英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
用于电池驱动车辆中的燃料电池增程器的多模式功率处理接口
强调 1.使用双载波调制器对非反相多模式降压 - 升压转换器信号析。
2.派生简单的双回路控制器以确保良好的跟踪和抗干扰能力。
3.该系统被用作电动动力总成中的燃料电池功率处理接口。
4.显示模拟和实验来验证所呈现的结果。
文章信息:
文章历史:
2017年3月28日收到
2017年6月21日修改后收到
2017年7月15日接受
2017年7月25日在线提供
摘要:电动汽车通常使用电池作为专用电源。为了弥补有限的能量密度以及由此引起的车辆的运行时间不足,经常使用基于燃料的增程器。增程器的操作策略是最大化任务持续时间,因此它应该在最小特定燃料消耗点运行。此外,来源和负载电压电平可能不同,因此同相的降压 - 升压转换器(NBC)将它们联合在一起保持期望操作点。本文提出了一种基于燃料电池(FC)的增程器,通过级联输出功率调节策略与主电源母线连接NBC。 NBC基于独特的调制器,可为两个转换器支路产生开关序列。调制器接收来自双环路调节器,内部电感电流环路和外部输出功率环路的单一控制输入,这对混合能源的能量管理策略而言是常见的。尽管工厂运行范围各异,设计仍然从基于NBC的小信号分析的调节器设计开始,然后显示建议的控制架构允许在整个整个系统中进行严格的输出功率控制 。最后提出了一个案例研究,其中转换器作为燃料电池的功率处理接口工作,在无人机中用作增程器。已有的发现与模拟和实验结果良好契合。
关键词: 同相降压 - 升压转换器 功率控制 燃料电池 增程器
- 介绍
增程的概念涉及利用高能源来提高车辆的续航能力。 FC的高理论效率,零排放操作以及低热量和声学特征使其成为替代内燃机(ICE)作为电动车应用中的高能源的最有希望的候选者之一。尽管如此,由于燃料电池的动态反应受到限制,与动态来源混合是必不可少的[1,2]。通常,瞬时负载功率PL可以是分解成两个分量:稳定(平均)功率,和零平均动态功率。典型的无人机(UA)包含单一能源(ICE或电池组),提供的两个组件。当需要安静或者无排放运行时,电力推进是首选。不幸的是,现代电池的有限能量密度限制了UA的操作时间。而且,由于典型的UA任务需要高起飞功率,所以高能电池由于功率能量的折衷而不能使用。作为一种解决方案,本文提出了将电源分成能量单
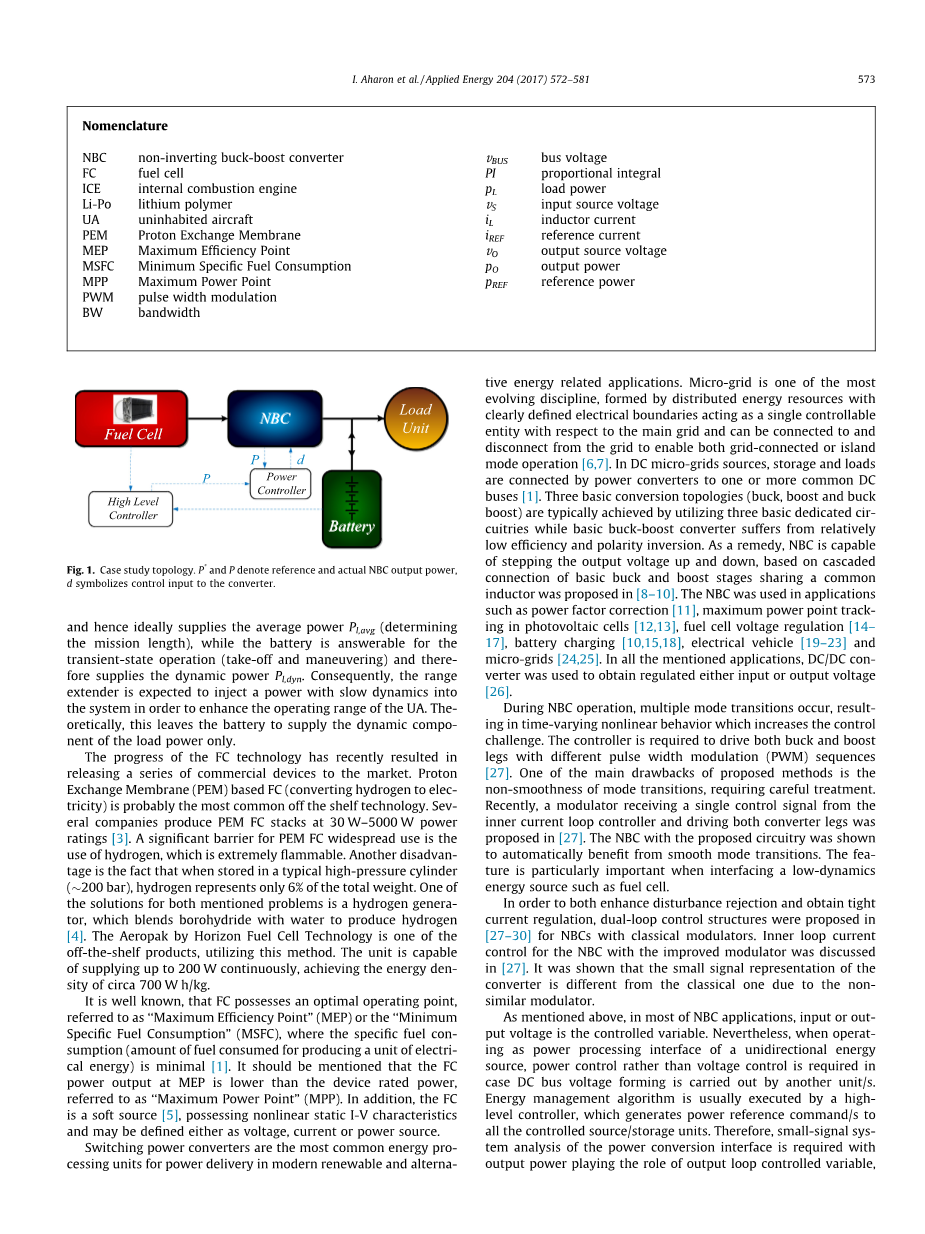
图1.案例研究拓扑, 和表示参考和实际的NBC输出功率,d代表转换器的控制输入。
元(FC)和功率单元(电池),从而创建了如图1所示的直流微电网。其中,FC负责稳态运行(巡航)并因此理想地提供平均功率(确定任务长度),同时电池负责瞬态操作(起飞和操纵),并因此提供动态功率。因此,增程器预计会向系统中注入动力缓慢的动力,以提高UA的运行范围。理论上,这使得电池只能提供负载功率的动态分量.FC技术的进步导致市场上推出一系列商用设备。基于质子交换膜(PEM)的FC(将氢转化为电)可能是最常见的现成技术。几家公司生产功率为30W-5000W的PEMFC堆栈[3]。 PEMFC广泛使用的一个重要障碍是氢的使用,这是非常易燃的。另一个缺点是,当存储在典型的高压缸(〜200巴)中时,氢气仅占总重量的6%。