰度级不统一。
为了分割图像,一种新的基于非监督式学习的算法被提出来。聚类可以用于分割数字图像得到明显的区域达到边界检测和目标识别,但是表现结果并不令人满意。本文提出一种基于非监督式模式分类的新方法。该方法首先用模糊c均匀方法将图像分级,然后,选择模糊投票得到的高可信度的样本。这些样本被用来训练模糊支持向量机。最后,图像被训练过的模糊支持向量机分类。
模糊c均匀目标函数划分为簇由这个给出:
***公式
其中***是簇的原型,数组表示比例矩阵,也就是说,
***公式
参数是各个模糊隶属度的权重指数,决定结果分类的模糊性。当高隶属度值分配给voxels时,FCM目标函数最小,voxels的强度接近特定类的质心,当voxels数据远离质心时,分配低隶属度值。
因为图像的像素不是孤立的点,代表区域特性的特征被选择。有三种特征用于FCM,如下:
P(x,y)的特征fs1(x,y):
***公式
其中gray(x,y)是p(x,y)的灰度级
特征fs2(x,y):
***公式
其中,gray(x,y)是p(x,y)的灰度级,fs2(x,y)是p(x,y)的邻域9个点的平均灰度级
特征fs3(x,y):
***公式
其中gray(x,y)是p(x,y)的灰度级
***公式
根据特征通过FCM将图像分级后,高可信度样本在以下情形被选择。第一,样本的隶属度值大于一个阈值:
***公式
其中,fm(x,y)是由FCM分配的隶属度值,Tm是阈值,本文中是0.8
第二情形是样本的邻域有三个点也符合第一种情形。
选择样本后,样本被用于训练模糊支持向量。由于模糊支持向量机的良好的泛化能力,它已经被用于作为一种最高性能的分类系统。本文提出了一种模糊支持向量机。它将模糊理论和支持向量机结合。
FSVM 由模糊层和SVM组成。模糊是模糊层的功能,模糊支持向量机的构造如图1所示。
***图
特征被输入到模糊层,被转化为模糊输出。这一层利用高斯函数作为隶属度函数,功能如下:
***公式
然后,SVMs作为分类器用于模糊输出。
研究表明,混合核的使用比那些单一普通核获得更好的性能。Hence,混合核应用于这个研究。本文采用的核的功能如下:
***公式
为人熟知的在多邻域获得成功的遗传算法构成全局优化技术,因此,本文为FSVM提出一种基于Gas的组建选择方法。这种方法用于优化FSVM。分类的准确性被用于评估分类的性能。
分割结果如图2
