英语原文共 11 页
转向系统在转向试验台上的分析与应用
摘要:本文重点介绍基于测试试验台的电动力转向系统(EPS)的应用和分析。第一部分,试验台的设置和物理结构。它表明可以测量控制参数是怎样变化的,以援助放大为例。在下一章中,介绍了一种基于测试台的预应用方法。通过改变(电)控制器电流的控制参数,硬件伺服单元的变化改变了转向感觉并且需要补偿。实验设计的方法被介绍用于减少控制参数的数量组合。基于预定义的测试计划,测量是用来创建一个经验模型。该模型进一步应用于优化问题来计算最优的一组参数。此优化通过额外验证测量。
关键词:转向应用 试验台 实验设计
- 前言
转向行为对客户对车辆性能的感知有直接影响。转向车轮提供有关驾驶条件的信息,因此,转向系统直接影响驾驶员指导行为。
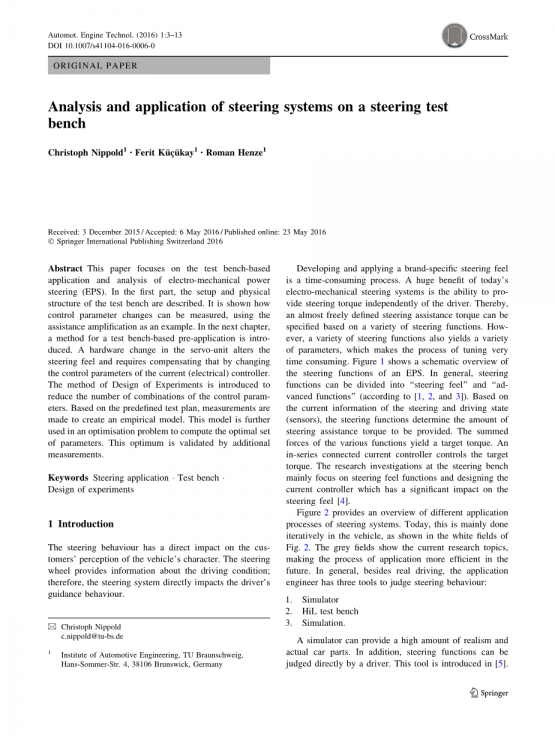
开发和应用一个特定的品牌转向感是一个耗时的过程。今天的机电控制系统的一个巨大的好处是除司机外能够独立提供转向力矩。从而,一个几乎自由定义的转向辅助扭矩可以基于各种转向功能指定。然而,各种转向功能也产生多种功能参数,这使得调整过程是非常紧张耗时的。图1显示了一个EPS的转向功能的示意图概述。一般来说,转向功能可分为“转向感觉”和“高级功能”(根据[图1,2和3])。基于转向和行驶状态的当前信息(传感器),转向功能决定了提供转向辅助扭矩的数量。求和各种功能的力产生一个目标扭矩。一个串联连接电流控制器控制目标扭矩。转向工作台的研究调查主要关注转向感觉功能和设计出对转向感有重大影响的电流控制器[4]。
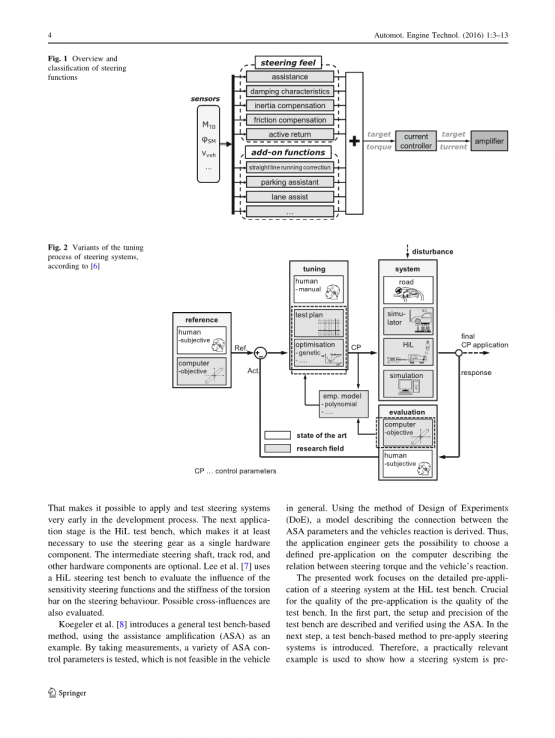
图2概述了转向系统的不同应用程序进程。今天,这主要是迭代完成的车辆,如白色的图2所示。灰色字段显示当前的研究主题,使应用程序在未来更高效。一般来说,除了真正的驾驶,应用工程师有三个工具来判断转向行为:
1.模拟器
2. HiL测试台
3.模拟。
模拟器可以提供大量的真实感和实际的汽车零件。此外,转向功能也可以由司机直接判断。 该工具在[5]中介绍。这使得在开发过程的早期阶段应用和测试转向系统成为可能。下一个应用程序阶段是仿真试验台,这使得它至少需要使用舵机作为一个单独的硬件组件。中间转向轴、转向横拉杆和其他硬件组件是可选的。李等人[7]用一个HiL转向试验台来评估转向功能灵敏度的影响和在转向行为中扭力杆的扭转刚度。 可能的交叉影响也被评估。
Koegeler等人[8]介绍了一个通用的测试试验台基础方法,使用援助放大(ASA)作为一个例子。通过采用测量工具,各种ASA控制参数被测试,这在一般的车辆中是不可行的。使用实验设计方法(DoE),模型描述ASA参数和车辆的反应之间的联系。从而,应用工程师有可能选择一个定义在计算机上的预应用程序描述转向扭矩与车辆反应之间的关系。介绍的工作重点是在HIL试验台上的转向系统的详细的预申请。对预申请质量关键的是试验台的质量。在第一部分,描述了试验台的设置和精度,并且使用ASA进行验证。下一步,介绍了预先应用于转向系统的基于测试台的方法。因此,实际上示例用于说明转向系统如何预先应用于定义的参考行为。在布伦瑞克大学的汽车工程研究所,他最后的一部分工作是对如何分析和评价转向系统提出未来展望。