上述两个问题的解决方案之一是氢气发生器,它将硼氢化物与水混合生成氢气[4]。燃料电池技术Aeropak是现成的产品之一,利用这种方法。该装置能够连续供电200W,达到约700Wh / kg的能量密度。众所周知,FC具有称为“最大效率点”(MEP)或“最小特定燃料消耗量”(MSFC)的最佳操作点,其中特定燃料消耗量(生产所消耗的燃料量一个电能单位)是最小的[1]。应该提到的是,MEP处的FC功率输出低于设备的额定功率,称为“最大功率点”(MPP)。此外,FC是一个软源[5],具有非线性静态I-V特性,可以定义为电压,电流或电源。开关电源转换器是现代可再生能源和替代能源相关应用中用于电力传输的最常见能源处理单元。微电网是最具发展潜力的学科之一,由分布式能源形成,具有明确定义的电气边界,作为与主电网相关的单个可控实体,可连接至电网并与电网断开连接,以实现并网或孤岛模式操作[6,7]。在直流微电网电源中,存储和负载通过电源转换器连接到一个或多个公共直流母线[1]。三种基本的转换拓扑结构(降压,升压和降压-升压)通常通过利用三个基本专用电路来实现,而基本降压 - 升压转换器受到较低效率和极性反转的影响。作为一种补救措施,NBC可以根据基本降压和升压级的级联连接来提高和降低输出电压,这是在[8-10]中提出的。 NBC被用于诸如功率因数校正[11],光伏电池[12,13]中的最大功率点跟踪,燃料电池电压调节[14-17],电池充电[10,15,18],电动车辆[19-23]和微电网[24,25]。在所有提到的应用中,使用DC / DC转换器来获得调节的输入或输出电压[26]。在NBC操作期间,发生多个模式转换,导致随时间变化的非线性行为,这增加了控制的挑战。控制器需要用不同的脉宽调制(PWM)序列驱动降压和升压支路[27]。所提出的方法的主要缺点之一是模式转换不平滑,需要谨慎处理。最近,[27]中提出了一个调制器从内部电流回路控制器接收单个控制信号并驱动两个转换器支路。显示NBC与推荐电路自动受益于平滑模式转换。当连接诸如燃料电池等低动力能源时,该功能尤为重要。为了增强干扰抑制和获得紧凑的电流调节,在[27-30]中提出了具有经典调制器的NBC的双环控制结构。文献[27]讨论了用改进的调制器对NBC进行内环电流控制。结果表明,由于非相似的调制器,转换器的小信号表示不同于经典的表示。同时考虑到与其输入和输出终端连接的单元的行为。 本文研究了采用改进的双载波调制器工作于典型直流微电网的NBC,通过级联控制结构进行分析和运行,以调节输出功率。 设计简单的双回路控制器,分析系统性能整个预期的操作范围。作为案例研究,所提出的电路作为FC的功率处理接口工作,作为电池供电飞行器的增程器使用。选择NBC拓扑是因为Li-Po电池端子电压随着充电时,燃料电池的输出电压根据工作功率而发生显着变化。系统稳定性和鲁棒性分析也被给出为了验证在不同的操作极端的正确操作。建立并测试实验原型以验证所提出的分析的可行性。
2.系统建模
所研究的NBC如图2所示。功率级由两个同步变换器支路的级联连接形成,共用
一个共用电感L.高频旁路电容和旨在抑制变换器端子处的开关频率纹波。两个引脚由不同的PWM信号驱动,具有相应的占空比和,其中分 图3.调制器结构(顶部)和相应的波形(底部)。
