
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于声学模式的尾门控制系统
摘要
当顾客使用尾门(或后备箱)时,为了提高便利性,已经引入并实施了一些系统,例如电动尾门系统和智能尾门系统。但是,在某些使用情况下,它们仍然存在一些问题。有些人不得不去寻找外部按钮来打开尾门,或者他们需要拿出钥匙并按下按钮。在某些情况下,他们需要走动或等待几秒钟,这使得一些人觉得这是一段很长的时间。 此外,他们必须推动位于内饰板上的小按钮以关闭后挡板。这篇文章提出了一种基于声学模式的新型尾门控制技术和系统,以解决一些不便之处。 声学用户交互(AUI)是一种响应人类在分析声学模式的特定部分上摩擦和敲击的技术。AUI最近在汽车行业以及家用电器,移动设备,乐器等领域受到关注.AUI是一项技术,可以延伸到超越多点触控的丰富触控技术。即使是需要较大触摸识别区域或具有复杂形状和表面的系统,AUI也可以轻松应用和调整。本文讨论如何识别用户的意图以及如何使用声学传感器和图案来控制尾门。 如果有智能钥匙的人想打开尾门,他只需要敲两次后挡板的外板。当他们想要关闭后挡板时,只需触碰后挡板内饰的任何位置即可。用于声学信号处理的有各种数字滤波器和算法,并且所提出的方法的有效性通过具有微控制单元的实际尾门系统示出。最后,我们建议车辆的其他应用也使用AUI技术。
引言
车辆使用者希望能够在想要打开或关闭汽车后备箱盖的正确时刻控制车辆。尾门上有一个门锁系统用于防盗和安全。所以我们必须通过按下智能钥匙或后备箱中的单独按钮来开锁。许多汽车公司尝试了各种技术,以改善便利的操作,同时保持汽车后备箱的稳定性。为了实现这一目标,一些公司采用了由电机驱动的电动尾门系统来实现自动打开和关闭。此外,汽车制造商已经推出了免提升降门系统,该系统通过只需用脚踢在后保险杠下方,从而打开尾门。另一家汽车制造商已经提出了智能尾门系统,当用户在车辆后部一米内拿着接近式智能钥匙站立超过三秒钟时,后备箱盖可以自动操作。
自引入电动尾门系统后,打开或关闭尾门的便利性大大提高。但仍然需要在外面板或内饰上使用按钮或开关来传达确切的用户意图。用户在找到肮脏的后挡板上的手柄开关的过程中会感到不适。但是有时他们会遇到后挡板不知不觉地关闭这种情况,需要紧急找到内部按钮来停止后挡板。有人需要在汽车后部笨拙地走动,或者有些人需要站立超过三秒钟,这可能对有些人而言是一段很长的时间。为了解决这些问题,本文提出了一种基于声学模式的新型尾门系统,同时辅助传统的尾门功能。
近来已经引入了各种能够识别声波的人体触摸和控制车辆系统的方法。声学用户界面(AUI)可以为用户提供超越多点触控的丰富触摸体验。 AUI可用于IT设备执行特殊功能,AUI也可用于分析人体振动从而控制可穿戴设备。另外,与其他触摸技术相比,AUI可以应用于各种媒体。因此,AUI被认为是一种新颖的触摸技术,它也可用于广泛和复杂的系统表面。
本文介绍的是一种利用声波和模式技术识别用户意图并控制汽车尾门的系统。系统可以通过识别面板或装饰件振动特征的输入模式来控制尾门。当使用者想要打开被锁上的尾门时,只需要使用者在后挡板的外板上轻击两次,后挡板就可以立即打开。另一方面,如果使用者想要关闭后挡板,使用者只需要轻轻敲击后挡板的内饰板,此时后挡板将立即关闭。如果想让后挡板移动,就在内饰上敲击一次。
