英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
轿车电动助力转向系统建模与仿真研究
王健鹏 东风汽车公司技术中心
2016年4月5日出版
摘要:为拓展电动助力转向系统的产品设计和开发能力,将建立一个与EPS系统模型相结合的客车仿真模型。本文进行了一些分析研究。通过简化EPS系统的结构模型,描述了转向轮和圆柱、蜗轮减速器、齿条和小齿轮、转向轮、刷直流电机、ECU辅助和补偿规律的数学方程表达式。对EPS全系统和子系统和组件的一些测试将被执行。考试的结果将被用来作为模型的输入参数,然后被用于模型验证。之后,将创建EPS系统模型。由于控制逻辑策略中最重要的部分是转向装配供应商的最高机密,它不能直接提供给OEM,甚至不能直接使用黑盒模型。因此,本文将开发一个基于测试数据的查表控制器模型。在对EPS模型进行验证后,建立了与之相适应的底盘模型,其中悬架特性是由K/C试验台产生的。综合底盘模型将通过几种典型的操纵操作进行验证,这些操作侧重于客观评价和主观评价。下面的灵敏度分析将找出控制器参数对操作性能和驾驶感觉的影响。
关键词:电动助力转向系统、控制补偿、模型的验证、敏感性分析
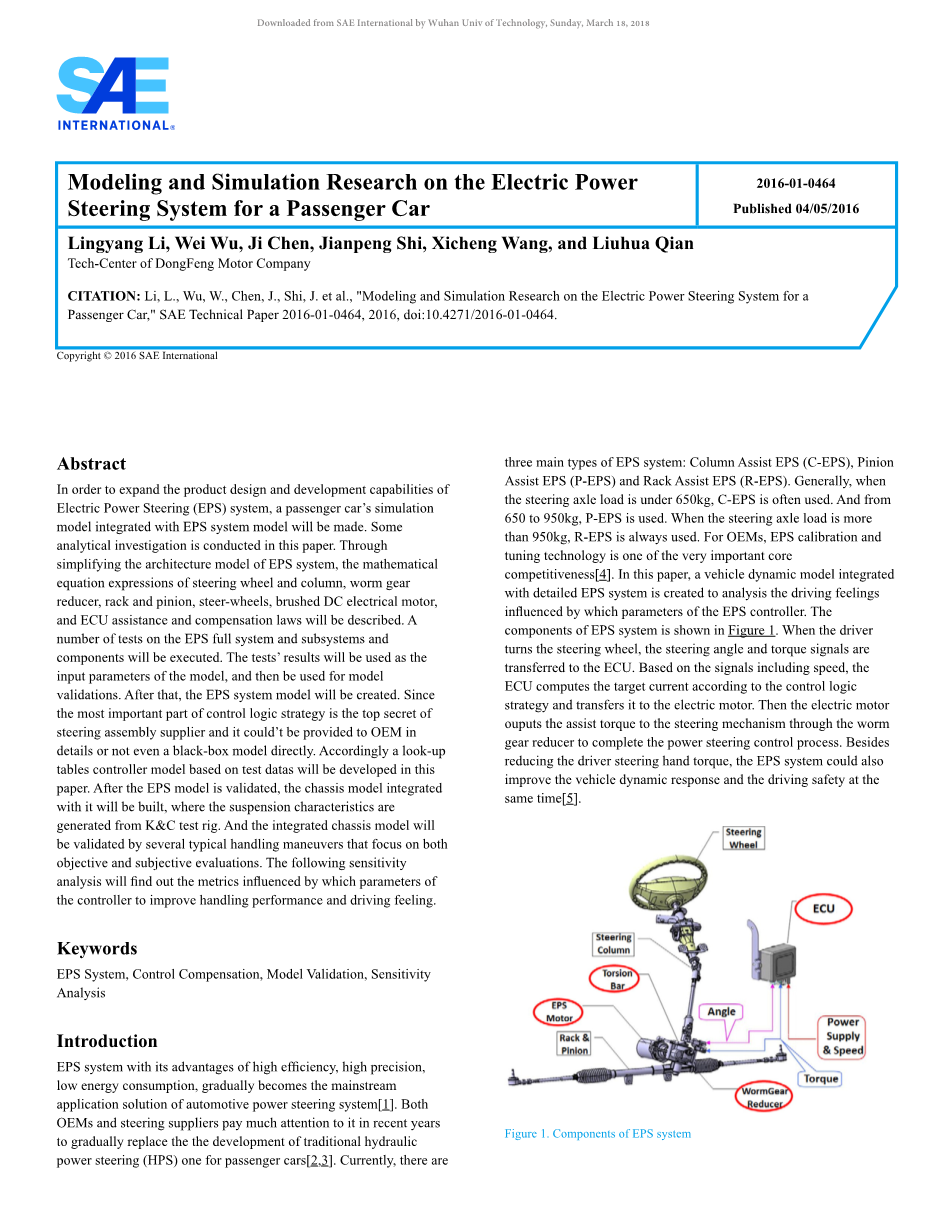
介绍:EPS系统以其效率高、精度高、能耗低等优点逐渐成为汽车动力转向系统的主流应用解决方案。近几年来,原始设备制造商和转向供应商都非常重视它,以逐步取代传统的液压动力转向系统(HPS)的发展。目前,有EPS系统的三种主要类型:柱协助EPS(C-EPS),齿轮和齿条辅助EPS(p-eps)协助EPS(r-eps)。一般来说,当转向轴载荷下650kg、C-EPS经常使用。从650到950kg,p-eps使用。当转向轴载荷超过950kg,r-eps总是用。对于OEM来说,EPS校准和调整技术是非常重要的核心竞争力之一。本文建立了与EPS系统相结合的整车动力学模型,分析了EPS控制器参数对驾驶感受的影响。