***图
图2(1)是原始图像,图2(2)是被otus方法分割的结果。图3是Tsallis entroyy方法分割的结果,图4是本文提出的方法分割的结果。
3 读数开始计算
分割之后,刻度和指针的区域知道了。根据指针式仪表的特性,刻度和指针围绕着一个中心。霍夫变换用于确定这个中心。刻度下的边缘是圆弧,圆弧的中心也是整个区域的中心。圆弧的中心和半径可以通过霍夫变换得到。中心和半径可以通过边缘的三个点计算得到。如果三个点的足够排列被用来计算中心和半径,半径可以通过最大概率确定。确定了中心和半径后,因为刻度联通的区域是圆环的一部分,它可以通过这种方法移除。如果点属于符合方程9的区域,它可以被移除。
***公式
其中,(x,y)是点的坐标,Xc,Yc是中心的坐标,Rc是半径,Tc是阈值
因为指针的主要区域在连通域之下,指针区域可以通过相似的方法确定。如果这些点被移除,那么剩下的部分就是指针区域:
***公式
可以通过比较指针和刻度的中心角来得到仪表的读数。所以需要获得每个刻度的中心角。刻度区域的轴可以得到。给出了各区域的中心和起始点,中点和终点线,并计算每条线的和x轴的角度。刻度的角度由公式11确定:
***公式
其中,Ali是线和x轴的夹角,由如下公式给出:
Ali=***
指针区域的中心角AP 通过相同方法得到
指针的一些部分在连通域之上,所以这个区域可能会被错误的当成刻度区域。为了移除这个区域,方法是可取的。如果区域满足这两个条件,刻度区域n可以***,条件1是
***公式
其中,ap是指针的中心角,ASn是刻度区域n的中心角,e是一个很小的阈值。
情形2是
***公式
ASn是刻度区域n的中心角
刻度区域和指针区域如下图
***图
图3.1是原始图像,图3.2是刻度区域,图3.3是指针区域,如果指针在刻度K和K 1之间,仪表读数由公式13计算
***公式
其中,SVk是刻度K的值,Ask是刻度k的中心角,AP是指针的中心角
4 实验
捕获100张指针仪表的图像,每张图像的读数先由人工读出。然后,这些仪表的读数由本文提出的方法计算得到。比较显示计算得到的值在误差允许范围内和人工读数一致。
5 结论
