英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
Mechanism
and
Machine Theory
Mechanism and Machine Theory 39 (2004) 603–619
www.elsevier.com/locate/mechmt
Development and validation of a three-dimensional kinematic model for the McPherson steering and suspension mechanisms
麦弗逊式转向悬架机构三维运动学模型的开发与验证
Daniel A. Mantaras a,*, Pablo Luque a, Carlos Vera b
|
a |
||
|
Area de Ingenierıa e Infraestructura de los Transportes, Universidad de Oviedo, Campus de Viesques, |
||
|
s/n, 33203 Gijon, Spain |
||
|
b |
Gutierrez Abascal 2, 28006 Madrid, Spain |
|
|
Area de Ingenierıa Mecanica, Universidad Politecnica de Madrid, Jose |
||
Received 28 January 2003; received in revised form 16 December 2003; accepted 27 December 2003
摘要
本文提出了一种基于麦弗逊式转向悬架的运动学特性的三维模型。提出了一种确定主要参数(后倾角、外倾角、转向角等)的一般方法,这些参数影响着车辆的驾驶,在功能上是影响系统的操作因素。输入的数据一方面是悬架与转向梯形,另一方面是通过对车辆监测所得到的支撑杆和转向方向盘的行程。该模型已应用于标准车辆,并验证了其有效性。
关键词:计算机模拟;汽车悬架,麦弗逊、三维运动学模型
1.介绍
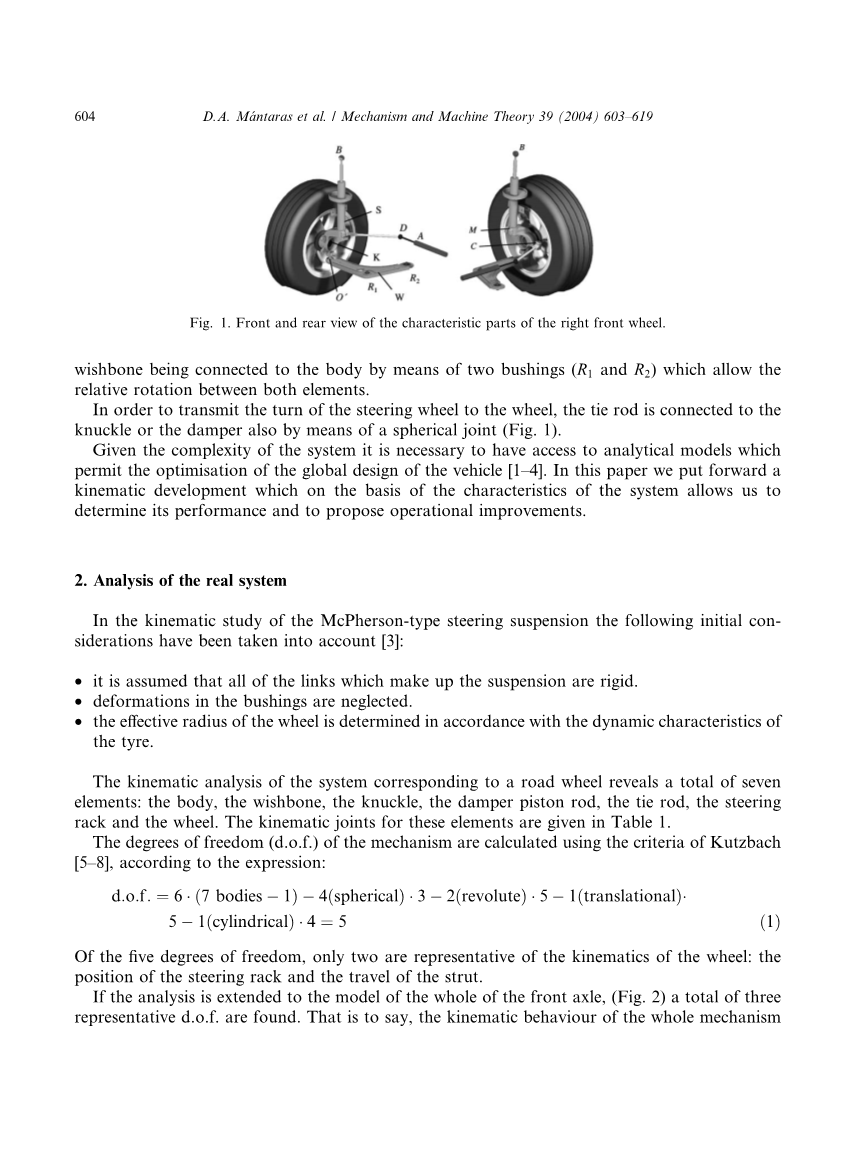
麦弗逊式悬架系统目前广泛应用于各中小型车辆。在最普遍的配置中(图一),该悬架由刚性连接到车轮或转向节(K)的支撑(S)构成。支撑的上部是由弹性元件与推力球轴承组成的柔性接合体连接到车架(B)上的,它能允许支撑杆的旋转
Fig. 1. 前和后视图右前轮的特征部分。
在悬架的下部有一个横摆臂,连接转向节与车架,转向节与横摆臂之间是由球形铰链连接的,横摆臂通过两个衬套连接至车架,允许两个元素之间的旋转。
为了将转向轮的转动传递到车轮上,拉杆通过球形接头连接到转向节或阻尼上。
考虑到系统的复杂性,有必要通过分析模型,从而对车辆的整体设计进行优化[1-4]。在此基础上提出了一种基于系统特性的运动学发展,使我们能够确定其性能,并提出了操作改进的建议。