别表示降压和升压引脚的占空比,来自调制器控制输入;在图2中,和分别代表转换器的输入电压,电感电流和输出电压。请注意占空比;导致开关Q1导通(断开)每个T,并关断(导通)一段时间。同样,占空比导致开关Q2(Q2)导通一段时间d2T并关断(导通)一段时间,其中T表示PWM开关周期。每条支线的操作来源于适当的基本转换器的行为。在的情况下,NBC被设置为以降压模式操作,即第一支路的开关由PWM信号驱动,而关闭,打开。相反,如果,NBC被设置为以升压模式工作,即,支路2的开关由PWM信号驱动Q1打开且Q1关闭。最后,如果(稍后将讨论限制),则两条支路均由PWM驱动,并且转换器工作在升降压模式。为了实现所提及的功能和操作模式之间的平滑过渡,使用[27]中提出的调制器,如图3所示。三角载波是 缩放,然后使用不同的移位因子进行复制以创建降压和增强级联载体。然后将控制信号-1 lt;d lt;1与两个载波进行比较,以便为每个支路创建PWM驱动信号。降压和升压支路的相应占空比由下式给出
其中和。然后转换器稳态电压传递函数和工作模式仅由控制输入决定为
其中D,VS和VO分别是d,vS和vO的稳态(DC)分量。
该系统的平均模型如图4所示(关于推导平均NBC模型的附加细节,有兴趣的读者可参考文献[27])。 此外,电感和两个导电MOSFET的集总寄生电阻标记为。 假定转换器(BUS1)的输入端口连接到由戴维南等效电路(VBUS1,rBUS1)表示的能源,而其输出端口(BUS2)连接到由戴维南等效电路(VBUS2)表示的微电网 ,rBUS2)与恒功率元件 [25]并联。
从图4可以看出,平均系统动力学是高度非线性的 通过
然后NBC输出功率可以得到
将(5)与(1)和(2)组合每个操作模式中的系统动力学可以表示为控制输入d的函数,作为
在降压模型中
在降压-升压模型中
在升压模式下。 显然,每种操作模式下的动态是不同的。
3.控制设计
图5a显示了NBC的典型级联控制结构[27]。通常,其中一个端子变量被选择为稳定的,即y可以表示输入或输出电压/电流/功率,是相应的参考信号,而内部环路控制器迫使中间变量x跟随外部控制器生成参考。这里,转换器输出功率被选为控制变量,如图5b所示。外环控制器(实际上是这里的功率控制器)生成电流参考信号,该参考信号在平均电流控制(这里采用)的情况下对应于电感器电流,在一个开关周期内平均。内部回路控制器处理当前的错误,并产生控制输入d到PWM模块[30-32]。
这两个环路在频域解耦以允许独立设计。此外,请记住,尽管NBC支路由两个不同的PWM信号驱动,但单个控制信号d足以创建具有相应占空比和的两个转换器支路驱动PWM信号。因此,d被视为控制输入,并且调制器被假定为受控过程的一部分。
3.1. 内部回路控制器的设计和分析
由于内部控制器的带宽(BW)远远高于外部控制器BW,因此输入和输出电压相对于电感电流的变化非常缓慢,因此在设计电流控制器时可以考虑它们。 然后给出NBC的电感器电流动态:
展示分段线性但依赖于操作模式的行为。 对拉普拉斯变换并重新排列结果
和
分别表示控制增益和扰动,D(s)表示控制信号d(t)的拉普拉斯变换。 选择一个PI控制器来补偿电流回路如下。 定义名义控制增益为
式(9)可以重新排列为
此处
因此,控制到输出传递函数由下式给出
因此,模式之间的转换从控制角度到干扰的阶跃变化是等效的,并且会被PI [33]或者II型[34]控制结构适当地拒绝。选择PI控制器
