英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
三维桥式起重机的建模与控制
Ho-Hoon Lee
Department of Mechanical Engineering, University of Suwon
本文基于一种新定义的二自由度摆动角,建立了一种新的三维桥式起重机动力学模型。动力学模型描述了起重机的同步行驶、横移和起升运动以及由此产生的负载摆动。针对防摆控制,本文提出了一种基于稳定平衡线性化动力模型的解耦控制方案。通过实验证明,该解耦方案不仅保证负载摆动的快速衰减,也保证了起重机定位和实际同步行驶情况下负载起升的精确控制,横移及缓慢起升运动。
1 引言
桥式起重机广泛应用于工业重载运输。然而,起重机运动时产生的加速度总是引起不希望出现的负载摆动。更大的加速度通常会引起更大的负载摆动,负载的起升也会加重其摆动。这种不可避免的负载摆动通常导致效率下降、负载损坏甚至事故的发生。为了安全,桥式起重机通常都是在它们的负载比任何可能的障碍物都要高的前提下开始运动的,并且当起重机处于运动状态时,吊绳的长度一般保持恒定或缓慢变化。目前已经有各种各样的尝试来控制负载摆动。由于起重机系统控制输入参数的数量小于系统输出参数的数量,相关控制问题变得复杂化。起重机控制包括起重机运动控制、负载起升控制和负载摆动抑制。
Mita和Kanai解决了一个起重机在起动和停止时零负载摆动约束下无摆动速度特性的时间最优控制问题[1]。Ohnishi 等人提出了一个基于负载摆动动力学的防摆控制策略[2]。Starr提出了一个需要无初始负载摆动开环控制策略[3]。Ridout用根轨迹法设计了一个反馈控制律[4]。Yu等人基于一级摆模型提出了一个仅在负载质量远大于起重机质量情况下的非线性控制策略[5]。Moustafa和Abou-El-Yazid讨论了桥式起重机控制系统起升负载运动的稳定性[6]。Lee等人提出了一个保证负载快速消摆和起重机精确定位控制的防摆控制律[7]。
上述所有研究人员都关注只允许平动和起升的二维桥式起重机的控制。但是,在大多数工厂和仓库,三维桥式起重机才是更常见的。Moustafa和Ebeid导出了基于球坐标的三维桥式起重机动力学模型[8][9][10],并且之后设计了一种基于沿期望轨迹动力模型线性化的动态轨迹控制方法。他们的线性化模型是耦合的,且其参数依赖于起重机轨迹,这使得相关的控制设计和应用复杂化。他们的控制只解决了负载摆动的抑制问题,因此,他们的控制会在起重机运动和负载起升中产生相当大的定位误差。
本文提出了一种实用的三维桥式起重机建模与控制方法,将负载摆动、吊车运动和负载起升一同考虑在建模与控制中。首先,本文定义了一个新的两自由度摆角,它与三维桥式起重机的平动和横移轴线有关。其次,基于新的摆角定义,建立了起重机的非线性动力学模型。新的动力学模型相当于具有第一柔性模式三连杆柔性机器人的动力学模型。然后,在垂直稳定平衡点上对新的动力学模型进行线性化。紧接着,对起重机的平动和横移建立了解耦的动力学模型,模型参数与吊车轨迹无关,从而明显地简化了控制问题。在此基础上,本文提出了一种新的解耦防摆控制方案,以保证在平移、横移和缓慢起升运动的实际情况下,对起重机位置和负载起升的精确控制以及负载摆动的快速衰减。