- 转向试验台
执行器的精度(转向角和反作用力)以及定义状态变量的分辨率对于基于测试台的转向系统预应用的质量至关重要。 特别是,测量应用中最小变化的能力是转向试验台上应用过程的实用方法的基础。 作为一个特定的目标区域,转向系统伺服电机的力的适用步长可以命名为转向齿条处约2 N.
图3显示了转向测试台的原理图设置和信号流。 唯一安装的硬件组件是舵机和中间转向轴。 由于主要关注的是研究转向器的应用,故意将转向柱放在一边,因为这项工作的重点是分析两个动力单元的差异。
齿条力由线性马达通过修改的轨道杆提供。 该履带杆配有两个履带杆接头,以补偿齿条和直线电机轴的潜在同轴行为。 这个设置消除了限制,否则会导致转向装置内的摩擦力增加。
车轮的反作用力由线性马达提供,该马达具有非常好的精度(见图4)和高动态性。由于必须对力进行滤波,因此目标力与实际力之间存在相位偏移。该偏移在1Hz激励下约为4度,与实车行为(方向盘角度与横向加速度)相比相对较低。为了获得尽可能高的力精度,有意选择了直线电机。线性马达的最大可能力为2500 N,这足以用于研究中心转向。使用两个执行器,可以执行驱动动态线性区域的操纵(大约5 m / s2横向加速度)。因此,可以在第一种方法中涵盖各种相关的驾驶操纵。对于停车操纵,具有高横向加速度的驾驶操纵和具有高前轴负载的车辆,必须对执行器进行修改。必须要说的是,对于像大多数情况下使用的力控制这样的控制器,在精度和最大力之间存在折衷。这使得必须使控制系统适应每个调查的重点。线性马达配备有测量定子当前位置的传感器。该测量的位移充当用于实时计算所需齿条力的车辆模型的输入。
该车型是先进的单轨模型,其通过非线性轮胎行为,轮胎的松弛长度和悬架弹性而得到扩展。 基础研究不需要更深入的建模方法(侧倾行为,外倾板模型,弹簧和阻尼器设置等),因为应用程序应该与测试台测量的参考行为相匹配,并且调查的驾驶操作 最大横向加速度约为2 m / s2。 然而,可以想象使用经验证的更详细的模型对悬架系统的部件对转向感觉的影响进行更多研究。 此外,模拟的车辆速度以及其他必要的状态变量通过车辆CAN实时地发送到转向的ECU。
此外,测试台配有外部传感器。 首先,高精度距离传感器,测量范围为10 mm,精度约为10 mm/ 0.15 lm,独立安装在试验台的底座上。 其次,使用负责转向的电动机和中间转向轴之间的外部扭矩传感器(参见图3 ETS)。 该传感器作为额外的评估标准,并且具有大约相当于最大的测量范围内的精度。
通过更改辅助放大器(ASA)显示测试台对应用参数的能力。 图5显示了具有三种ASA变体的正弦转向(5,0.2 Hz,100 km / h)的结果:
1.bull;ASA 100%(基础)
2.bull;ASA 100.6%
3.bull;ASA 101.2%
这些是ASA可能的最小变化。 每次操作都有五个周期并且重复五次,并且仅评估每次重复的中心三个周期。 可以看出,具有不同ASA值的三种变化在工作点上显着不同(见图6)。 虚线表示所示平均曲线的标准偏差的1倍。 在扭杆扭矩以及齿条位移中可以观察到应用的差异。
