
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
传动系统和车辆性能
1.3.4运动与滑角
本节涉及两个有关传动系设计直接相关的侧滑角的车轮运动的问题:
- 车轮的纵向和横向力的相互作用
- 在滑动角alpha;ne;0时,车轮的纵向力与其滚动半径(滑移率)之间的关系。
通常在推导滑动滚轮的数学模型时,只要注意力集中在第一个问题,而对于第二个问题的关注比较少。尽管如此,即使是纵向和横向力之间的相互作用的第一个问题也需要额外的补充。
1.3.4.1 纵向和横向力之间的相互作用
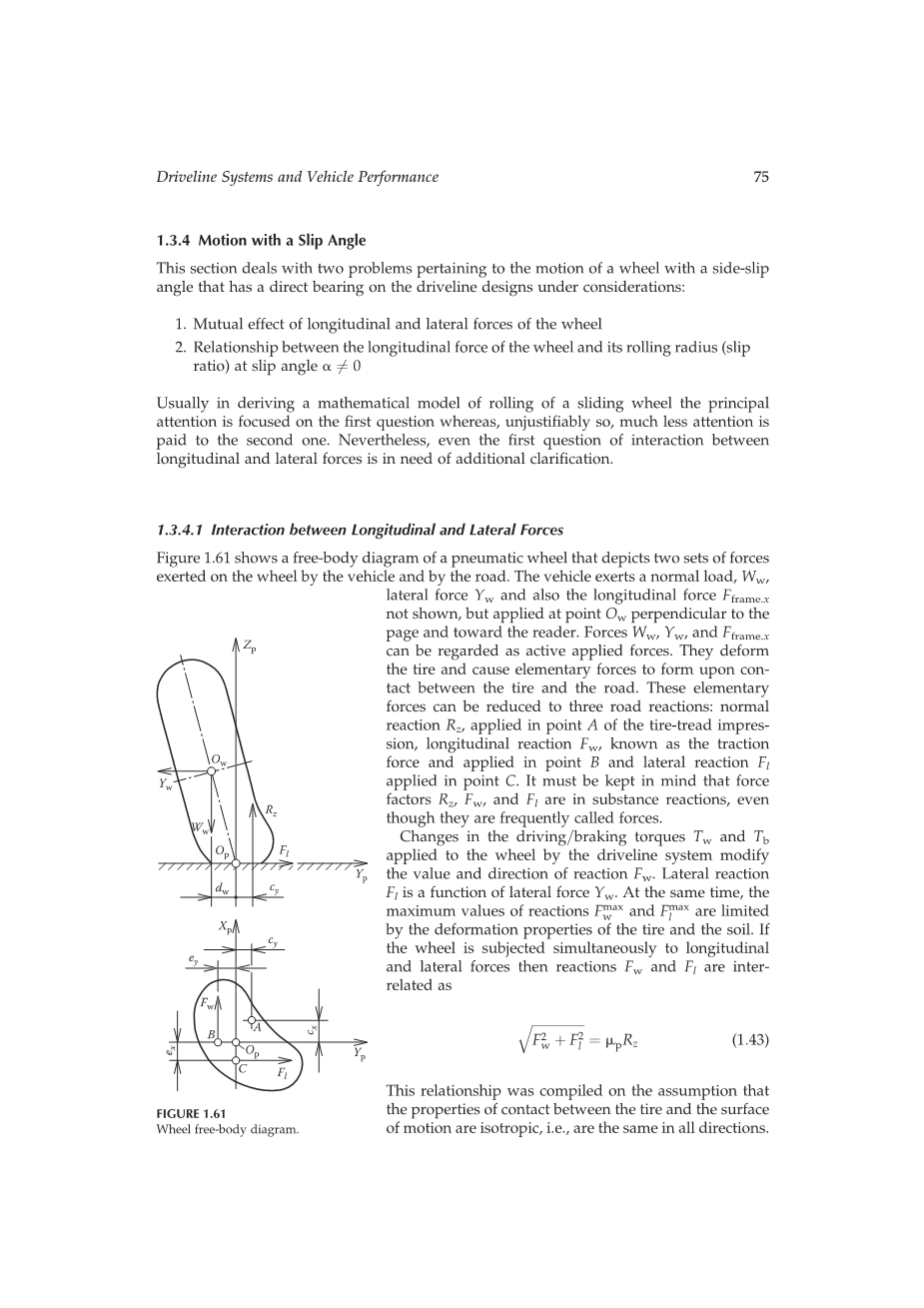
图1.61显示了启动轮的自由体图,描绘了车辆和道路施加在车轮上的两组力。车辆施加正常负载。
其中横向力和纵向力未显示,但是垂直于页面并朝向读者的点Ow处施加,力,,Fframe.x可视为主动作用力。它们使轮胎变形,并在轮胎与道路接触时导致基本力量的形成,这些基本力可以归结为三种道路反力:在轮胎胎面印痕的A点施加的正常反作用力Rz,施加在B点称为牵引力的纵向反作用力Fw,和应用于C点的侧向反作用力Fl,必须记住,力因素Rz,Fw和Fl;在物质反应中,即使它们经常被称为力。
驾驶=由传动系统施加到车轮上的制动力矩Tw和Tb的变化改变了反作用力Fw的值和方向。横向反应Fl是横向力Yw的函数。 与此同时,通过轮胎和土壤的变形特性反应的最大值和是有限的。如果车轮同时受到纵向作用和侧向力,则反应Fw和F1是相互关联的:
这种关系是假定轮胎和运动表面之间的接触性质运动是各向同性的,即在所有方向上都是相同的情况下编制的。
图1.61
车轮自由体图。
从这个假设得出,纵向mu;p和横向mu;l方向的抓地力系数是相同的,即
但实际上,系数mu;p和mu;l可能并不相同,可能以不同的方式相关。通过比较纵向和侧向抓地力系数的值,通常可以看出mu;plt;mu;l。 这两个系数之间的关系在很大程度上取决于在运动表面的类型。
当切向反应Fw随着车轮扭矩Tw的数值增加而增加时,为了满足方程1.43,横向反作用力F1应该减小。 这意味着车轮可以吸收的可用转弯力Yw减小。例如,在高牵引力Fw下,低力侧风的出现,施加的力Yw可能导致车轮在横向上滑动。 这在冰雪路面上加速时尤为明显,不仅是侧风,而且还要滚动到一个小石头(表面不规则)会导致侧滑。这由等式1.43证实:Fl=0在Fw=mu;pRz处,即,车轮不能承受任何横向力Yw。
可以在工程文献找到大量关于车轮的切向力对其承受侧向力的能力的影响的分析结果和实验信息。作为一个例子,Dr.D.A.Antonov开发的非线性横向滑动理论的被称为:
