英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
电动汽车智能电子差速系统的嵌入式设计与实现
Ali UYSAL
卡拉比克大学机电工程系技术学院
卡拉比克,土耳其
Emel SOYLU
卡拉比克大学机电工程系技术学院
卡拉比克,土耳其
摘要—本文针对双后轮独立驱动的电动汽车提出了电子差速系统的试验研究。 值得记住的是电子差速系统是一种应用于电动汽车上的新技术,其在弯曲路径的处理上具有更好的平衡性。此外,它比机械差速器更轻,可以通过单个控制器进行控制。 在这项研究中,智能监控电子差速器在电动车上得到实现。嵌入式系统通过模糊逻辑控制器提供电机控制。并且从试验中得到更高的精度
关键词 - 电子差速器; 电动车; 嵌入式系统; 模糊逻辑控制器; 轮毂电机
- 介绍
在公路运输系统中,差速器在防止车辆在弯曲道路上侧滑方面起着重要作用。 实际上,大部分汽车依旧是采用机械差速器的,但是机械差速器不断增长的重量使得其结构变得格外复杂。而且,机械差速并不适用于两个后轮分别独立驱动的情况。 电子差速系统 (EDS) 是电动汽车设计的最新技术的体现。电子差速系统其在弯曲路径上提供了更好的控制和平衡。[1].
在汽车过程中, 电子差速系统使用轮毂电机独立驱动每个车轮,轮毂电机可提供每个驱动轮所需的扭矩,并允许车轮使用不同的速度行驶,以取代多驱动系统中的机械差速器。 转弯时,内外轮以不同的速度旋转,因为内轮的转弯半径更小。电子差速系统根据方向盘控制信号和发动机转速信号来控制每个车轮的驱动力,从而为所有车轮提供所需的扭矩。
电子差速系统方案相较于机械差速器有几个优点。 这个差速系统减少了多余的机械结构例如变速箱和离合器等使得其组成更加简单。对于每个车轮的独立转矩控制能提供附加的一些功能(例如牵引力控制,稳定控制), 可重新编程性使其很容易以添加新功能或根据驾驶者的喜好进行相应调整,从而实现分布式再生制动, 与机械差速器一样,扭矩控制不受内外车轮的限制,另外响应时间更加快速并且能得到每个车轮扭矩的准确信息[2]
在这次研究中,电动汽车的智能监控电子差速系统的设计和实现。文献中有关于这个问题的研究。 这项技术有很多应用,并且随着成功的应用,车辆性能得到了不断改善。 土方卡车的运动由包含两个轮毂电机的电子驱动系统所提供,其能够提供最大动力为2700kW。控制这些发动机在转弯时调整其速度,从而增加牵引力并减少轮胎磨损。 Eliica也配备了电子差速系统。 这款八轮电动车能够在每个车轮上分别进行良好的扭矩控制,以实现高达370公里/小时的速度行驶。还有用于较小车辆的微控制器系统和应用于牵引的一般车辆的控制系统。
在为两台感应电机驱动的电动车辆设计的电子差速系统的过程中,采取五台联合换能器用于控制两台感应电机,并且比较了两台感应电机驱动的五台变压器的性能[3]. DSP TMS320LF2407用作双轮感应电机驱动电子差速系统的控制器,在所提出的前轮驱动系统中,使用直接转矩控制,自适应通量和基于快速观测器的算法 [4]. 永磁同步电机是由永磁体励磁产生同步旋转磁场的同步电机,永磁体作为转子产生旋转磁场,三相定子绕组在旋转磁场作用下通过电枢反应,感应三相对称电流。在电子差速系统的设计中使用两个永磁电动机,以确保电动车能够在崎岖道路上具有更好的轮胎接地性,同时没有了变速传动带来的效率损失。根据其仿真得到结果,通过电子差速系统可以提供高精确度的滑动控制和弯曲道路上的电动车辆发动机的控制 [5].