但是,齿条位移显示了应用变量的更高统计可分性,如图7所示。基于标准偏差,变量的偏差显示为特定切割(参见图6A-A和B-B)。
在这一点上应该注意,必须为转向功能(驾驶操纵,传感器和评估区域)的评估和描述确定一个特征点,以便以最佳方式描述它们。 这将在下一章中得到证实,其中当建立转向速度或齿条位移时,电流控制器的应用显着不同。
- HiL应用程序
开发一种方法可以使转向系统应用程序适用于定义的参考行为,这是本次调查的目标。 这是使用转向系统的硬件改变的示例示出的。 因此,使用在电气部件中使用不同材料的两个动力单元(伺服电动机和ECU的组合单元)。 当使用相同的控制参数(CP)时,这会导致不同的转向感。 通过调整电流控制器的应用并比较同一舵机上的两个动力单元来消除机械影响(见图8),可以实现所需的转向特性(参考特性)。
对概述的应用的模拟解决方案将使得必须具有转向系统的电子的详细模型以及非常复杂的识别过程以确定改变的材料成分的影响。 因此,HiL解决方案是基于硬件的复杂性与影响的真实表示之间的合理折衷。
为了适应转向感,使用电流控制器的十个控制参数。 由于这些参数的可用组合的数量相当高,因此使用实验设计(DoE)的方法。 这最大限度地减少了获取描述系统行为和当前控制器影响所需信息所需的工作量。
图9显示了使用该方法将转向系统应用于参考行为的基本方案转向试验台。 基于定义的测试计划(1)和随后的测量(2),获得客观数据(3)。 之后使用合适的数学模型计算系统行为(4)。 通过结合参考功率组(0)的测量行为,可以在以下优化过程(5)中获得参数组。 为确保此参数集与参考行为匹配并补偿硬件更改,将对优化参数进行验证测试。
总而言之,测试平台受干扰的影响明显小于实际测试。 由于本调查的目的是测量应用参数的最微小变化,因此需要进行各种重复测量以生成重要的目标数据库。
首先,特征是识别限制检查区域的特征。 这是通过进行敏感性研究来完成的。 图10显示了时域中使用的双梯形转向操纵。 标记区域显示特征点,其中硬件变化导致转向行为的变化(参见图15“基线 - 参考线”)。 特别地,起动行为“以0 / s的转向速度”在动力单元之间发挥作用。
正确描述系统行为的特征值在该领域中被识别。 通过数学模型优化控制参数。
-
- 测试计划并选择数学模型
作为第一步,描述了测试计划的生成,并确定了d-最优计划的决策。 特别是在处理实验结果时,这种DoE方法是有益的,因此用于发动机和汽车变速器领域[6,9,10,11,[12]。 测试计划的生成的特征在于最小化行列式(XT 9 X)-1。 这里,X是描述控制参数的配置空间的设计矩阵。 d-最优计划的特征在于,配置空间主要在靠近边界的区域中填充。
图11-左侧显示了具有由两个测量点组成的d-最佳设置的测试计划。 该图的右侧显示了空间填充测试计划。 由方框图描述的测量不确定性产生更高的灰线梯度。 这导致阴影部分周围的较高包裹区域,从而增加估计模型及其参数的方差。 使用d-最优计划,可以以整体模型精度增加的方式估计参数。
除了创建测试计划外,还可以选择数学模型。 在这项工作的背景下,选择了基于多项式方法的数学模型。 等式1示出了具有交叉效应的多项式模型的示例:
(1)