其中横向力Fl是滑移角alpha;的函数; Ky被称为侧向滑移阻力系数(也称为轮胎的转弯刚度),而Ky0是的切线函数Fl=f(a)在坐标原点;prod;9i=1qalpha;i是九个校正因子的乘积,在正常荷载,土壤性质,不规则性,运动表面,车轮对准等发生变化时修正公式1.45。九个部分校正因子之一qaT反映了牵引力Fw的影响。 在车轮接触地面的极限负载的情况下,这个系数从公式1.43确定为力Fw下Ky的值与Fw上的值之比为0
从方程1.46可以看出,当Fw = 0时,车轮的滑动阻力最高。随着外形和力Fw(随着扭矩Tw的增加)的增加,qaT的值在减小,即车轮承受横向力的能力降低。 在 =mu;pRz时,当轮子开始旋转时,qaT = 0。 车轮甚至无法产生横向反作用力,Fl = 0。 因此,即使很小的横向力Yw的出现也会导致车轮滑到一边。
在轮胎与运动表面之间轻微负荷接触的情况下,
校正因子由表达式确定
其中是名义轮胎负载,其中
这意味着驱动=制动力矩Tw和Tb以及纵向力Fw的变化修正了校正因子qaT的值并与在公式1.45中的滑动阻力系数Ky一起修改。即使在铺砌道路上,用于驱动的车轮Ky的值可能比驱动车轮的值低5%-30%。在恒定的车轮横向力下,公式1.45中Ky的减少应导致alpha;的显著增加。由于车辆的曲线运动的性质很大程度上取决于前部(a1)和后部(a2)车轴的滑移角之间的差异,因此系数Ky1和Ky2对转弯车辆的动态变得可以理解。上述材料也说明了传动系统影响车轮侧向力与其滑移角之间的关系的机理。 这个问题将在2.8.3和3.5.2节中进一步阐述。
1.3.4.2侧滑下的车轮运动学和受力因素
1.3.2节研究了平面运动中车轮的运动学参数和力学参数。 在滑移角运动的情况下,这些方程的有效性自然会产生。要解决这个问题,必须说明一下几点:横向滑动对滚动半径r0w在驱动模式下切向的影响,等式1.26中的轮胎的弹性lambda;w和参数mu;px和k。
图1.62显示了没有滑动的从动轮的中心的运动路径AB和AC。 当沿着路径AC移动时(即,以滑移角),车轮中心的基本运动可以视为合成运动沿着道路纵向和横向反应的作用
线。出于这个原因,总行程AC由段AB和BC确定。 如果半径r0w与alpha;无关,则其值r0w从点A到点B无滑移(a = 0)确定应该等于AB段确定r0wa的值,当车轮从A点滑到C点时图1.63显示了在支架上带有转鼓的支架上测试5.00-10轮胎的结果。 以预设角度alpha;进行实验,并且根据行驶距离SAC确定车轮的滚动半径:
其中
SAC=2pi;rrnr
rr是鼓的半径
图1.62
带轮的布局和滑角a。
nr是滚筒在行程SAC上的转数
图1.63