在电子差速系统设计中,该设计可以在崎岖的道路上提供良好的车辆稳定性,牵引力由后轮上的两个永磁同步电机(PMS)提供。 利用所提出的控制结构,每个轮毂电机的转矩采用模糊逻辑控制。根据不同的工况模拟:直路,斜坡,直道上的驾驶和道路上的驾驶。 仿真结果表明,在弯曲的路径上车辆具有良好的稳定性[6]. 使用直接转矩控制方法对电动车辆的电动差速进行了控制。 在Matlab / Simulink环境中对电动汽车的直接转矩控制进行建模[7]。
在一项为电动汽车电子差速系统提供高效稳定控制方案的研究中,两款无刷直流电机(BLDC)用于驱动电动汽车的两个后轮。 最大扭矩由电子差速控制器(电子差速控制)提供并控制。 所提出方案的有效性和鲁棒性也在Matlab / Simulink环境中得到实验验证 [8]. 电子差速系统的建模和仿真是采用一个新的小波变换控制器,为两个无刷直流电机来驱动右后轮和左后轮。 控制器的数值模拟测试结果通过在直线道路上右转和左转验证[1].
在中国的一项研究中,四轮电动汽车的数值模拟已经在控制性能上进行了仔细的研究。 结果表明,电子差速系统的反馈增益在控制性能方面发挥着重要作用,特别是在转向特性方面。 另外,分析和讨论了反馈增益和转向特性之间关系的机制 [9]. 考虑到轴载荷传递的影响,在具有两轮毂电机的迷你电动车中,电子差速系统控制使用扭矩和两英里滑移率作为车轮扭矩的控制变量 [10].
PID控制方法被用于由四个轮毂电机组成的车辆的电子差速系统神经网络控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。反馈理论的要素包括三个部分:测量、比较和执行。测量关键的是被控变量的实际值,与期望值相比较,用这个偏差来纠正系统的响应,执行调节控制。 转向运动学中,提供了三自由度动态转向模型并且已经提出了用于四轮电动机的角度电子差速系统速度控制系统。[11] 在一个模拟研究中,设计了一个具有两个车轮的电动车辆的模糊逻辑控制电子差速系统。 利用模糊逻辑,在复杂的非线性系统中计算每个车轮的滑动率。 然后用电子差速系统进行必要的动力和扭矩分配。所提出的控制方法的效率和有效性在Matlab / Simulink环境中进行评估。 仿真结果表明,新型电子差速系统控制系统能够将滑移率保持在最佳范围内,从而保证车辆具有过弯时的操纵稳定性[12]。模糊逻辑控制器在闭环反馈控制系统中具有良好的性能[13]。