EPS系统的组成部分如图1所示。当驾驶员转动方向盘时,转向角和扭矩信号被传递给ECU。根据包括速度在内的信号,ECU根据控制逻辑策略计算目标电流,并将其传递给电动机。然后,电机输出扭矩的辅助转向机构通过蜗轮蜗杆减速器完成动力转向控制过程。除了降低驾驶员转向手扭矩外,EPS系统还可以提高车辆的动力响应和行车安全性。
EPS系统模型
数学表达式
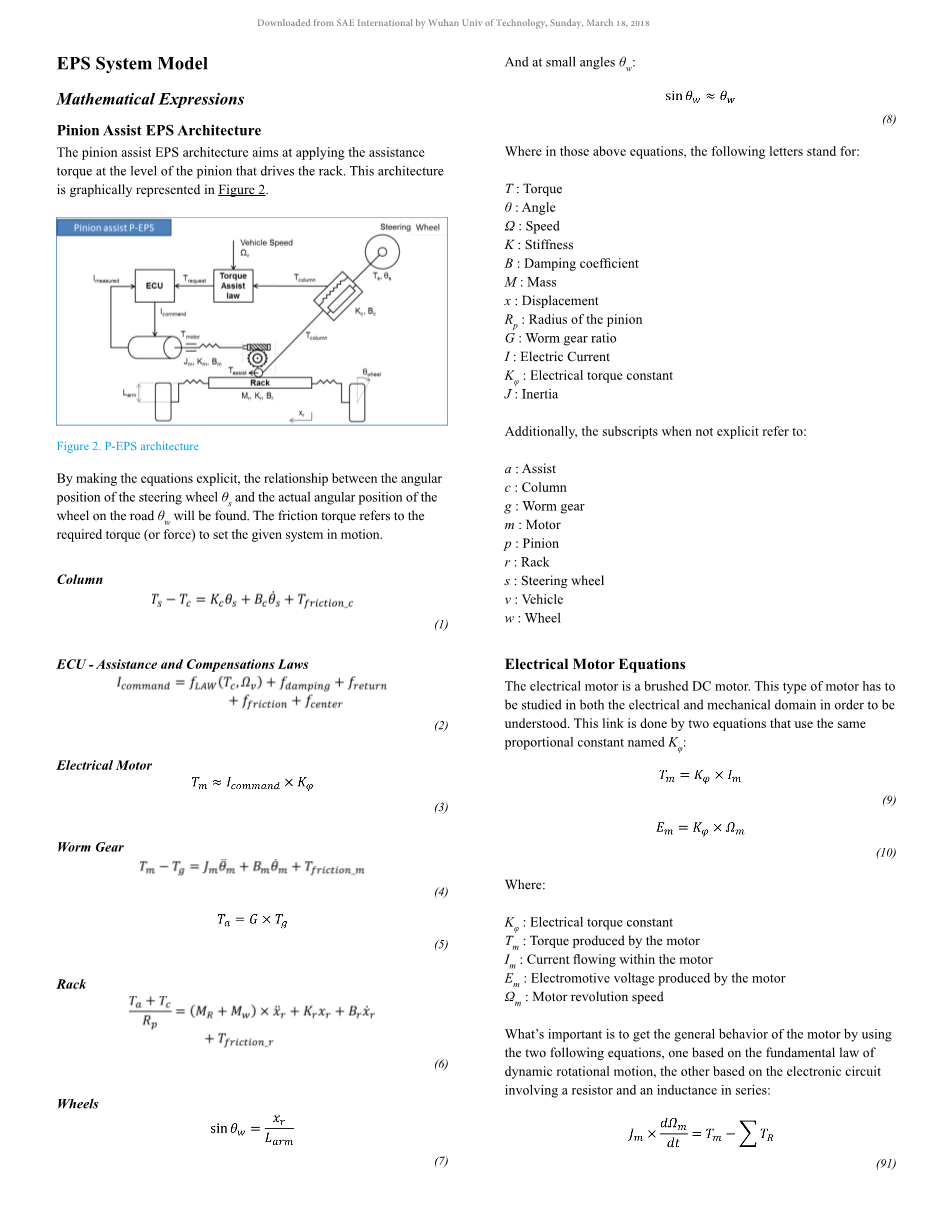
小齿轮辅助EPS结构
小齿轮助力EPS结构的目的是应用辅助扭矩在齿轮驱动齿条的水平。这种体系结构用图形表示。
通过方程的显式,方向盘的theta;和道路上的theta;W车轮实际转角位置会被发现的角位置的关系。摩擦力矩是指给定的系统运动时所需的力矩(或力)。
柱
ECU的援助和补偿法
电动机
涡轮
支架
车轮
在小角度theta;W
在上述等式中,以下字母代表:
T:转矩
theta;:角度
Omega;:速度
K:僵硬
B:阻尼系数
G:涡轮传动比
M:质量
x:位移
Rp:小齿轮的半径
I:电流
Kphi;:电气转矩常数
此外,下标不明确时指:
a:辅助装置
c:列
g:蜗轮
m:电机
p:小齿轮
r:齿条
s:方向盘
v:车辆
w:车轮
电动机方程式
电机是有刷直流电机。 这种类型的电机必须在电气和机械领域进行研究才能被理解。 该链接由两个使用相同比例常数Kphi;的等式完成:
场所:
Kphi;:电机转矩常数
Tm:马达产生的转矩
im:电流在马达内部流动
Em:电动机产生的电动电压
Omega;M:电机转速
重要的是使用两个以下方程:一个是基于动态旋转运动的基本定律,另一个是基于电阻的电子电路和串联电感。
场所:
Jm:马达的惯性
TR:所有电阻力矩之和
u:电动机在其相之间的电压。
Rm:马达电阻
Lm:电机电感
忽略电动机电流调节的控制逻辑,可以用一个简单的pi控制器实现,关键是建立电压输入与电机输出转矩的关系。为了做到这一点,为了简单起见,我们假定方程中没有电阻力矩。