导致形式的标称闭环系统
其中和表示期望的闭环阻尼和自然频率。 此外,添加以下预过滤器
在参考信号上会使标称闭环系统达到标准的二阶形式
尽管如此,实际控制收益是G,由(10)给出,而不是GN。因此,实际闭环系统将由
在没有预过滤器的情况下
使用前置过滤器(18)。可以得出结论,当系统在单位直流增益下保持稳定时,闭环自然频率和阻尼根据NBC工作点和工作模式而变化为:
干扰抑制由下式给出
即尽管自然频率和阻尼变化,但DC处的零稳态误差始终保持不变。
3.2. 外环控制器的设计和分析
在级联控制结构中,内部环路与外部环路的去耦至少在频域有一个数量级,因此可以假设电感电流可以完美地跟踪其参考,如对于某些缓慢时变参考。 这个假设是在例如[31]。 因此,电感电流基准可用作功率回路控制输入。NBC输出电容器的动态是由下式给出的
此外,NBC输出功率可以从(5b)中获得。 因此,输出功率动态是非线性的,需要一个线性化过程。 将基于时间的变量分解为直流和交流分量,
并且代入(24)和(5b)导致以下电感器电流参考NBC输出功率小信号传递函数,
线性化在给定的操作点周围由
请注意,由于VBUS2和VO的值相近,仅与rBUS2电压降有所不同,所获得的传递函数是稳定的,并且工厂可以重新排列为以下一般形式,
和
还有
必须强调的是,D值在降压 - 增压和增压模式中是不同的,因此尽管一般表示方式相似,但并不相似。 选择一个PI控制器来补偿功率回路如下。 定义标称设备增益和时间常数
分别是标称对象给出
选择PI控制器
导致形式的标称闭环系统
其中表示所需的闭环带宽。 尽管如此,实际工厂是(28)而不是(33)。 因此,实际闭环系统将由
然后可以得出结论,当系统在单位DC增益下保持稳定时,一阶行为不再保持不变(由此产生的系统具有两个极点和一个稳定零点)。
干扰抑制由下式给出
即在DC处的零稳态误差始终保持,尽管参数变化。
4.设计实例
考虑图1的拓扑结构,其中相关的系统参数总结在表1中
根据(3)和(4),NBC的操作模式和控制信号的对应稳态值可以从
和
4.1.电流回路设计
所有可能的电流回路设备的系列如图6所示。标称设备通过选择标称FC和电池值分别为34 V和25.9 V来获得。
然后根据(16)设计电流环控制器, = 1, = 20,000 rad / s,无需预滤波器。 结果电流回路增益系列如图7所示,根据所得相位裕度(PM)范围验证所有工作点的稳定性。 相应的闭环跟踪和干扰抵抗能力在图3和图4中给出。 8和9分别进一步强化了上述分析的结果。
图6.当前环路设备系列。
图7.电流回路增益
图8.整个工作范围内的电感电流跟踪特性
图9.整个工作范围内的电流回路干扰抑制能力
图10.功率回路设备系列
4.2. 电源回路设计
所有可能的功率回路设备的系列如图10所示,其中标称设备是通过选择标称FC和电池电压分别为34 V和25.9 V,并假定标称NBC和负载功率为200 W和 250W。然后根据(34)设计功率回路控制器, = 10 rad / s(注意环路去耦假设的有效性)。由
全文共13302字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9453],资料为PDF文档或Word文档,PDF文档可免费转换为Word

