
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
四轮驱动双速变速器全电动汽车布局
De Pinto S.(1, 2), Camocardi P.(1), Sorniotti A.(1), Mantriota G.(2), Perlo P.(3), Viotto F.(4
摘要:为了提高车辆的加速性能和爬坡性能,本文提出了一种新型的全电动汽车布局,由两个传动系组成,每个传动系包括一个双速变速器。采用双速变速箱允许八种不同的档位状态组合,增加了为每个工作状态选择高效状态的可能性。为了补偿变速器换档过程中的扭矩间隙,通过改变另一轴上的扭矩,设计了一种扭矩补偿控制器。最后,通过与其他全电动汽车配置的比较,讨论了该车布局的加速性能、爬坡性能和换档性能的仿真分析。
关键词:两档变速器,四轮驱动纯电动汽车,无缝换档,扭矩填充
1 符号列表
|
术语 |
|
||
|
纵向加速度 |
延迟 |
||
|
传动比 |
希望得到的 |
||
|
质量惯性矩 |
差速器 |
||
|
扭转刚度 |
电动机 |
||
|
拉普拉斯算子 |
能量管理系统 |
||
|
转矩 |
等效的 |
||
|
时间 |
前、后、左、右 |
||
|
齿轮箱执行器位置 |
齿轮箱,1档,2档,分离档 |
||
|
变速时计算参考电机转速的无量纲因子 |
半轴 |
||
|
扭振阻尼系数 |
初始、最终、惯性阶段 |
||
|
效率 |
主轴、副轴 |
||
|
角位置、速度、加速度 |
所选传动比(1档、2档或空档) |
||
|
时间常数或纯时间延迟 |
启用扭矩加注 |
||
|
齿轮箱执行器 |
车轮 |
||
|
风阻 |
2 引言
随着不可再生能源价格的不断上涨和对高效汽车需求压力的不断加大,混合动力汽车(HEV)和全电动汽车(FEV)正逐渐成为解决交通问题的可行方案。电动机(EMs)通常有一个在低速时具有高最大转矩可用性的工作区域。在更高的速度下,它们的运行被限制在一个恒定的功率区域内,有时随后是一个功率随速度而减小的区域[1-4]。由于其在布局和包装方面的灵活性,以及与内燃机(ICEs)相比所需辅助系统数量的减少,电动机适合安装在不同的动力系统配置中[5-6]。
混合动力系统是由一个内燃机和一个或多个电动机组成的。EMs可以直接集成到传输系统中,无需进行重大修改,也可以通过功率分配装置(如行星齿轮组[7-9])耦合到内燃机上。与HEV类似,FEV也可以根据不同的布局进行开发。最常见的解决方案是采用单速变速器和差速器的中央电动机,以降低制造成本和重量。虽然现有的FEV通常采用单速变速器,但这种结构限制了它们的性能,特别是在以有限速度范围为特征的电动机的情况下。事实上,必须在爬坡能力(要求较高的传动比值)和最高速度(要求较低的传动比值)之间选择单个传动比作为权衡。在双速电动传动系统中,选择1档传动比是为了提供所需的纵向加速度和爬坡性能,而设计2档传动比是为了提供规定的最高速度。此外,由于电动传动系统的效率是扭矩和速度的函数,双速传动系统允许在选择电动传动系统的工作区域时增加灵活性,从而带来潜在的能效效益。通常,电动机的最大效率区域在转矩和转速的中间范围内。然而,关于多速电动传动系统效率变化和能耗效益的详细分析和实验验证在文献中仍然缺乏。