2. 真实系统的分析
- 在麦弗逊式转向悬架的运动学研究中,需要考虑[3]:
- bull;假定所有构成悬挂的连杆都是刚性的。
- bull;在衬套中变形是被忽略的。
- bull;车轮的有效半径是根据轮胎的动态特性确定的。
该系统的运动学分析表明,该系统与道路轮相对应的系统共有7个要素:车身、叉形杆、转向节、减震器活塞杆、拉杆、转向齿条和车轮。这些元素的运动副在表1中给出。
根据Kutzbach[5-8]的标准,计算出该机构的自由度(d.o.f),其表达式为:
在五个自由度中,只有两个代表车轮运动:转向架的位置和支撑杆的行程。
如果将分析扩展到整个前桥的模型(图2),就会发现总共有三个代表。也就是说,整个系统的运动行为
|
Table 1 |
||||
|
链接和连接它们的连接的摘要。 |
||||
|
Joint |
d.o.f. |
Elements related by kinematic joints |
||
|
Revolute |
1 |
O |
Body–wishbone |
|
|
Spherical |
3 |
O0 |
Wishbone–strut–knuckle |
|
|
Spherical |
3 |
C |
Steering tie rod–strut–knuckle |
|
|
Revolute |
1 |
OR |
Wheel–strut–knuckle |
|
|
Spherical |
3 |
D |
Steering rod–steering rack |
|
|
Translational |
1 |
A |
Steering rack–body |
|
|
Cylindrical |
2 |
B–M |
Piston rod–damper tube |
|
|
Spherical |
3 |
B |
Body–McPherson strut |
|
Fig. 2. 麦弗逊悬架和齿条-齿轮转向的运动学模型。.
可以通过对三个变量的评价来找到,即转向架的位置(方向盘上的动作)和麦弗逊支柱的行程。
方向盘,也就是说车的位移,由车辆的司机直接控制,而悬架的位移取决于动态运动、吸收震荡的特性和弹性悬架的元素以及悬架的几何形状等等。这些变量很容易被线性或角位移电子车辆检测传感器测量。
3. 参考框架
每一个车轮(图3)考虑一个参考框架(移动),再加上一个总体的参考框架(不动或惯性)。
车辆的参考框架在车辆本身的重心处有其原点,并遵循ISO 8855(图3)所提出的符号。
606 D.A. Mantaras et al. / Mechanism and Machine Theory 39 (2004) 603–619
Fig. 3. Front wheel and vehicle (ISO 8855) reference frames.