本文提出一种基于机器视觉的新的智能的方法来计算指针式仪表读数。捕捉图像后,图像中刻度和指针的区域要被分割。但是仪表图像的灰度级不均匀,所以一种基于非监督式学习的新的分割算法被提出。这种算法将模糊c均匀法和模糊支持向量机相结合,可以将图像高效分割为目标和背景。因为刻度和指针围绕表盘的中心,霍夫变换被用于确定这个中心。然后刻度和指针区域被分离提取。刻度和指针区域的中心角被计算出。最后,通过比较指针和刻度的中心角计算出指针式仪表的读数。实验显示计算出的读数值在误差允许范围内和人工读数一致。
参加文献:
一种用于指针式仪表读数的
基于图像的智能系统
摘要:本文为指针式仪表读数提出一种基于图像的系统。主要的贡献由有两方面。首先,为了注册指针式仪表的图像,我们提出二进制描述符,像ORB()。然后,我们提出基于圆的区域统计直方图方法来很好的定位指针。CRH方法对于光照有很好的健壮性,并且相比于之前的方法很快速。实验结果验证了我们这个基于图像的PIR系统的有效性和可行性。
索引:指针式仪表读数;基于ORB的注册,基于圆的区域累计直方图
1 介绍
指针模拟仪器,像温度计和气压计,广泛用于变电站和其他电力系统。目前,大多数任然通过人工读数,耗时又耗力。实现指针仪表的自动化读数系统具有重大价值。
为了读指针仪表的读数,近几年,已经提出了一些基于图像的方法。这些方法主要包括两步:1,表盘区域检测;2,指针定位。在表盘区域检测方面,大多数之前的方法采用模板匹配,或者椭圆拟合,这些都依靠先前的形状特征。对于一些特定的指针仪表,这些方法是有效的和实时的。然而,当有不同类型的圆形仪表,不同的特定的设置,比如不同的视点、刻度和分辨率,它们不同很好的匹配这种情况。至于指针定位,带有图像剑法的霍夫变换在大多数系统中大概是最受欢迎的。在我们的测试中,霍夫变换对于来自刻度值、刻度线、和其他因素的噪声敏感。且计算和存储方面代价较大,在嵌入式设备中运行不切实际。并且,对于图像细分方法,实际操作指针通常不允许调整到参考位置。一些工作也直接扫描密度和检测的圆,通关阈值评判位置。这种方法速度快单对光照敏感。
***图
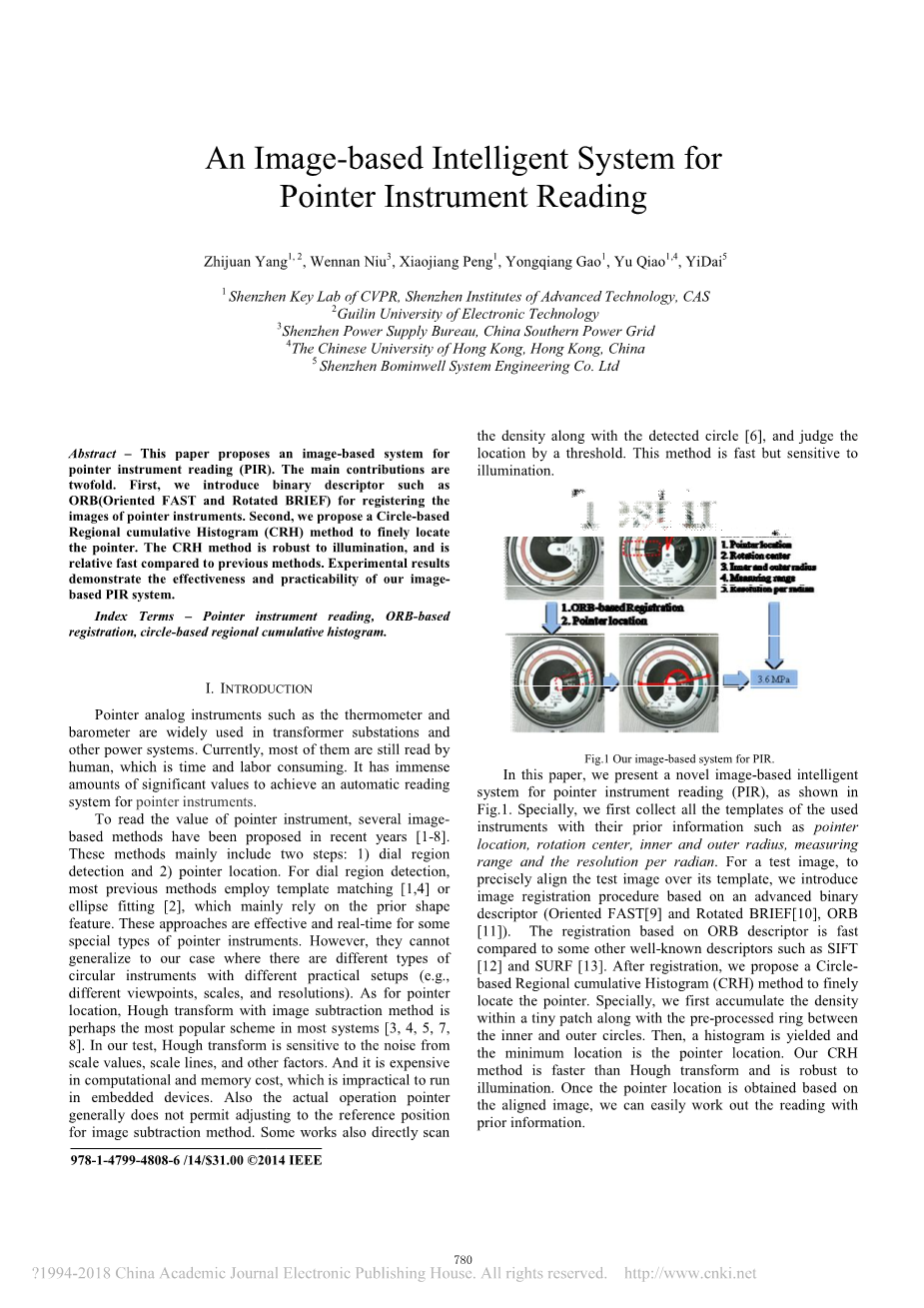
本文中,我们为指针式仪表读数提出一种新的基于图像的智能系统,如图1所示。特别的,我们首先收集使用的仪表的模板的一些先前的信息,比如指针位置,旋转中心,内径和外径,测量范围和每弧度的分辨率。对于一张测试图像,为了精确的将测试图像的模板对齐,我们介绍一种基于先进的二进制描述符的图像配准过程。相比其他一些著名的描述符,像SIFT和SURF,基于ORB描述符的注册比较快。