英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
混合动力电动汽车自动变速器的拓扑优化
摘要 - 目前,许多不同的拓扑被设计采用不同的传输技术,例如自动化人工传输(AMT)和无级变速传输(CVT)。拓扑的选择决定了能量流动效率,混合动力系统,发动机和车辆之间的效率车轮。最小化燃料消耗的最佳拓扑是受传输技术的影响。因此,一个AMT(高效率)和推带式CVT(中等效率)在本研究中用于比较。另外,一个受控的在可控的情况下,开关拓扑被引入作为基准之前与电机的附加离合器联接或者在传输之后最小化传输损耗并且提高混合性能。结果显示:开关拓扑可以显着改善CO2排放减少(平均相对改善2%至7%),特别是对于基于CVT的混合动力车辆。而且,如果是AMT,预耦合拓扑是优选的,并且在a的情况下对于全混合动力汽车来说,CVT是一种后连接方式。对于这些情况下,选择最佳的固定拓扑可以改善相对性二氧化碳排放量减少2%至8%。
关键词 - 动态规划(DP),能源管理,燃料优化控制,建模,优化,道路车辆推进,拓扑结构,传输。
一、导言
为车辆设计混合动力传动系统是一个复杂的任务。 这个多域设计问题包括寻找最佳组件尺寸,组件技术,拓扑结构和控制设计[1]。 此外,这个非凸非线性设计问题的所有领域(例如参见[2])都是相互关联的,并且通常需要多目标设计解决方案,例如,最小化生产成本,同时最大化度量环境和动态表现,如二氧化碳排放减少,车辆加速度,舒适性和驾驶性能。许多不同的和新的混合动力(电动和机械)传动系统的拓扑结构被开发出来并被引入市场[3]。 拓扑主要由位置定义传动系统中的电机,它可能在哪里预先或后连接到变速箱。另外,使用不同类型的传输技术。例如,奔驰S400混合动力车使用七速自动变速箱(7-AT)与预耦合电动机(160-N·m / 15-kW)和两个离合器[4]以及本田思域IMA使用推带式无级变速器(CVT)也可与预耦合电机组合使用(103-N·m / 15-kW),但带有单个离合器。相比之下,丰田普锐斯使用由两部分组成的电气CVT(e-CVT)带行星齿轮组的电机(30kW / 50kW)[5]。轮侧的电机(50kW)用于在发动机关闭时进行电驱动和制动[6]。自从总节油潜力的最大部分是通过使用获得的这些模式(与发动机在车辆停止时一起启动/停止)一样,这种拓扑结构可以被看作是固定的拓扑结构,其中电机主要是后连接到变速箱。最近,一辆新的演示车被实现了电机(15千瓦)在传输后固定连接并结合推动式CVT实现节省燃油在新的欧洲驾驶循环中为8%至10%(NEDC),与预耦合拓扑[7]在本文中,我们调查和比较潜力三种不同的全并联混合动力传动系统拓扑结构:第一种拓扑结构具有预耦合电机,即,电机的位置固定在发动机和发动机之间传输; 第二种拓扑结构具有后联电机,即电机固定在电机之间传输和差分。 第三种拓扑允许能源管理系统来选择电力的位置机器在预先和后期之间,使用适当的离合器系统。 另外,要有一个公平的比较在具有最大潜力的不同拓扑之间,我们研究拓扑选择对网络的影响电机和发动机的最佳尺寸。 此外,考虑两种不同的传输技术,即六速自动手动变速箱(AMT)和推带式(CVT)每个拓扑结构的潜力可以用二氧化碳量化(以克每公里计)排放量。 动态编程(DP)与预定的驱动循环一起使用计算每辆车的最低二氧化碳排放量成形。 这样,能源管理的影响战略从调查中删除。本文组织如下。 在第二节中,三种不同的拓扑结构在概念上被提出。 在第三节中,拓扑结构是数学建模,其中的运动学约束也被解释。 模型缩放方法第四部分解释了主要组成部分,在第五节中,最优控制问题是形式化的,在第六节中讨论了实施和设计优化方法。 在第七部分中,结果进行了介绍和讨论。最后,在第八节中,我们陈述了我们的结论。