AUI尾门系统开发的目的在第一部分中讨论。所提出的系统和方法的整体结构在第二部分中描述。在以下章节中,将介绍信号转换的基本原理,模式识别和实现过程。最后,通过实践,使用真实的尾门系统来展示所提出的系统和算法的可行性。
开发目的
基于尾门系统的声学用户界面的开发目标如下:
bull;通过直观的行为识别提高客户的便利性
bull;用低廉的零件确保价格竞争力
bull;确保系统稳定性,同时保留预装电源后挡板的功能。
bull;通过独家技术增强有差异的市场性
bull;模块化系统可在各种其他汽车系统中快速应用
系统配置和操作
图一:AUI尾门控制器的整体硬件结构
图1显示了该系统的总体结构。Cortex-M4用于微控制器(MCU)的核心,运行时钟速度为100MHz。该系统的电源是汽车的主电源,因此需要监控主电源的电压。当系统通过DC-DC转换器检测到10V以下的主电源的低电压电平时,可以进入掉电模式。正常情况下,大约有30mA的电流消耗,但在掉电模式下消耗大约6uA的电流。
MEMS MIC(微机-电系统麦克风)用于声学传感器,并且使用两个MIC;一个用于外部面板,另一个用于内部装饰。接收到的声音信号经过MIC转换并输出到PDM(脉冲密度调制)信号。 MCU通过MCU的两个SPI端口接收PDM信号,并通过MCU中的传输功能将其转换为PCM(脉码调制)信号。下面将介绍将PDM转换为PCM的过程。
运行在MCU中的模式识别逻辑可以区分输入是由人为原因还是其他原因造成的。模式识别逻辑可以找出声音信号中的特定模式和特征。当确定是有人故意发出一些声音信号或振动时,MCU将生成外部面板的手柄开关信号或者与识别的输入模式相对应的内部微调的按钮信号。一个UART(通用异步接收器/发送器)端口用于监视MCU的状态或来自MIC的信号。
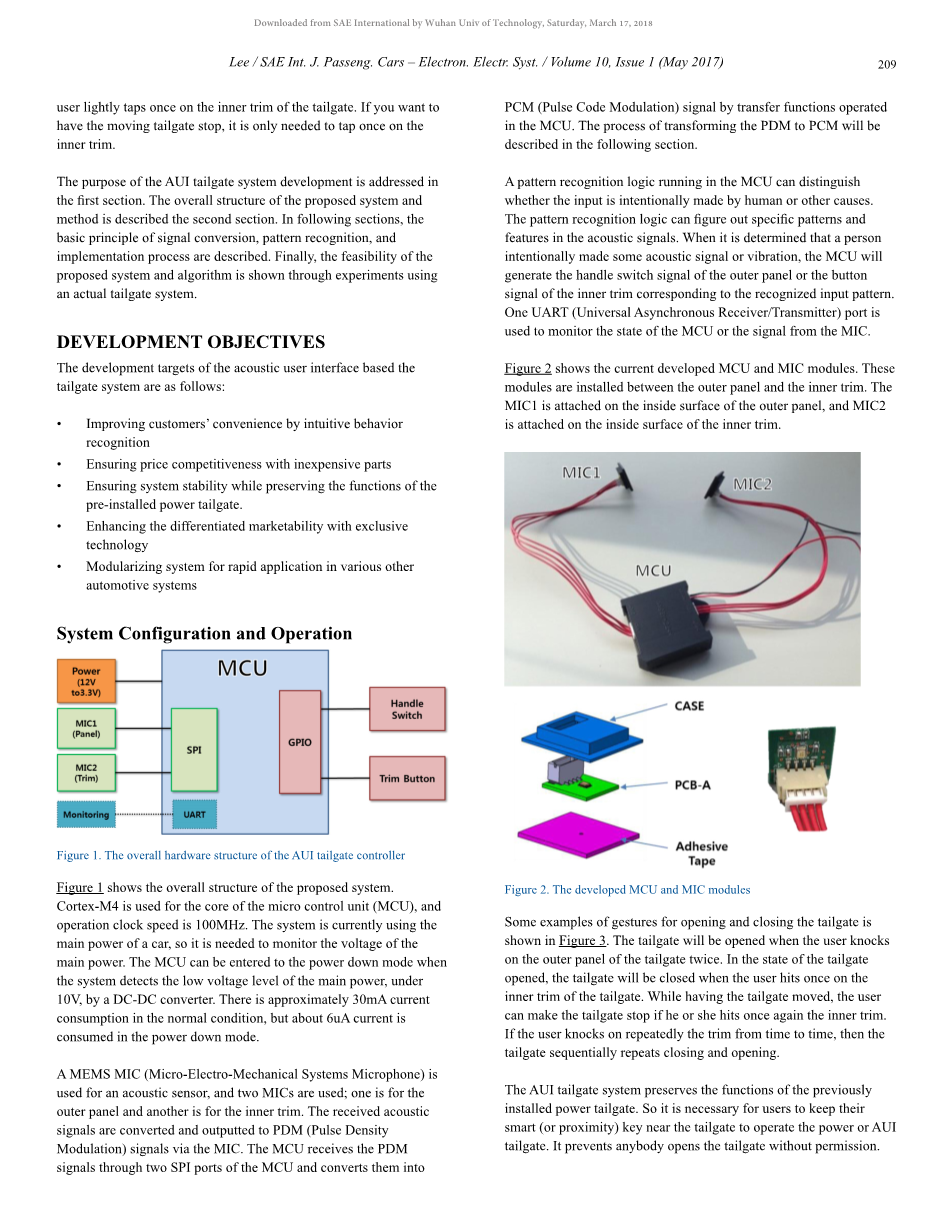
图2展示了当前开发的MCU和MIC模块。这些模块安装在外部面板和内部装饰之间。 MIC1安装在外面板的内表面上,MIC2安装在内饰板的内表面上。
图3:开发的MCU和MIC模块
图3中示出了打开和关闭后挡板的一些手势示例。当用户敲击后备箱盖的外板两次时,后备箱盖将被打开。在后备箱盖打开的状态下,当使用者第一次碰到后备箱盖的内部装饰时,后备箱盖将关闭。当后备箱盖移动时,如果用户再次击中内饰,后备箱盖将停止运动。如果用户不时重复敲击,则尾门依次重复关闭和打开。
AUI后挡板系统保留了以前安装的电动挡板的功能。所以用户必须将他们的智能钥匙放在尾门附近以操作电源或AUI尾门。它可以防止任何人未经许可打开尾门。
图三:敲打手势打开或关闭尾门
从PDM信号转换为PCM
由于数字MIC对电磁噪声而言比较稳定,所以MEMS MIC而不是传统的用于声学传感器的模拟MIC被选为数字MIC。当使用者敲击面板或边缘时,会引起材料的振动,而振动的波会通过介质,面板或边缘传播。声波在刚性材料中比在空气中传播更快并且衰减更小。传播的波会通过MEMS MIC内的隔膜(一种隔膜)转换成电信号。然后通过MEMS MIC内的ASIC将电声信号再次转换成PDM信号。 PDM信号可以以1位数字信号传输,因此传输线只需要信号线和同步所需的时钟线。当然,这两条电源线是运行所必需的。通过等式(1)将声信号转换成PDM信号。如果当前的x[n]大于前面的差e[n-1],那么y[n]的结果将为1。否则,它将是0。
