
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
用线控系统对制动器摩擦制动力矩的建模与估计
Clara Marina Martiacute;nez, Efstathios Velenis, and Davide Tavernini Centre for Automotive Engineering Cranfield University Cranfield, UK clara.marina.mz@gmail.com; e.velenis@cranfield.ac.uk; d.tavernini@cranfield.ac.uk
Bo Gao, and Matthias Wellers AVL Powertrain UK Ltd Basildon, UK Bo.Gao@avl.com; matthias.wellers@avl.com
摘要:近年来汽车工业的发展使汽车电气化技术成为最新的技术,其目的是减少燃料消耗,减少污染物排放,提高车辆的性能和安全性。因此,电动汽车(EV)和混合动力汽车(HEV)已经成为未来汽车的未来,在汽车系统的整合和控制中面临着重要的挑战。在这些车辆中,再生制动是目前能量回收的主要技术,对制动力矩的应用提供精确的控制。然而,再生式制动器仍然需要传统摩擦刹车的支持,主要是由于电池的限制。因此,两种制动策略的协调对于制动相关系统的安全驱动至关重要,例如:ABS和ESP。但是,由于不同的系统输入,摩擦和再生制动器之间的扭矩混合是一个复杂的任务; 回馈制动装置接收扭矩输入,同时摩擦制动器使用压力输入。本文提出了摩擦制动力矩的估计,简化了扭矩的混合,改善了能量回收和行车安全。制动力矩的估算不仅考虑了卡钳的压力,还考虑了制动盘的温度,以及车轮对摩擦系数的影响。考虑到只有轮速传感器是可用的,在汽车平台上没有安装额外的传感器就能获得扭矩。评估是使用卡尔曼滤波器的扩展版本来执行的。得到的结果非常令人满意,并能以安全的方式提高系统的性能。
关键词:刹车线;水力模型;纵向动力学;LuGre模型;Pacejka模型;制动盘温度;制动转矩;卡尔曼滤波器
一、引言
严格的排放法规和高要求的市场正在推动汽车工业进入电动汽车和混合动力汽车时代。与传统车辆相比,这些车辆的集成程度非常高,并且包括诸如电动液压制动系统(EHB)之类的x - by - wire解决方案。然而,混合动力汽车,尤其是电动汽车在储能能力和充电时间方面都有一个重要的限制。回馈制动是主要的能量回收工具,以增加电动范围。然而,回馈式制动器需要通过摩擦刹车来支撑;主要是由于电池的限制。EHB允许两种制动方式之间的无缝协调,而不需要驾驶员的确认;踩踏板的感觉独立于液压变化或回馈机制[1]。当系统的驱动反馈得到保证时,主要的难题是实现摩擦和再生制动之间的最佳扭矩。这一阶段的主要困难是系统输入;反馈制动器接收扭矩输入,而摩擦制动器使用压力输入。由于传感器的成本和周围的情况,摩擦制动扭矩不能直接测量,使刹车协调变得复杂。因此,在安全关键事件中,反馈作用被最小化,导致能量的回复并不理想[1]。