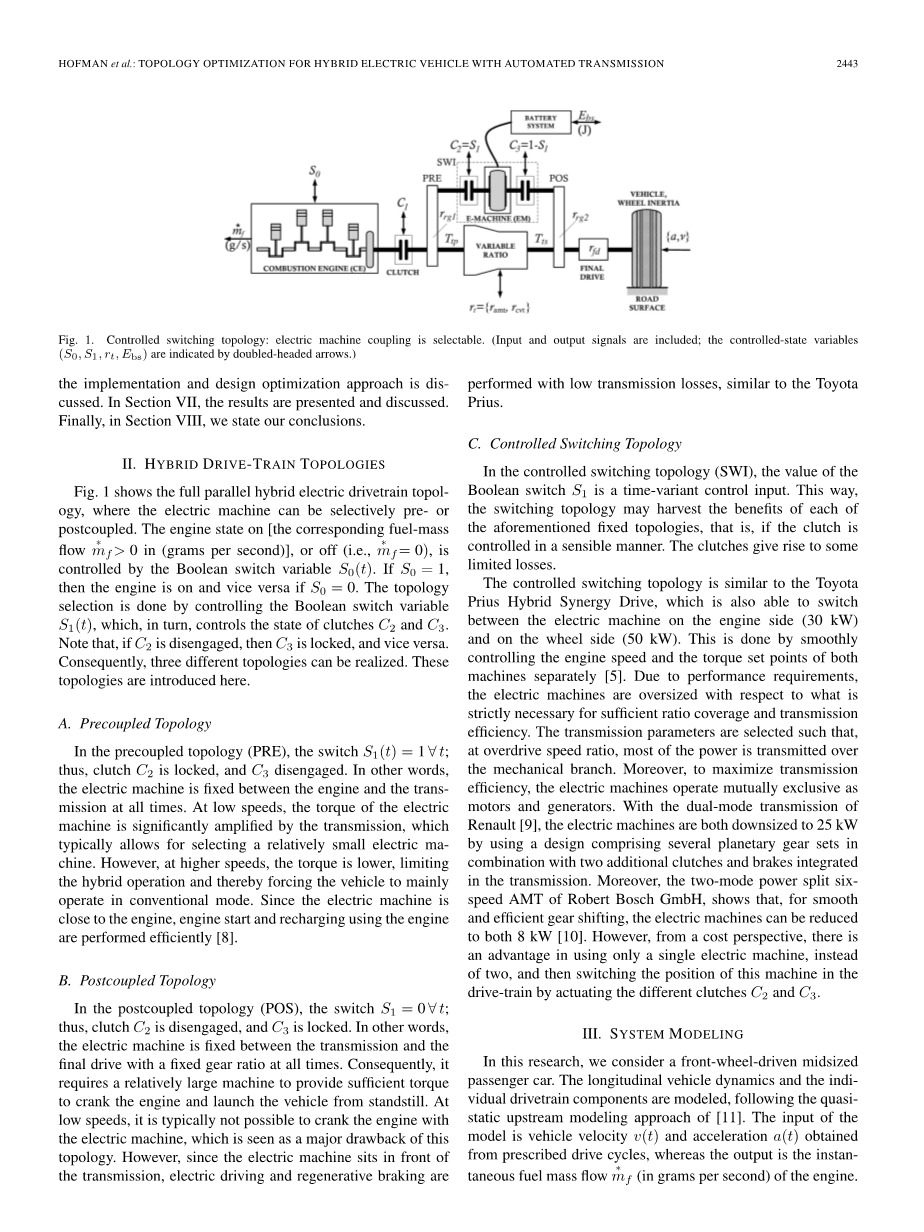
- 预耦合拓扑在预耦合拓扑(PRE)中,开关S1(t)= 1forall;t;因此离合器C2被锁定,并且C3脱离。 换一种说法,电机始终固定在发动机和变速箱之间。 在低速时,电动机的扭矩机器被传输显着放大,这通常允许选择相对较小的电机。 但是,在更高速度下,转矩较低,限制混合操作并由此强制车辆主要以常规模式运行。 由于电机是靠近发动机,使用发动机进行发动机启动和充电有效地执行[8]
- 后缀拓扑在后缀拓扑结构(POS)中,开关S1 = 0forall;t;离合器C2分离,C3被锁定。 换一种说法,电机固定在变速箱和变速箱之间始终以固定传动比进行最终传动。 因此,它需要相对较大的机器来提供足够的扭矩起动发动机并从静止状态启动车辆。 在低速时,通常不可能用发动机起动发动机电机,这被看作是其主要缺点拓扑结构。 但是,由于电机坐在前面传动,电动和再生制动以低传输损失执行,类似于丰田普锐斯
- 受控开关拓扑在受控开关拓扑结构(SWI)中,布尔开关S1是一个时变控制输入。 这条路,交换拓扑结构可能会收获每个的好处前述的固定拓扑结构,也就是说,如果离合器是以合理的方式控制。 离合器引起了一些损失有限。受控开关拓扑与丰田类似Prius Hybrid Synergy Drive,它也可以切换发动机侧的电机(30 kW)和车轮侧(50千瓦)。这是顺利完成的控制两者的发动机速度和扭矩设定点机器分开[5]。由于性能要求,电机的尺寸超过了什么尺寸对于充分的比例覆盖和传输来说是严格必要效率。传输参数被选择为使得,在高速传动比下,大部分功率都被传输过来机械分支。此外,要最大限度地传输效率,电机运行互斥电机和发电机。随着双模传输雷诺[9],电机都缩小到25千瓦通过使用包含多个行星齿轮组的设计与两个附加的离合器和制动器相结合在传输中。此外,罗伯特博世有限公司的双模式动力分配六速AMT显示,为平稳高效换档,电机可以减少至8千瓦[10]。但是,从成本的角度来看,取而代之的是仅使用单个电机的优点两个,然后切换在这台机器的位置通过启动不同的离合器C2和C3来实现传动系统。III。 系统建模在这项研究中,我们考虑一个前轮驱动的中型乘用车。 仿照[11]的准静态上游建模方法对纵向车辆动力学和各个传动系部件进行建模。 的输入模型是获得的车辆速度v(t)和加速度a(t)来自规定的驱动循环,而输出是立即燃料质量流量*mf(克每秒)的发动机。
该系统具有两种状态,即电池的能量状态和当前档位号码。 另外,该系统有三个控制变量。 第一个控制权本质上是权力分割在电机和内燃机之间。该第二个控制是变速器的传动比,而第三个控件是布尔开关变量。 输出,状态,并在随后详细描述控制变量部分。
- 整车
推动车辆所需的动力是近似的由气动阻力,滚动阻力,和惯性力。
给出了参数化该方程所需的值在表I中。总的车辆质量是名义上的总和车辆质量,内燃机,电池系统和电力机器,即,