PDM信号由MCU的一个SPI端口传输,如图1所示。展示了AUI尾门控制器的整体硬件结构。声音信号的采样频率为16KHz,MIC的时钟频率为1.024MHz,因为抽取因子为64。与1.024MHz时钟同步的1位PDM信号被传送到MCU并按顺序存储到32位缓冲区位。当存储数据的数量超过32时,计算平均比特值。平均值按顺序记录到特定的存储器中。然后,在存储到20ms的数据的时候,通过IIR BPF(无限脉冲响应带通滤波器),信号的带宽变为存储信号的一半。之后,最终数据可以通过FIR BPF(有限冲激响应带通滤波器)和抽取滤波器获得。最后的数据在PCM的32位浮点数中显示,信号的幅度可以通过滤波器的参数进行调整。从PDM到PCM的整个过程如图4所示。
图4:从PDM到PCM的转换过程
声学模式识别的过程和方法
算法的总体结构
图5:声学模式识别过程
图5表示了确定输入信号是由用户产生还是使用转换PCM产生的整个过程。MCU开始工作后,声音信号实时输入并以16KHz采样频率处理。分段功率每20ms测量一次,当分段功率值高于预定值时可以检测到一些事件。根据以前的研究,20ms的时间是监测声能变化的合适的时间。如果人类能够产生的最快的频率大约是10Hz(时间为100ms),那么20ms的单位可以有效地检测脉冲输入。
首先,在检测到事件后,需要确定事件产生的原因。为避免无意中打开封闭的尾门,用户必须以特定的节奏模式敲击尾门。用户需要敲击后挡板两次,两次输入的间隙必须在250ms到500ms之间,这样后挡板才会打开。
有必要去记录输入事件的数量和差距,以防止一些噪音(例如持续的外部撞击,刺耳的雨水和洗车等)对结果造成故影响。记录输入事件的数量和每个事件之间的间隔,从上次事件发生起,过了Tmax时间的时候,它将通过模式识别过程。Tmax越多,越能更好地区分连续敲击与想要的输入,但会降低系统的响应速度。优化的Tmax目前在500ms。
经过Tmax后,根据输入的数量和间隙,以及两个输入通道的功率之间的差异,可以计算出外部面板或内饰是否发生爆震现象。系统可以根据这些信息滤除噪音输入。最后,系统可以在产生的控制信号到达尾门之前通过模式分类器识别输入的信号。模式分类器可以识别正确的输入并避免其他信号的输入。它可以帮助我们操作尾门,当我们不操作的时候,它也可以防止尾门故障。
MCU将产生一个与正确的输入相关的控制信号,尾门将根据输入模式和当前尾门状况进行开启或关闭。但是,当汽车行驶时以及智能钥匙不在汽车附近时,所有输入信号都将被忽略。在这些情况下,即使使用尾门开关或按钮,电动尾门系统也不会做出任何响应。
声学节奏模式识别
a:输入通道的信号波形
b:每个通道的信号功率
图6:每个通道的输入信号和功率曲线Ch1和Ch2约为27s。