虽然直接测量摩擦制动力矩是不可行的,但可以用一种捕获主系统动态特性的制动系统模型来估计。在模拟阀门反应时,通常以一阶的时间延迟来模拟一阶系统的井径压力[2]。更复杂的方法是通过一种二次关系或二级系统,将压力的下降量与阀门上的流量相对应[3][4]。
假设为恒定的摩擦系数,在文献中通常使用测径压力来计算制动转矩[3]。然而,由于表面温度和滑移速度对摩擦系数的影响很大,这种方法可能不够准确[5][6]。相关实验结果表明,对于刹车时,要使用更为复杂的模型如LuGre[12]。车轮速度依赖还需要一个纵向动力学模型,将发动机和制动力矩与牵引力和电阻相联系[8]。制动力矩与纵向动力学之间的关系是由轮胎模型得来的。特别是Pacejka的公式[9]已经被广泛的使用,因为它用于模拟目的的适宜性和令人满意的结果。
本文介绍了一种特定EHB的液压制动模型。它与制动盘温度模型相结合,在阀瓣接触面提供瞬时压力和温度。最后,还涵盖了车辆的纵向动力学,因此可以通过车轮的速度(接触面的滑动速度),来获得瞬时制动扭矩。该模型能够模拟不同的加速度和制动情境,并作为制动力矩估计的基础。用一个经过验证的液压模型获得了井径压力,卡尔曼滤波器的扩展版本用于估计温度的数值。评价结果与文献方法进行了比较。
二、系统建模
本文主要采用两种不同的方法计算了制动力矩;车辆纵向动力学和制动动力学(压力和摩擦系数)。第一个考虑变量如发动机转矩、轮速和滑移比已知或可以估计,因此可以使用以下方程得到制动转矩[8]:
J·d/dt=--· (1)其中J和分别是车轮和有效轮半径的旋转元素的惯量,、、、这些变量分别代表轮速、发动机扭矩、牵引力和制动力矩。
由于在这个方程中估计的变量数目众多,第二种方法得到了更广泛的应用。它简化了与井径压力成比例关系的转矩计算;因此,考虑常数的其余参数[3]:
= -2· · A·· (2)其中A、、分别为有效垫面积、摩擦系数、应用半径,代表钳压。
虽然第一个方法依赖于几个估计的变量,但是第二个方法使用了一个相当简化的系统。此外,摩擦系数随外界条件的变化而变化,压力也不能被测量。因此,结果的准确性是无法保证的。以下几节结合前面的方法,包括主要的制动动力学,以获得更精确的制动力矩值。
1.液压制动系统
模拟的液压系统相当于现有的EHB。它由Bosch提供,并提供Sensotronic制动控制(SBC)。SBC计算使用制动踏板位置传感器所需要的压力。压力储存在蓄能器中,该蓄能器准备好几个制动机动,140-160bar。制动踏板响应连接到一个液压踏板模拟器。
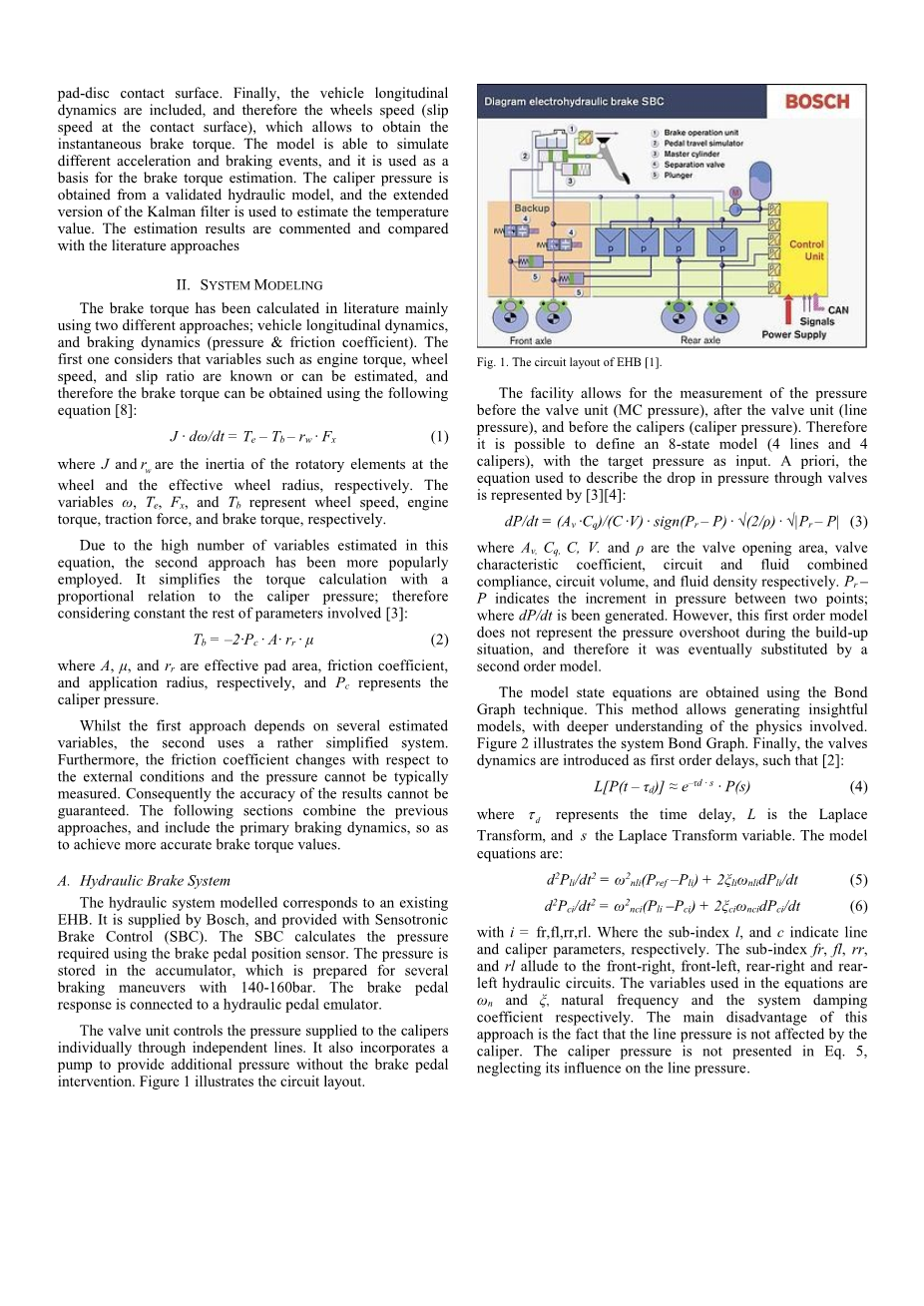
阀门单元通过独立的线路控制向卡钳提供的压力。它还包括一个泵,提供额外的压力,没有刹车踏板的干预。图1表示电路的布局。
控制单元