参数采集
测试阶段将针对提取参数,将美联储的模型将被用于验证。产品设计及其转向系统供应商执行的EPS全系统的大量测试和对EPS系统。这套测试阶段已在装配系统、蜗轮、齿条、电动机、立柱和扭力杆上进行。测量的两个目标是:估计(子)系统参数,并获得用于关联模型的验证数据(查找表、曲线、值)。定义了执行测试的详细列表,下面的表1是摘要。
Table 1
全组装系统
不包括柱部分的EPS系统安装在“MTS 337动力转向试验台”中。当机架是自由的,不同的车辆速度的静态摩擦是从几个测试中获得的,如图3所示。
图3
当机架固定时,可以识别齿轮的侧隙和刚度。建立了通过数据拟合的数学模型,用齿隙和刚度描述了扭矩与角度曲线。该模型几乎是对称的,这意味着刚度是相等的正面和负面的角位移。在没有电机的情况下,系统的阻尼很小,车速只对电机有影响,如图4所示。这些测试用于产生用于验证目的的刚度曲线,并观察控制器输出。后者产生一个数据集,该数据集将用于验证基于查找表创建的控制律。这些测试的另一个目的是为已知输入和边界条件提取EPS控制器输出。所得到的数据将用于验证:一个类似的测试将使用EPS模型进行,之后可以进行类似的处理。结果应该是相似的。
图4
当齿条与已知的刚度连接时,与夹持架的测试相比,齿条实际上能够在外壳内移动,如图5所示。因此,可以通过给定的角位移曲线来驱动输入。从这个数据集可以推断出系统的阻抗。然而,由于这是整个系统中不同子系统的结果,因此所得到的数据主要用于模型的相关性和更新。本文已知齿条连接的刚度为86 N/mm。试验中的刚度是用液压作动器完成的。
图5
子系统:机架
在相同的MTS 337试验台上,机架的静态和动态摩擦也被测量,如图6所示。测试时的静摩擦,直接输入参数在房架的最大静摩擦力。这是通过在机架上施加一个缓慢增加的力来测试的,机架在机架上自由悬挂。这也有两个方向,其结果是非常一致的,在测试动摩擦时,输入是位移,应记录齿条移动力。
图6
子系统:蜗轮