随着电子技术的快速发展和电子市场的需求,电子产品的趋势是变得体积更小,响应更快 [14]。近20多年来,模糊控制不论在理论上还是技术上都有了长足的进步,成为自动控制领域一个非常活跃而又硕果累累的分支。在这项研究中,模糊逻辑控制的电子差速系统是通过嵌入式系统实现的。嵌入式系统具有一些优点,例如编码少,易用性,实用性,灵活性,快速构建时间,省时和可靠性。由于上述原因,该研究为与此领域相关的研究人员,制造商,研究和开发实验做出了大量贡献[15]。该系统在一辆由后驱的两轮毂电机驱动的四轮车上进行测试。 车辆的测量信息和转向位置信息被应用于电子差速系统。 根据测量信息计算出的左右电机参考速度执行模糊逻辑速度控制。在这种情况下,根据机械差速原理,机械差速带来的损失被消除,并且电动车辆的摩擦将降低,同时实现节能。
在本研究的第二部分中,给出了关于电子差速控制的详细信息和数学公式。 以下部分是关于系统的设计和控制算法。 本研究采用模糊逻辑算法,包括系统的集成方案。 给出了智能控制电子差速系统的MATLAB模型并给出了解释。用于电子差速测试的电动车辆并给出了车辆的规格。 显示实验研究的图形。 最后,在结论部分中,强调了电子差速系统的重要性并展示了所开发系统的准确性。 对电子差速器的发展未来进行了讨论。
II. 电子差速系统
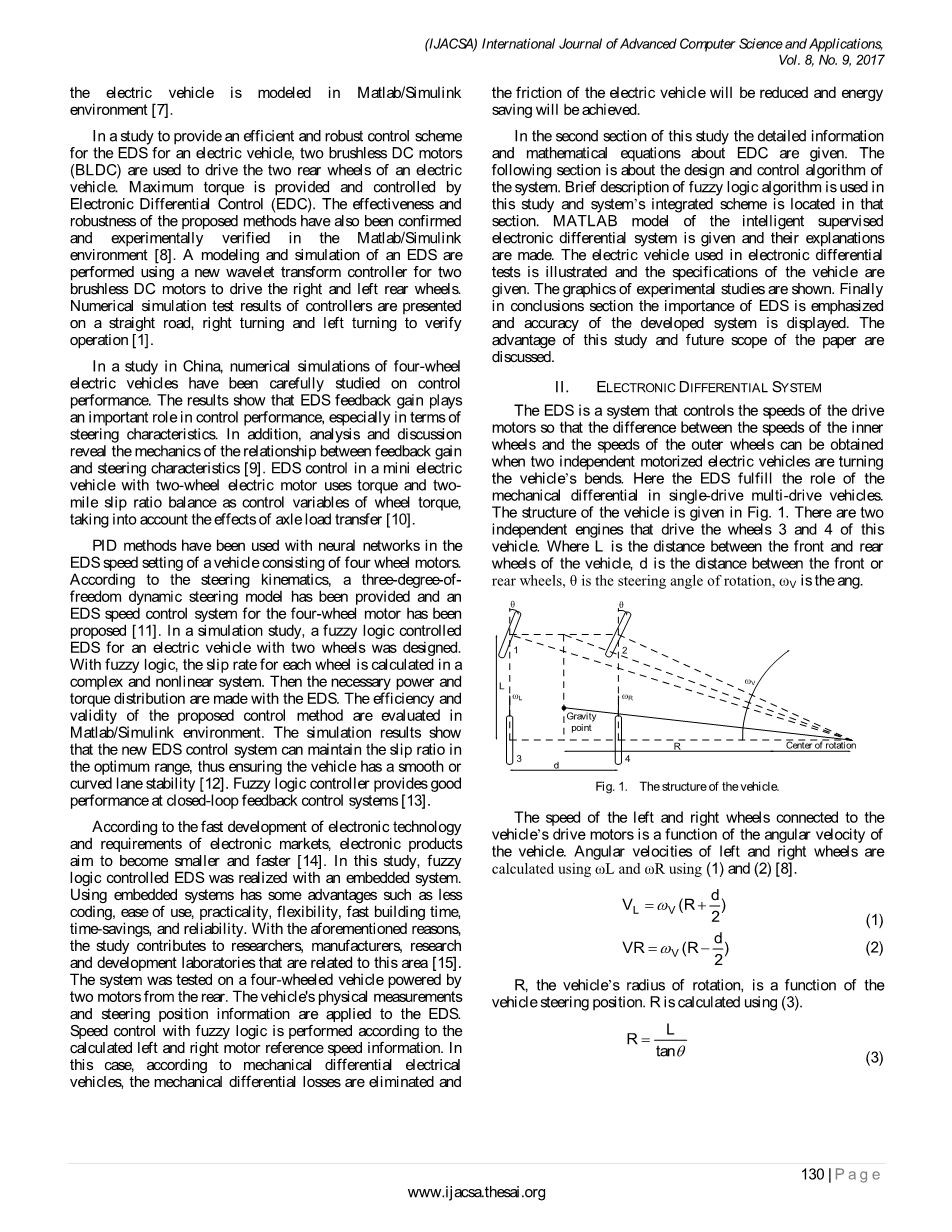
电子差速系统是一种控制轮毂电机转速的系统,轮毂电机独立驱动每个车轮,在传感器的作用下,电动汽车两个独立车轮正在转弯时,可以获得内轮的速度与外轮的速度之间的差异。 此时,电子差速系统发挥了单驱动或多驱动车辆中机械差速器的作用。 车辆的结构如图1所示。有两个独立轮毂电机的车辆车轮3和4。 其中L是车辆前后轮之间的距离,d是左右轮之间的距离,theta;是转向角度,omega;V是角速度。
图1.车辆结构
左轮和右轮的速度之间的关系是关于其角速度的函数。 (1)和(2)使用omega;L和omega;R计算左右车轮的角速度[8].