将等式1.49中的ra值乘以cos a,即滚动半径r0wa的值在分段AB的驱动模式下获得。可以看出r0wa偏离r0w不超过1.5%。这个结果,以及对大量实验数据的分析可以得出的结论是横向滑动对驱动模式下的滚轮半径的影响可以忽略不计。
但是,这不适用于轮胎(轮胎和土壤)的切向弹性lambda;w(或gamma;w,见第1.3.2节)。后者的值随着a的增加而高度增加。图1.64显示了计算gamma;wa作为轮胎6.00-16执行的函数的结果。 计算是使用两个不同的公式导出的,博士A. S. Litvinov和Ya. E. Farobin两种方法获得的结果实际都是相同。
由博士 A. S. Litvinov和Ya.E. Farobin可以用于实际计算派生的上述表达式之一。
这里:
图1.64
6.00-16轮胎的纵向弹性。
图1.65
实验结果表明,在恒定的力Fx下,车轮的滑移增加。函数Fx=f(,a)由基本方程1.26和运动表面特性的各向同性假设推导而来:
图1.65显示了公式1.51绘制的曲线。 这些数据与G.Krick的研究论文和其他实验数据的实验结果比较表明:方程1.51对工程计算来说是十分精确的。 请注意在a=0时,方程1.51采用等式1.26的形式,其中Fx和 在没有侧滑时相关。
本节介绍的内容对于动力传动系统对曲线运动中车辆动力学的影响以及车辆的能量效率分析研究具有重要意义。原因如下,当车辆以不同的方式转弯时,不同的传动系统将扭矩分配给驱动轮。出于这个原因,这些车轮依次受到的牵引力也是不同的。这些不同的牵引力也会不同地影响车辆的滑移角和侧向力(见公式1.46和1.48中的符号Fw,它们是方程1.45的组成部分)。这在很大程度上决定了车辆的路径动态。转弯时,车轮的运动参数与力参数的函数关系同时发生改变(见公式1.26,指数不包含a和公式1.51,其中指数包括a)。这是由于轮胎的切向弹性随着a变化而发生改变(见图1.64)。当以滑移角移动时,车轮滑移sdelta;增加导致车轮打滑时消耗的功率Pdelta;增加。这是从以下公式1.19和公式1.34得出的。这最终会降低滑动效率eta;wdelta;,并在最终分析中降低了车轮效率(见公式1.36,1.39和1.40)。传动系统对车轮与支撑表面的相互作用影响的机制的材料和附加允许接下来传动系统影响车辆能量有效性的方式,并在最终分析中,车辆性能。
1.4车辆能量=燃料效率和传动系统设计
行驶中的车辆的车轮驱动能量用于克服各种运动阻力并执行有用的工作。 这种有用的工作在用于不同的车辆中是不同的。根据所执行的有用工作,轮式车辆和其功能模式可分为三组(见表1.19):牵引车辆(牵引工作模式),运输车辆(货物运输模式)和运输牵引(组合)模式。
传动系统和车辆性能