可以识别三个阶段:静态和动态摩擦以及间隙。 它们都是在相同的MTS 337测试台上测量的,如图所示图7。 与机架一样,根据测试数据估算齿轮开始移动之前的最大静摩擦负载。 在重复测试中存在相当大的偏差,但该结果对于最大静摩擦转矩的估计仍然非常有用。 还测量了库仑摩擦力和粘滞摩擦。 由于在最低速度下的测量实际上表现出较高的摩擦,所以该测试在最终参数值估计中被忽略。 另一个重要参数是蜗轮组件的间隙。 这个参数是专门针对这个客观设计的测试设备测得的。 虽然没有提供测试的实际时间历史记录,但可以从该设备的屏幕截图中读取反冲估计。
图7
子系统:电动机
需要提取的参数是电阻,电感和转矩常数。 此外,其他参数是必需的,但可以通过不同的方式进行估算,无论是从测试,从经验还是从调整到仿真。 这些包括转子转动惯量,静态和动态摩擦。 前两个值由数字电桥操作员直接测量,并且这些值在预期的范围内,因此将保持原样。 在整个系统中进行整合时,预计这种运行温度是相同的。 转矩常数绝对是电机最重要的参数,因为它是使电机和机械性能之间关联的关键因素。 已经设计了两个测试来进行这种提取,如图8所示.
图8
用自由转子进行的一项测试是测量输入电压减去电阻电压降与稳态时的转子速度之间的关系。 另一个夹持转子的测试是测量电流和阻性转矩之间的关系。 这两个常数应该是相同的,或者至少非常接近。 扭矩常数提取在正方向和负方向都进行。 从两个不同的测试中发现的值彼此接近并且绝对具有相同的数量级,Nm / A的单位等于V /(rad / s)。 虽然重要性不如转矩常数,但仍然需要对惯性和摩擦模型做出较好的估计,以使测试结果与仿真之间具有良好的相关性。 惯性必须根据以前项目的DFMC知识进行估算,稍后将对其进行检查以提供一致的结果。 摩擦模型将基于从以前的自由转子测试估计的阻力扭矩。
子系统:列和扭转杆
最后要考虑的子系统是柱和扭杆的组装。这里要提取的主要信息是扭杆的刚度值,也称为柱,以及柱的阻尼和摩擦力。 所有这些测量都在另一个测试台上进行,如图9所示.