可移动的参考框架Oxyz被定义为与strut-knuckle相连接的系统,与由点M和b定义的阻尼轴相吻合。Oxy平面由点C定义,而Oxy轴由点O和C定义。
在空间中悬架的位置和方向可以通过定位固定的Oz框架的原点来定义,并指定一个正交方向余弦矩阵来定义Oz坐标系的方向[9]。从可动参考系、系统Oxyz到车辆车架的坐标变换矩阵如下:
其中,矩阵[B]是三维方向的函数,而fOV O“g是从OV到O的向量”。坐标的变化是:
逆变换矩阵为:
矩阵[B]是用欧拉参数定义的,它消除了其他常用角坐标如欧拉角的缺点,在许多情况下,可以大大简化数学公式[10-12]。
欧拉定理说:如果两个右笛卡尔坐标系的原点重合,那么它们可能是由某个轴(~w)的一个旋转(v)引起的。因此,变换矩阵的表达式为欧拉参数的形式为:
e0、e1、e2、e3为欧拉参数,定义为:
4.运动学模型的方法
采用三维约束方程对可动参照系的原点位置的三维约束方程[9,13],点O,确定了各轮的运动方程和转向轮的旋转运动方程。确定了这些点和欧拉参数后,确定了车轮平面及其方向向量,使我们可以计算转向和悬架几何。
假设转向和悬架系统的几何参数、特征点的坐标和元素的尺寸是已知的。还假设与自由度相关的变量的值,阻尼器的行程和方向盘的转动,可以在一个真实的情况下测量。
4.1. 叉骨约束方程
叉骨被假定为一个转动球形的复合关节(图4)。
它的解析定义是O和O之间的距离等于叉骨。
半径与向量是正交的:
Fig. 4. Revolute–spherical composite joint.
其中,strut-fixed Oxyz框的原点和欧拉参数的分量为未知量。(xo,yo,zo)点Oxyz O”的组件框架(固定值)。
同理,Eq.(8)将是:
其中a1, a2, a3是向量的方向余弦(固定值)- uw,叉形杆的枢轴。
4.2.操纵杆约束方程
将转向杆假设为球形球形复合接头。它的分析定义是点C和D之间的距离等于杆长(Rs)(图5)。
Fig. 5. Spherical–spherical composite joint.
|
|
将Eq.(13)代入Eq.(12)并进行扩展,得到如下表达式
(xC;yCzc)是在Oxyz点C的组件框架(固定值)。(xDyD;zD)的组件点D参考系的车辆。这些部件的价值取决于方向盘的位置,这是两个自由度之一。
4.3. 支撑约束方程s
支撑连接的解析定义是,点B与O之间的距离等于一个与时间相关的长度(Lst),由点B和O定义的向量正交于~x和~y(图6)。
点之间的距离B和O(Lst)是两个自由度,可以测量位置传感器的实际情况。
支撑运动学模型的约束方程可以写成:
Fig. 6. Strut joint.
扩大方程式(15)-(17)得到下列表达式((19)- (21):
|
4.4. 麦弗逊运动学模型的约束方程。 |
||
|
每个轮的约束方程系统为: |
其中Upe为欧拉参数归一化约束。
|
一旦方程组(22)被解出以下变量,因此。 第3节所述的坐标变换矩阵已知:
|
|
用迭代牛顿- raphson方法求解方程组
5. 运动学模型的应用
5.1. 车轮的空间定位——悬架几何。
一旦确定了可动参考系的位置和方向,就可以得到车轮平面的方向向量(24)。这将与车轮的自旋轴平行(图7),并允许确定悬挂系统
全文共10630字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13854],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