我们假设最大为总制动的60%动力可以在前轮恢复。 剩余的制动功率消耗在后轮摩擦制动器中。因此,前轮的功率是
B.传输
变速器的输出功率由下式给出
其中eta;fd和eta;rg2是最终驱动装置的效率值和第二减速齿轮组(参见图1)当电机后连接到变速器时,即C3 = 1。传输损耗以及因此传输功率Ptp强烈依赖于传输技术。在本文中,我们考虑两种不同的变速器技术:AMT和推带式CVT ,AMT通常具有相对高的传输效率,92%-98%的效率,但只有有限的一组离散齿轮比并在换挡期间扭矩中断。 最近,权力转移解决方案由日立[12],[13]和马涅蒂开发Marelli Powertrain [14],[15]消除这个缺点。 在相比之下,标准的液压驱动的无级变速器CVT有一个效率较低,为75%-77%。 而且,效率是非线性并取决于车辆的速度,传输速度比和输入扭矩。 另一方面,CVT是不限于一组离散的齿轮比,因此具有让预耦合传动系统组件更有潜力高效,平稳的运行。
以下传输模型是经验效率模型使用扭矩损失来描述内部的集中损失装置。 对于这两款车型来说,最终车型的损失都是包括在集中扭矩损失中
- CVT:用于仿真的准静态效率模型基于博世CVT P920型的测量数据[16]。 扭矩损失Tt0由液压泵的总和组成扭矩损失和机械皮带摩擦,滑移和最终传动设定转矩损失,
集中泵和机械扭矩损失,这是一个液压管路压力ps功能,变速器输入转速omega;tp,转矩Ttp和传动比rcvt基于查找表。所需的变速器输入扭矩为
请注意,转矩输入是计算转矩损耗所必需的。扭矩损失最初是通过假设Ttp =来估计的Tts·rcvt
2)AMT:使用[17]的准静态效率模型对于基于a的测量数据的AMT生产线齿轮传动。 变速器输入扭矩为通过计算
拖动扭矩损失Tt0,其中包括最终传动设定扭矩损耗,取决于输入速度omega;tp,并与其成比例标称变速器输入转速和转矩。 这些被认为等于最大发动机转速和扭矩。内部效率eamt取决于离散传动比ramt。
C.电池
电池输出功率由下式给出
其中Pbs是电池的内部功率。 第二届在这个等式的右边近似于损失在电池中,其中R是内阻,而Voc是开路电压。 请注意Pbs lt;0使电池放电。电池电量受下限和上限的限制
- 电机
电机的机械输出功率是由下式提供
参数eta; em和eta;-em表示发电机和电机有效 - ciency值,分别从静态地图中获得由转速omega;em和转矩Tem确定。 输出功率是受速度限制
电机通过变速器连接到变速器具有恒定效率eta;rg1或eta;rg2的减速齿轮组,取决于机器是预先还是后期连接。
- 内燃机
发动机的机械输出功率由下式给出
其中Ptp是传输输入功率。 第二届右侧是机器的输出功率电机评估输出的第一次减少齿轮组。 请注意,如果电机的输出功率等于变速器输入,即发动机功率为零,发动机关闭(S0 = 0),离合器C1为分离,或等于0并且不引起拖曳转矩。发动机模型基于线性Willans近似,即,
其中pme和pmf分别是平均有效压力和平均有效燃料压力。 所示的效率平均有效压力损失pme0是已知函数的平均活塞速度厘米,并假定是独立的发动机尺寸。 平均有效压力是从中获得的机械输出功率使用
其中Vd是发动机排量,omega;ce是发动机角速度。 最后,可以计算燃料质量流量运用