图6显示了为了证明所提出的声学模式识别算法而人为制造的大约27秒的声学输入信号。如果输入功率大于预定阀值,那么输入被检测为事件。在本例中,阈值为10。Ch1的信号用于外部面板,Ch2的信号用于内饰。对于外部面板,事件在持续两次事件发生时被识别为正确的输入。对于内饰,一个敲击足以被识别为正确的输入。为了打开封闭的尾门,用户必须敲击两次外部面板,间隔应该在250ms到500ms之间。当然,Ch1信号的总能量必须大于Ch2信号的能量。数量超过三倍的输入应视为噪声。
图7:节奏模式分类结果
表1:节奏模式分类的条件
识别结果如图7所示。表1中描述了对Ch1和Ch2进行分类的条件。不符合该条件的信号将被视为噪声。声学模式的类别由等式(2)确定并对应于y(N)。
如果将事件划分的最大时间假定为Tmax,则将T除以Tmax得到的时隙数量为K,然后可以通过Tmax和K确定Delta;T。向量x是关于碰撞之间的间隙的信息,并且x由等式(3)决定。
检测为噪音的分析如下。
(请参考图6和图7中的①〜⑤)
①来自Ch1的敲击次数是3次,输出的结果是错的。
②来自Ch1的敲击发生多次,超过两次。
③来自Ch1的输入的第二次敲击的能量水平低于阈值10。
④,⑤来自Ch2的敲击发生多次,超过两次。
结果证明,该算法对于检测有声学模式的识别和滤除噪声是有效的。
图8:来自外板(Ch1)和内板(Ch2)的MIC输入信号
图9:外板(Ch1)和内板(Ch2)的声信号功率
图10:节奏模式识别的结果
实际尾门系统的试验结果
图8,9显示了输入信号和电流,这些输入信号和电流由各种敲击模式和外部噪音产生。尾门上带有两个MIC。实验的顺序如下:
1.3秒后打开点火开关。
2.在车外发出大声的声音和鼓掌。(从4秒到10秒)
3.敲击外面板两次。(约11秒)
4.锁闩被释放,尾门打开。(大约12s)
5.敲击打开的尾门的内部时,尾门开始关闭。(大约16s)
6.敲击内饰时,尾门的关闭进程停止。(大约18秒)
7.重复四次打开和关闭前门以产生噪音(从22秒到28秒)
8.敲击内饰来打开尾门(大约30s)
9.敲击内饰来关闭尾门(约31秒)
10.尾门完全关闭并锁定。 (约35秒)
11.操作后尾门上的雨刮器(从36s到41s)
12.用水射击车辆外部来模拟下雨的情况(从41s到46s)
13.将高尔夫球投掷到车辆上来模拟一些物体撞击在车辆上的情况。
识别结果如图10所示。系统可识别并对预期输入做出反应(图8中的红色箭头和图8中的(a)至(e))。例如关闭前门,操作雨刮器和扔一些物体等其他输入,尾门没有作出任何反应。在本实验中时间功率超过50才能检测到事件。基于实验,Ch2的时间功率是内部功率的1.3倍,当Ch2的时间功率具有时间功率时,可以检测到Ch2和Ch2输入是外部力量Ch1的1.5倍。在其他输入事件中,系统会将它们视为噪音。最后,根据识别结果,外部开关或内部按钮的控制信号将产生300ms,以便打开或关闭尾门。其他造成输入故障的因素将被视为噪音。
- 由于MIC被附着在外面板和内饰板的表面上,所以空气中的噪声不会造成任何影响。
- 由于Ch1和Ch2之间只有一次敲击和完全不同的功率,锁闩的释放声音被识别为噪音。
-
前门关门声
全文共8560字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13684],资料为PDF文档或Word文档,PDF文档可免费转换为Word