R, 车辆的转动半径是车辆转向位置的函数。 R的计算由 (3)得到.
由(4)和(5)计算左右驱动电机的角速度,其角速度取决于车辆的转向位置。
由(6)计算车辆的角速度和根据转向位置的左右轮之间的速度差。 由(7)确定车辆相对于转向位置的旋转方向。 根据车速和车轮之间的速度差,由(8)和(9)计算左右车轮的角速度。
电子差速系统的框图如图2所示。
图2.电子差速器的框图.
III. 基于模糊控制的电子差速器控制策略
本研究中设计的电子差速系统框图如图3所示。在此系统中,STM32F4 Discovery开发套件用于控制电子差速系统。 该卡上的STM32F407VGT6微控制器具有1 MB闪存和192 KB RAM。 它有一个32位ARM Cortex-M4F内核。 集成ST-LINK / V2 JTAG调试器,直接与USB或外部电源一起运行,具有3V和5V输出引脚,3轴数字加速度计,能够使用全部100个引脚的输出。 模糊逻辑控制器嵌入到该微控制器中。
Matlab模糊逻辑工具箱用于创建实验工作的模糊逻辑模型,并通过实施模糊控制提供左右电机模型的控制根据计算出的左右电机参考速度信号执行模糊逻辑速度控制。 以误差(e)和误差(de)作为输入。(du)得到电机转速的变化。输入和输出变量使用七个sherds三角形类型隶属函数。
缩写NB,NM,NS,ZE,PS,PM和PB分别指语言变量“负大”,“负中”,“负小”,“零”,“正小”,“正中” ”和lsquo;正大rsquo;。 在对输入和输出参数进行调整并确定基础规则之后,创建右侧和左侧电机的模糊逻辑模型
表1给出了该系统的规则库。 图4显示了右电机模糊逻辑控制器模块的内部视图。 图5显示了嵌入在STM32F4中的智能监督电子差速系统的MATLAB模型。 该模型在Matlab / Simulink环境中创建并直接嵌入到STM32F4开发版中。
表一. 电子差速系统的基础规则
|
e ce |
NB |
NM |
NS |
ZE |
PS |
PM |
PB |
|
NB |
NB |
NB |
NB |
NB |
NM |
NS |
ZE |
|
NM |
NB |
NM |
NS |
ZE |
PS |
NB |
NB |
|
NS |
NM |
NS |
ZE |
PS |
PM |
NB |
NM |
|
ZE |
NS |
ZE |
PS |
PM |
PB |
NB |
NS |
|
PS |
ZE |
PS |
PM |
PB |
PB |
NS |
ZE |
|
PM |
PB |
PM |
PB |
PB |
PB |
ZE |
PS |
|
PB |
PM |
PB |
PB |
PB |
PB |
NB |
NB |
图3.电子差速系统的连接图
图4.右电机模糊逻辑控制器模块的内部视图
图5.电子差速控制系统的MATLAB
全文共9066字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14189],资料为PDF文档或Word文档,PDF文档可免费转换为Word