牵引车是那些有用的工作在于克服牵引力的车辆。例如,农用拖拉机(表1.19,位置1)在克服农具的牵引力的情况下进行有效的耕作。运输车辆(表1.19,位置2至4)进行运输乘客和货物(有效载荷),运输货物的卡车和车辆列车也是如此。运输牵引车辆通过运输同时装载货物和牵引力(组合模式)。这方面的一个例子是具有载货平台的车辆,该平台有用于安装农具的装备(表1.19,位置5)。军事卡车配备自动回收绞车功能时运输牵引模式下运行(表1.19,位置5)。
调查车辆能源效率的第一步应该是确定其运作模式。应小心处理操作模式的限制,因为某些车辆可能交替地以多种模式运行。例如,考虑一个单斗装载机,可以在移动时将物料铲入斗中,提高吊杆并旋转铲斗。在这个过程中,装载机克服作用在铲斗边缘的材料的阻力。该阻力的一个组成部分平行于运动表面,是装载机开发的拉杆拉力。积累在铲斗中的物质的质量(有效载荷)同时增加。初看起来,装载机可能在组合模式下进行,但是,这不是因为铲斗在捞起物料的过程中运输桶中的物料不能算是货物。反过来,铲斗中不断增加的材料质量会增加装载机的重量对运动的阻力。当挖掘物料时,装载机在牵引模式下运行。在完成材料的铲取后,装载机将铲斗中的物料运送到卸载点。在这种情况下,装载机在运输模式中运行。
参考其能量和燃料效率的评估,所有三种类型的车辆可以表示为功率消耗箱,输入功率P被称为发动机的指示功率。现在考虑将这种能量运用于车辆在水平表面上的匀速运动,这时候空气阻力可以忽略。这个功率P用于克服机械阻力上(见图1.66)。
这个功率Pax的一部分用于发动机本身的机械损耗中,用于驱动辅助设备和转向控制装置(图1.66中的a框)。机械功率损失Ptrm(图1.66中的方框b)发生在变速器中。另一部分功率消耗在传动系统(方框c)中的机械损失Pdrl中,然后用于使轮胎和土壤变形Pts(方框d)变形。剩余的输出功率Pout被消耗:(1)克服牵引车辆的牵引阻力; (2)运送乘客和运输车辆的货物;和(3)克服牵引阻力并以组合模式运输货物。
图1.66
车辆的功率平衡。
参考图1.66中的命名法,车辆的功率平衡变为
其中
这里Pfsum;是克服所有车轮的滚动阻力所消耗的动力,而Pdelta;sum;是驱动轮打滑时的动力损失。
很明显,车辆的能量和燃料效率在很大程度上由功率比Pout/确定 。 这里感兴趣的项目是影响传动系统对车辆能量/燃料效率的影响。 这种影响体现在图1.66中的框c和d以及公式(1.52)和(1.53)中的组分Pd
全文共9999字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13964],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