图1 EHB的电路布局[1]
该装置允许测量阀门单元(MC压力)之前的压力,在阀门单元(管路压力)之后与卡钳(卡钳压力)之前。因此可以定义一个8-state模型(4线和4卡尺),以目标压力作为输入。一种用来描述活塞压降的方程是由下所示[3][4]:
dP/dt = (Av ·Cq)/(C·V)· sign(Pr – P)· radic;(2/rho;)· radic;|Pr – P| (3)
其中,Av、Cq、C、v和分别是阀门的开孔面积、阀门特性系数、电路和流体的合规性、电路体积和流体密度。Pr - P表示两个点之间的压力增量dP/dt。然而,这一阶模型并不代表在累积情况下的压力过大,因此它最终被二阶模型所取代。
利用键合图技术得到了模型状态方程。这种方法允许产生有洞察力的模型,对涉及的物理有更深的理解。图2为系统键图。最后,将阀门动态特性作为一阶延时引入,如[2]:
L[P(t-)]·P(s) (4)
其中d表示时间延迟,L是拉普拉斯变换,s是拉普拉斯变换变量。该模型方程式为:
/d(-) 2d/dt (5)
/d(-) 2d/dt (6)
其中分类指数l和c分别表示线和井径参数。分指标fr、fl、rr和rl指前端、前左、后右和后左液压回路。方程中使用的变量分别为n和,自然频率和系统阻尼系数。这种方法的主要缺点是线路压力不受钳体的影响。没有给出钳体压力,忽略了它对管路压力的影响。
图2 液压系统键合图模型
2.碟形散热
在制动过程中,车辆动能消散为热。因此,盘垫接触表面可以达到500以上的温度[10]。根据研究[5][6],摩擦系数可以在这些温度范围之间发生较大的变化。因此,重要的是引入温度依赖关系,以提供对瞬时值的良好估计。
温度模型假设产生的热量完全被圆盘吸收和消散;主要是由于它的质量和导热系数比较高[10]。热系数的值是从[11]的实验数据得到的。热耗散的公式如下:
d/dt=(P)·∆T=(x(P)k (7)
d/dt=(omega;)·∆T (8)
d/dt=sigma;ε() (9)
其中k,sigma;,ε,分别为导热系数、玻耳兹曼常数、表面发射率和环境温度。A和l是受每一种传热方式的面积和长度。x(P)为压力相关,h是传热系数,T表明表面交换热量之间的温差,dQ / dt是热功率转移。热量通过传导进入车轮载体,通过对流进入空气,并辐射到周围的表面。
每个制动盘的微分方程可以简化为:
· m · dT/dt = d/dt – d/dt (10)
其中d/dt、d/dt是制动过程中阀瓣吸收的总热量与耗散的总热量。m是这种情况下的制动盘质量,Cp是它的热容[10]。假设所有的能量消散成热,omega;是车轮速度,方程所产生的热量可以被定义为:
d/dt=·omega; (11)
3.摩擦系数
摩擦接触的描述是使用简化版本的LuGre模型[12]。假设摩擦动力学与其他模型(tire-road动力学)相比是快速的,因此对于整体精度来说并不重要。修正方程忽略了内部动力学,用稳态条件代替了状态。该模型还能补偿温度和正常的力变化。因此,得到了一个考虑对摩擦系数最重要贡献的静态模型[7]:
=[]x(T) (12)
其中、、、beta;和均为常量,分别为库仑力,阻力,粘滞速度,alpha;系数和粘性摩擦。这些参数是从[5][6]中得到的,汽车摩擦材料在不同情况下进行了测试。但是,应该注意的是,这些信息可能不足以确定参数的准确值。因此,对结果的解释必须是定性的,而不是严格定量的。
4.车辆纵向动力学
这是一个纯粹的纵向动力学的模型,没有考虑到转弯的力。轮胎的接触特性是用Pacejka的方程,和最初的参数[9]来决定的。假设车辆行驶在完全平坦的道路上,唯一考虑的阻力是:滚动阻力(Rr)和空气阻力(Ra) [3][8][13]。该模型方程如下:
·domega;/dti =--· (13)
m·dv/dt == (14)
=·A·rho;·/2 (15)
=f·m·g (16)
= D · sin[C · arctan{B · x – E · (B · x – arctan(B · x))}] (17)
i = rr, rl, fr, fl。
其中、A、rho;、f、m、g和x分别为空气动力系数、车辆正面面积、空气密度、滚动系数、车辆质量、重力、轮胎的法向力、纵向滑移比。在这些方程式中,v代表车速。在前后车轴上,车轮转速被认为是恒定的;车自行车模型。B、C、D和E是原始的Pacejka公式参数,依赖于每个轮胎的法向力Fz[9]。图3表示了公式(13)和(14)的受力图。
采用一种俯仰运动模型,得到了Pacejka公式中用于计算模型参数的法向力。所考虑的自由度;车辆垂直运动(x)、俯仰角度(theta;)和前后轴的垂直运动(xf, xr)。参考点位于平衡条件下:
m·x / d= 2 (x - theta;)- 2 c(dx / dt - d / dt dtheta;/ dt)-2 (x - -theta;)- 2 c(dx / dt - d / dt - dtheta;/ dt) (18)
I ·theta;/d= m · ( ·x/d h · y/d ) 2( ) · [· (x –-theta;) – c · (dx/dt –d / dt - dtheta;/ dt)] (19)
/d = · (x –-theta;) c · (dx/dt –d / dt - dtheta;/ dt) – (20)
/d =· (x –-theta;) c · (dx/dt –d / dt - dtheta;/ dt) – (21)
m·g·/(); i=r,f; j=f,r (22)
其中k、c、、
全文共11055字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13054],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