本文的其余部分组织如下。在第2节中,基于一种新的两自由度摆角,本文建立了三维桥式起重机的非线性动力学模型。在第3节中,对非线性动力学模型进行线性化,然后利用回路整形、根轨迹和增益调度方法设计了一种新的解耦防摆控制方案。在第4节中,将解耦控制方案应用于三维桥式起重机系统,并进行相应的性能评价。在第5节中,总结了本研究的研究内容和结果。
2 三维桥式起重机的建模
2.1 广义坐标的定义
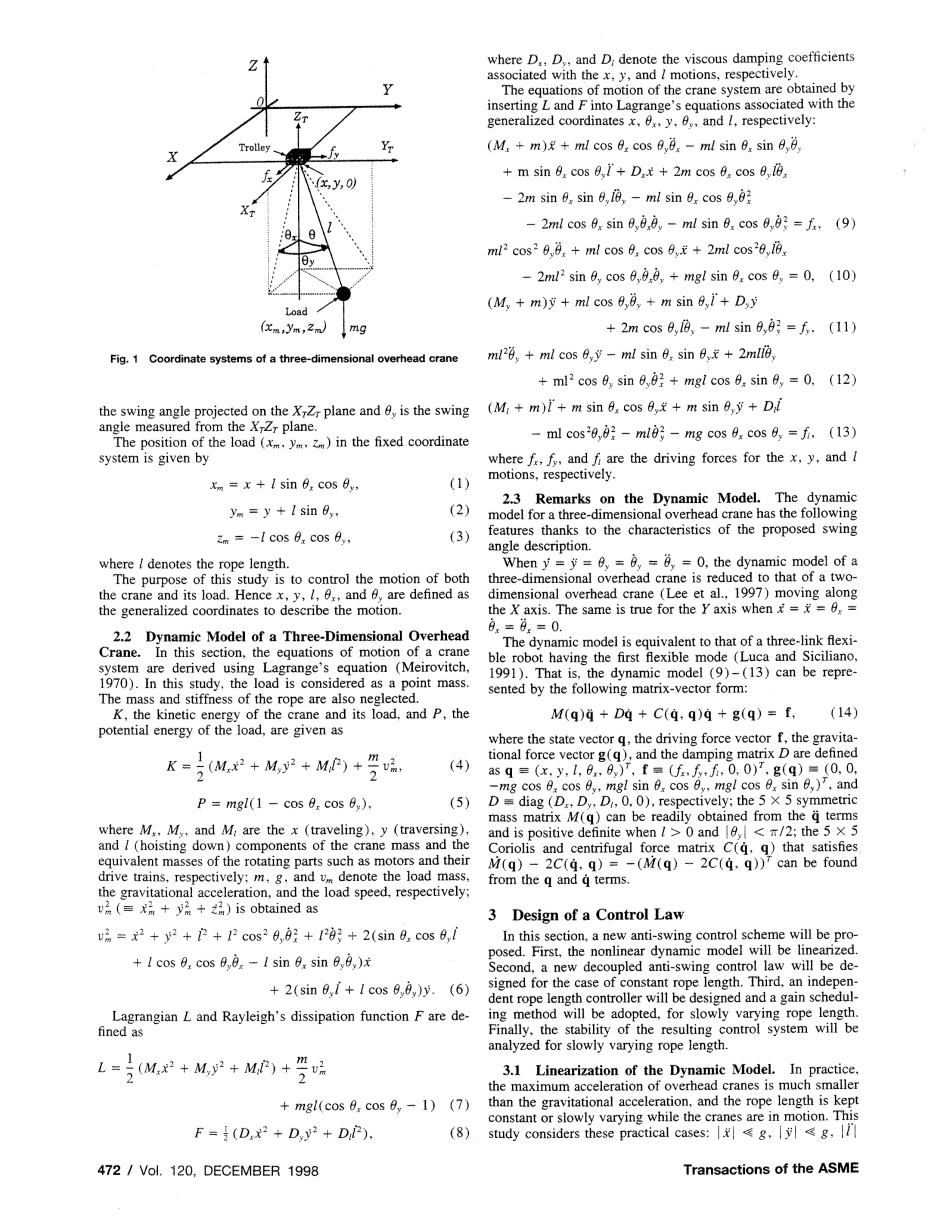
图1展示了三维桥式起重机及其负载的坐标系统。是固定的坐标系,是跟随小车移动的坐标系。在固定坐标系中,小车坐标系的初始坐标是。小车坐标系的每个轴都与固定坐标系的对应轴平行。是沿着大车方向所定义的,在图中未标出。小车沿着大车在方向横移,轴和大车沿着方向平移。是负载在空间中任意一个方向上的摆角,并且有两个分量和,其中,是摆角投影在平面上的分量,是在平面上测量所得的摆角。负载在固定坐标系中的位置为:
|
(1) |
||
|
(2) |
||
|
(3) |
其中,代表绳长。
本研究的目的是控制小车和负载的运动。因此,,,,和在广义坐标系中被用来描述相应运动。
负载
小车
图1 三维桥式起重机坐标系
2.2 三维桥式起重机的动力学模型
在本节中,Lagrange方程将用来导出起重机系统的运动方程[9]。本文将负载视作一个质点,同时忽略绳子的质量和刚度。
起重机和其负载的动能与负载的势能为:
|
(4) |
||
|
(5) |
其中,,和分别是起重机质量和旋转部件(如电机及其传动系)的等效质量在(平移),(横移)和(起升)方向上的分量;,和分别记为负载质量,重力加速度和负载速度;为:
|
(6) |
Lagrange 和Rayleigh耗散函数定义为:
|
(7) |
||
|
(8) |
其中,,和分别记为,和方向运动的粘性阻尼系数。
在广义坐标,,,和中,分别插入和到起重机系统的运动方程Lagrange方程中,得:
|
|
(9) |
|
|
|
(10) |
|
|
|
(11) |
|
|
|
(12) |
|
|
|
(13) |
其中,,和分别是,和方向运动的驱动力。
2.3 动力学模型的评价
由于本文提出的摆角所描述的特点,三维桥式起重机的动力学模型具有以下特点。
当时,三维桥式起重机的动力学模型降至沿轴移动的二维桥式起重机模型[7]。同样地,当时,三维桥式起重机的动力学模型降至沿轴移动的二维桥式起重机模型。
该动力学模型等效为一个具有第一柔性模式的三轴柔性机器人[11]。因此,该动力学模型公式(9)-(13)可由下列矩阵向量形式表示:
|
(14) |
其中,状态向量,驱动力向量,重力向量,阻尼矩阵分别被定义为
,
,
,
;
对称质量矩阵可以很容易地从项得到,并且当且;满足的科里奥利力和离心力矩阵可以从和项中得到。
3 控制律的设计
在本节中,本文提出了一种新的防摆控制方案。首先,将非线性动力学模型线性化。其次,针对绳长不变的情况,设计了一种新的解耦防摆控制律。第三,设计了一种独立绳长控制器,并且采用了缓变绳长的增益调度方法。最后,对缓变绳长控制系统的稳定性进行了分析。
3.1 动力学模型的线性化
在实际情况中,桥式起重机的最大加速度比重力加速度小得多,并且在起重机运动时,绳子的长度保持恒定或缓慢变化。本研究将考虑以下实际情况:,,,,也就是说,,,因此,摆角会很小()。于是,和也是成立的。