注册后,我们提出基于圆的区域累计直方图方法来很好的定位指针。特别的,我们首先在一块小patch和内外圆之间预处理过的环内积累密度,。然后,形成直方图,最小的位置就是指针的定位。我们的CERH方法比霍夫变换快,且对光照具有健壮性。基于对齐的图像,一旦获得指针定位,利用之前的信息,我们可以轻松计算出读数。
文章剩余部分组织如下。模板先验信息的提取和第二部分介绍的基于ORB的图像配准。指针定位方法在第三节提出。实验结果在第四节给出。第五节结束本文。
2 模板和注册
本节介绍模板及先验信息的提取,和基于ORB的图像注册。在实际工程应用中,作为相机的不同设置的结果,比如不同的视点,刻度和分辨率,表盘倾斜等,镜片表面和表盘不平行。它将产生氏视差影响PIR。模板和注册用于解决这些问题。
A模板和先验信息
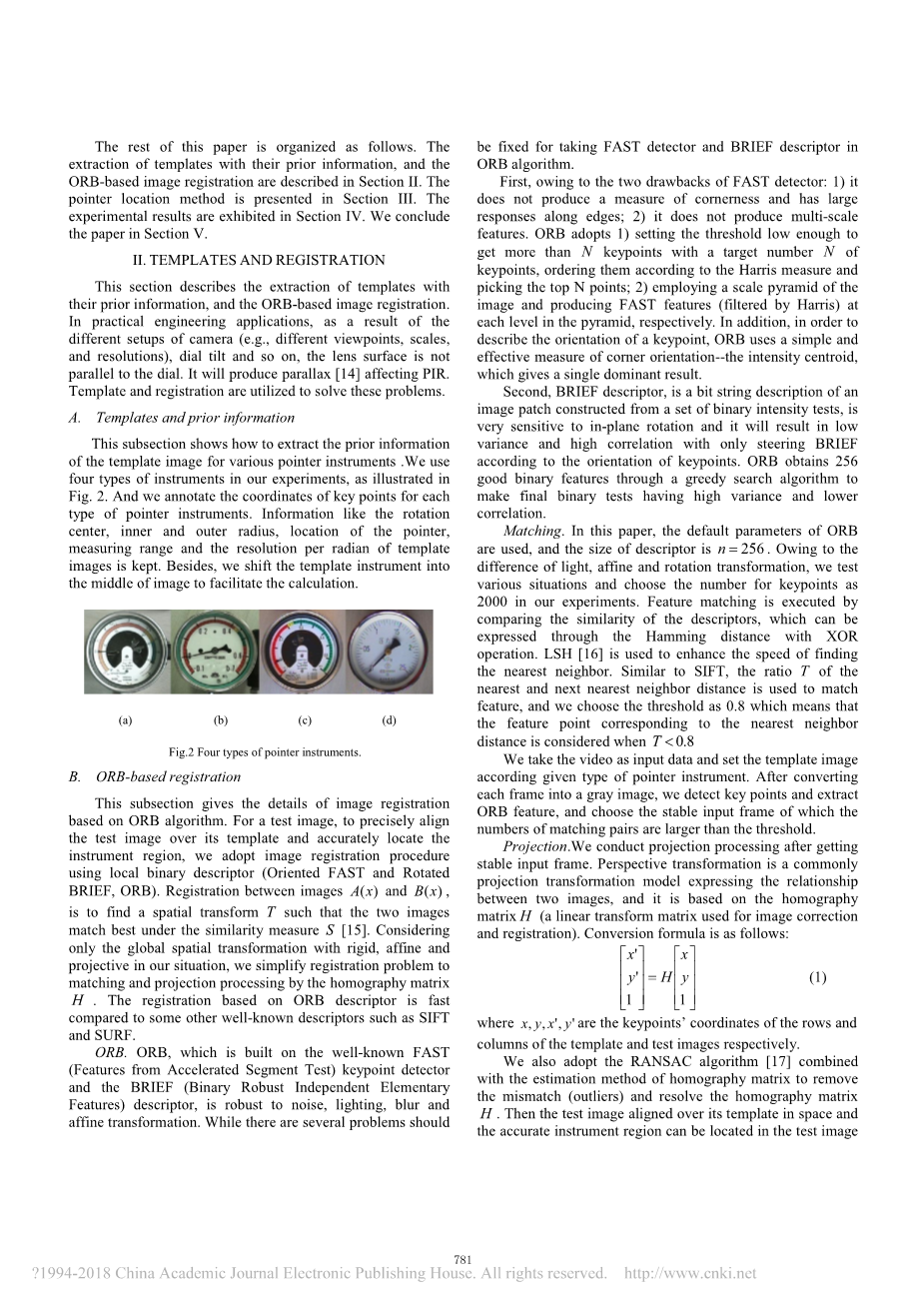
这个小节展示怎么从众多指针式仪表中提取模板和先验信息。在实验中,我们使用四种类型的仪表,如图2所示。我们为每种指针仪器的关键点标注坐标。像旋转中心、内外半径、指针位置、量程和每弧度的分辨率等模板信息被保留。此外,我们将模板仪表移到中间来方便计算。
***图
B基于ORB的注册
这个小节给出基于ORB算法的图像注册详情。对于测试图像,为了精确将测试图像和模板对齐,且精确定位仪表区域,我们使用本地二进制描述符采用图像注册程序。图像A和B之间的注册就是找一个空间变换T使得两张图象在相似度下最匹配。在仿真中只考虑具有刚性、仿射、和射影的全局空间转换,我们将匹配问题简化为同型矩阵的匹配和投影处理。基于ORB描述符的注册相比一些其他著名的描述符更快,像SIFT,SURF。
ORB,建立在著名的FAST关键点检测器和BRIEF描述符上,对于噪声、光、模糊和仿射变换很健壮。然而,为了在ORB算法中实施FAST检测器和BRIEF描述符这里还有一些其他问题需要解决。
首先,由于FAST检测器的两个缺点:1他不能产生混合的度量,在边缘有较大响应。2不产生多尺度特征。ORB采用1.将阈值设置足够低得到超过N个带有大数字N的关键点,根据Harris排序,选择前面N个点;2采用图像的规模金字塔,在金字塔的每层产生FAST特征(通过Harris滤波)。此外,为了描述关键点的方向,ORBORB使用一种简单和高效的角方向测量,强度质心,他给出一个主要的结果。