其中hlhv(以每公斤焦耳为单位)是较低的热值的汽油。
IV. 模型标尺
假设发动机的冲程持续不变,发动机就会缩放比。 另外,假定最大平均有效压力和平均活塞速度独立于发动机位移量Vd。 这样,扭矩和旋转使用缩放引擎的速度。
其中S是活塞行程。 惯性和体重发动机根据[17]缩放,即
电机的效率图,扭矩约束,惯性和质量与最大值成线性关系设备的功率。设备的更新,电池的最大充电和放电功率通过增加或减少串联连接的电池模块的数量来缩放。 每个模块包含一个固定的电池数量达到一定的电压。表II显示了用于缩放的参考数据发动机,电机和电池。
表示的第一减速齿轮组的齿轮比作为rrg1,选择这样的电动机的最大速度机器与发动机的最大速度一致。该选择第二减速齿轮组rrg2的齿轮比电机没有以120公里/小时超速。 这些假设确保电机不会超过它在任何情况下,在规定的驱动循环中的最大速度。 对于比较原因,最终传动比,表示为rfd,适用于CVT的过驱动值两种传输都是相同的。 这样,比例的差异覆盖率对二氧化碳排放量的影响相对较小。
V.最优控制问题
最优控制问题包括找到控制输入u(t)forall;tisin;[0,tf],受限于一些约束条件,使燃料消耗总量(或产生的二氧化碳)最小化在给定的驾驶周期内,即,
受限于以下公式,
第一个控制输入是电池电量。
如果选择u1(t)以使总功率需求被覆盖只靠电机,然后发动机关闭,离合器C1脱开。
系统的第一个动态状态是能量状态电池,即,
初始条件x1,0被选为中点间隔先前指定。第二控制输入和第二状态是期望的未来的档位号码和当前档位号码,即,
其中,
出于数字原因,选择了有限的值N = 10CVT,假设这些值足以近似连续的传动比范围可用。 这个的影响CO2排放量变化的值从5变化到40发现很小(小于0.5%)。 仅在AMT的情况下允许转换到相邻的档位号码。 此外,我们假设换档所需的时间是即时的。为了简单起见,速度比没有受到限制变化为CVT,表示为r˙cvt。 最大值发现绝对速度比率变化低于1(1 / s)检查了CVT病例。
第三个控制输入是布尔开关变量S1(t)控制离合器C2(t)和C3(t),即,
其中,
最后,扰动矢量是,
指定v(t)(速度)和a(t)(速度)的驾驶循环改变)。 DP [22],结合规定的驱动器周期,用于计算二氧化碳的最低排放量每种车辆配置。 这样,影响了能源管理策略已从调查中删除。在下一节中,将给出DP决策算法的简要概述。 另外还有一些控制模拟作为示例,对于特定尺寸的混合动力传动系的结果被讨论。
VI. 实施和优化方法
如第五部分所讨论的控制优化问题,用确定性DP解决[22]。 由于DP是一个数字算法用于解决连续和离散控制问题,连续时间模型(21)也必须显式化。 让描述系统的总离散时间模型动力学由...给出
状态变量x(k)isin;X,控制信号u(k)isin;U.此外,干扰(35)被认为是完美的提前知道并且在每个时刻k。 准则以离散时间格式最小化并以a表示非递归形式变成,
随时间流逝,这是表示为Delta;t和定义作为常数差:t(k
全文共8938字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11888],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