所有参数的总列表显示在表2
表2 EPS系统参数值图表
EPS的建模
建模任务的EPS在“SIEMENS LMS Imagine.Lab AMESim”软件下,它由几部分组成。本文主要关注验证建模的小齿轮助力的电动助力转向系统,进一步为p-eps或简单的EPS。EPS系统与EPS机电系统和EPS控制器相结合。EPS机电系统是一个详细的转向系统模型,使用从试验中提取的参数和表2。EPS控制器的功能相当于物理ECU控制器。由于EPS供应商无法提供其控制逻辑模型,所以需要在仿真中逆向工程控制器功能。
P-EPS是一种用于车辆辅助动力转向的结构,其中由电动马达产生的辅助扭矩施加在将转向柱连接到齿条的小齿轮上。 以前已经描述过P-EPS模型的数学方法,并且已经在包括柱,扭力杆,直流有刷电动机,电子控制单元,蜗轮,小齿轮和齿条等元件的功能层面对模型进行了建模。 P-EPS建模草图的实际状态可以在图中看到图10.
图10
辅助转矩的控制逻辑是电动助力转向系统的一个非常重要的部分。 ECU控制器是基于驾驶员所施加的转矩来计算辅助电流的位置,但也基于诸如车辆速度或电动机速度等若干其他参数。 这部分负责计算提供给驾驶员的辅助扭矩的数量,以提高驾驶员的舒适度。 第一部分由EPS供应商提供的基本扭矩辅助图组成,可以在图中看到图11.
图11
如果真正的EPS系统的行为需要在模型中再现,那么控制器背后的逻辑知识是至关重要的。其中只有收到一个非常简短的文件包括一个控制原理简图和几个控制补偿的特点,从转向系统1级供应商解释背后的EPS控制器本文的基本逻辑。控制逻辑策略中最重要的部分是转向装配供应商的最高机密,即严格保密。所以,供应商可以提供不所有的逻辑策略的细节也不是一个控制器直接设计黑盒模型。在本文中,设计开发了一个查找表控制器模型,根据供应商的指示和参数化基于台架试验数据。总共有15个查找表,如表3所示。和EPS控制器的模型如图12所示,这是封装成ECU控制逻辑功能模型图10P-EPS模型。
图12
表3
EPS模型验证
对于P-EPS系统模型的验证,有三种不同类型的测试条件可以使模型的行为与本文上面所述的测试过程相同。 所研究的不同边界条件是机架自由,机架夹紧,机架已知的刚度为86 N / mm。 并且假定已知刚度的测试条件更可靠,因为它还包括关于在边界处施加的齿条位置和力的信息。 与测试数据相比,与电动机相关的部分摩擦似乎仍然包含在内,这在之前未经过测试。 所以这些摩擦值来自模拟验证,在文中提到表2。 从现在开始提供的所有结果都是在对模型进行微调之后完成的,以尽可能接近测试数据。
从86 N / mm的已知刚度开始,输入信号是方向盘的角度轮廓。 在测试数据和模拟输出之间图13(a)amp;(b),相关性非常好。 机架力的绝对误差始终低于10 N,机架位移低于1.5 mm。 为了进行验证,将比较系统在输入端测试和模拟所需的转矩和电流。 目前,已经决定的是首先考虑作为基本转矩图的控制器的主要部分,然后是控制补偿,并且检查模拟结果与测试数据的接近程度。 从比较图13(c)amp;(d),相关性再次优异。图表显
全文共10522字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12727],资料为PDF文档或Word文档,PDF文档可免费转换为Word