第二,BREIF描述子,从一系列二进制强度测试构造出的图像块的位串描述,对平面内旋转非常敏感,仅仅根据关键点的方向进行转向,这可能导致低方差和高相关性。通过贪婪算法,ORB获得256个好的二进制特征,使得最后的二进制测试有高方差和低相关性。
匹配。在本文中,使用ORB的默认参数,描述子的尺寸是n=256,由于光,仿射和旋转变换的不同,我们测试各种情形,在实验中选择关键点的数量为2000。
通过比较描述子的相似性,特征匹配得到执行,它通过Hamming距离的XOR操作来表示。使用LSH来加速寻找邻域。和SIFT相似,最近的和下一个最近的邻域距离的比例子T用来匹配特征。我们选择阈值为0.8,意味着当Tlt;0.8,对应最邻近距离的特征点被考虑。
我们将视频作为输入数据,根据所给的指针式仪表设置模板图像。将每一帧图转换为灰度图像后,我们检测关键点,提取ORB特征,选择稳定的输入帧,帧的匹配号码大于阈值。
投影。获得稳定输入帧后,我们进行投影处理。透视变换在表示两幅图像之间的关系时,是一种常见的投影变换模型,它基于同向矩阵H(用于图像校正和注册的线性转换矩阵)。转换公式如下:
***公式
其中,***是模板和相对于的测试图像的关键点的横纵坐标。
我们也采用将RANASAC算法和单应性矩阵评估方法相结合的方法,来消除错误匹配,解决单应性矩阵H。然后测试图像对齐到模板上,准确的仪表区域可以根据公式1在测试图像上被定位。所以我们可以看到矩阵H的准确性很重要。
图3描述了基于ORB算法的图像配准。模板图像在距离20cm,视点在相机和面板大概有0度旋转,测试图像大概25cm,10度旋转处捕获。A是模板和测试图像匹配的结果。B是注册的结果。可以看见,图像中的注册的仪表区域和模板一样,展示了基于ORB算法的图像注册工作的很好。
***图
4 指针位置
仪器的指针总是绕着扇形或圆形区域的轴转动,相比明亮的表盘,它显示一种深色。这种重要的特征可以用于PIR。在这个小节,图像增强后,我们提出CRH方法来很好的定位指针。
A 图像增强
通常,因为光的改变,物体投影,空间辐射的干扰,
全文共6888字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14703],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