这项工作依赖于多项式三次的基函数。 测试的数量可以从回归量的数量和模型的复杂性中得出,并且通过1.6的冗余因子延伸,导致138个控制参数变体([13]建议冗余因子至少为1.5)。
3.2 测量和转向操作
所有测量均在安装在同一舵机上的相应动力单元上进行。 这与概览的第0点和第2点相对应(参见图9)。 首先,测量参考单位。 为了确保正确描述参考行为,参考单位的重复次数是重复的三倍(12次重复)。 然后,安装具有改变的硬件配置的电源组,并且进行所有测量(完整的DoE计划)。 除了引入的梯形机动之外,还执行正弦扫描以检测由电流控制器参数引起的系统中可能的不稳定性(图12)。
3.3 DoE并选择数学模型
在测量之后,处理数据并检测特征点。 数据处理包括滤波,选择,异常值检测以及平均值曲线的计算及其标准偏差。 基于平均值曲线,识别特征。 基于基础和参考行为的测量以及主观评估来识别动力单元的特征。 因此,驾驶行为表明动力单元在其启动行为方面特别不同。
特别考虑到在物镜中观察到的两个外部传感器(扭矩和齿条位移)值测量,可以看到显着的差异。 特征值来自方向盘扭矩和齿条位移之间的关系,以量化变化的电子元件的影响(见图13)。 基础行为的方向盘扭矩梯度的最大值低反映了主观驾驶印象。 为了实现相同的方向盘角度,驾驶员必须提供更高的转向性能。 两种变体的最大值相差5%。 两条曲线之间的区域用于优化方向盘扭矩率的基本形状。
虽然(3)描述了参考表面(参考动力装置曲线下面的区域),但(4)描述了参考曲线和参数变量曲线(包络面)之间的表面。 在区域(4)变为零的情况下,两条曲线是相同的。 图13显示了从方向盘角度等于0(中心位置)开始的转向操纵曲线。 这些特征值在操作点类似地计算。
3.4 建模
在优化控制参数之前,必须计算数学模型。 这是针对每个特征值(CV)完成的(参见图13. swtp_max_cpVar和A_swtp_cpRef-Var)。 在此过程中,特征值和控制参数被置于数学关系中,如公式2所示。
(2)
图14显示了特征值A_swtp_cpRef-Var和A_swtp_opRef-Var的数学模型的质量。 作为模型质量的标准,调整后的系数确定,如公式3所示使用。 其中,n是控制参数变量的数量,p是模型系数的数量。
(3)
更精确模型的偏差可以通过测量不确定性和简化模型(多项式模型)来解释。
3.5 优化
为了理想地识别描述参考行为的控制参数,将优化过程应用于所获得的数学模型。 为了使各种控制参数适用于目标函数,将它们标准化为参考行为,如等式4所述。 在图4中,j是要进行优化的变换的特征值的数量。
(4)
在CV描述两条曲线之间的曲面的情况下,归一化由方程式5完成。 因此,参考曲线和参数变量曲线之间的区域除以参考曲线下的表面。 检查的长度由z描述。 此外,k是使用的CV_A的编号,其表征包络表面。
(5)
然后,通过遗传优化算法使以下目标函数(OF)最小化。 这种算法使用的方法与自然选择非常相似。 具有起始参数集(随机生成),它以各种方式改变参数,并且仅保留参数集,这改善了整体结果。 经过几次迭代后,找
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