对于小摆角,,,,。在三角函数近似的情况下,非线性模型中的高阶项可以忽略不计。因此,非线性模型(9)-(13)可简化为下列线性化模型:
|
(15) |
||
|
(16) |
||
|
(17) |
||
|
(18) |
||
|
(19) |
这种线性化动力学模型由平移动力学部分(15)和(16)、横移动力学部分(17)和(18)和负载独立起升动力学部分(19)组成。平移和横移动力学特性是解耦及对称的,这表明三维桥式起重机的控制可以转化为两个独立的具有同样负载起升动力学特性的二维桥式起重机的控制。在本研究中,将设计一个基于平移动力学特性的防摆控制律,并将其应用于平移和横移运动的控制,并基于负载提升动力学特性设计绳长控制律(19)。
3.2 定绳长防摆控制论
在本节中,提出了一种基于回路整形和根轨迹法的二维桥式起重机控制器设计方法,该方法不受通常的负载质量的限制[4][5]。
3.2.1 速度伺服系统的设计
在实际情况中,起重机的驱动力通常由转矩伺服控制器所控制的电动机产生。因为它们通常比小车和大车动力响应快一百倍,所以其动力响应可以忽略不计。因此,在实际情况下,与转矩伺服控制器的输入成正比:
|
(20) |
其中,是与起重机有关的常数。于是,动力学模型(15)和(16)可以被改写为:
|
(21) |
||
|
(22) |
首先,式(21)中起重机动力学特性耦合项是预补偿的。也就是说,被设计为:
|
(23) |
其中,是由下式决定的新的输入。于是,起重机动力学特性可以被改写为:
|
(24) |
对式(24)应用拉普拉斯变换,得下列传递函数:
|
(25) |
其中,是独立复变量;和分别是和的拉普拉斯变换。
其次,基于使用回路整形方法设计了一个速度伺服控制器。首先,根据回路整形标准[12],开环传递函数被整形为。然后,可由得到:
|
(26) |
其中,是控制增益。更大的导致更好的指令跟踪,但是为了鲁棒稳定性和传感器噪声衰减,不能过大。
速度伺服控制器的示意图如图2所示。于是速度伺服系统的传递函数由下式可得:
|
(27) |
其中,记为速度伺服系统的参考输入。
起重机电机有时候由速度伺服控制器而不是扭矩伺服控制器控制。于是可以很好地应用由Lee等人提出的设计方法[7]。
速度伺服控制器
小车动力学特性
图2 速度伺服系统示意图
3.2.2 位置伺服系统的设计
图3显示了位置伺服系统的示意图,其中是位置伺服控制器,是速度伺服系统,是速度扰动,是将起重机速度转换为起重机位置的积分器。起重机车轮的滑动就是的一个例子。
位置伺服控制器
速度伺服系统
图3 位置伺服系统示意图
如上文所说,由回路整形方法基于设计而得;开环传递函数由下式整形而成:
|
(28) |
其中,和是满足的常数;是的穿越频率。于是位置伺服控制器可由得到:
|
(29) |
于是闭环传递函数见下式:
|
(30) |
其中,和分别是对位置伺服系统的参考输入和的拉普拉斯变换形式。
3.2.3 整体控制系统的设计
全文共13711字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12641],资料为PDF文档或Word文档,PDF文档可免费转换为Word