[10-12]表明双速传输系统是提高FEVs性能和效率的最合适的解决方案。[13] 提出了一种由电动机和行星齿轮组组成的双速变速器。[14] 描述了一种将行星齿轮组与双离合器组合在一起的双速变速器,用于将输出轴与太阳齿轮或行星齿轮架交替连接。[15-17]从安全和运行性能的角度,对每轴一台电动机的FEV和其他FEV配置进行比较研究。根据[15]和[16],单速四轮驱动(4WD)布局有两个电机(每个轴一个)具有各种优点,例如:i)即使两个电机中的一个发生故障也具有故障保护功能;ii)根据不同的工作条件分配驱动和制动扭矩的可能性。
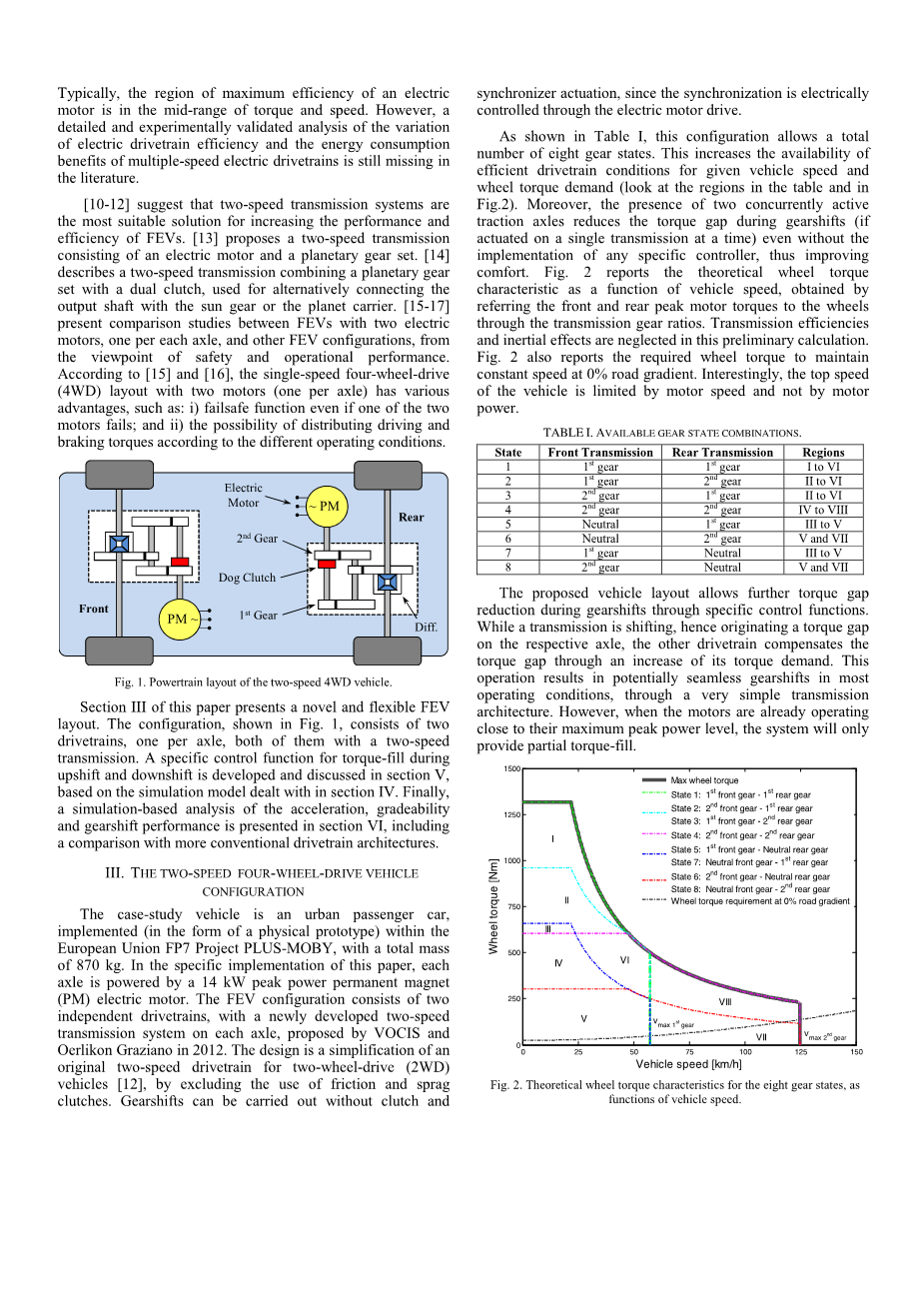
本文第三节提出了一种新颖灵活的FEV版图。如图1所示,配置包括两个传动系,每个轴一个,两个传动系都有一个双速变速器。第五节在第四节所述仿真模型的基础上,开发并讨论了升档和降档过程中扭矩填充的具体控制功能。最后,第六节对加速性能、爬坡性能和换档性能进行了仿真分析,包括与更传统的传动系统结构的比较。
图1 双速四轮驱动车辆的动力总成布局
3两速四轮驱动车型配置
案例研究车辆为城市客车,在欧盟FP7项目PLUS-MOBY内实施(以实物原型的形式),总质量为870千克。在本文的具体实现中,每根轴由一台14kw峰值功率的永磁(PM)电动机驱动。FEV配置由两个独立的传动系统组成,每个轴上都有一个新开发的双速传动系统,由VOCIS和Oerlikon Graziano于2012年提出。该设计是两轮驱动(2WD)车辆的原双速传动系统的简化[12],不包括摩擦离合器和楔块离合器的使用。无需离合器和同步器驱动即可进行换档,因为同步是通过电机驱动进行电气控制的。
如表1所示,该配置允许总共8个档位状态。这增加了给定车速和车轮扭矩需求下有效传动系条件的可用性(查看表和图2中的区域)。此外,两个同时激活的牵引轴的存在减少了换档过程中的扭矩间隙(如果一次在一个变速器上启动),即使没有任何特定控制器的实现,从而提高了舒适性。图2报告了理论车轮扭矩特性作为车速的函数,该特性是通过将前后峰值电机扭矩通过传动齿轮比参考给车轮而获得的。在初步计算中忽略了传输效率和惯性效应。图2还报告了在0%道路坡度下保持恒定速度所需的车轮扭矩。有趣的是,车辆的最高速度受车速的限制,而不受发动机功率的限制。
表1 可用的档位状态组合
|
状态 |
前变速器 |
后变速器 |
区域 |
|
1 |
1档 |
1档 |
1到6 |
|
2 |
1档 |
2档 |
2到6 |
|
3 |
2档 |
1档 |
2到6 |
|
4 |
2档 |
2档 |
3到8 |
|
5 |
空挡 |
1档 |
3到5 |
|
6 |
空挡 |
2档 |
5到7 |
|
7 |
1档 |
空挡 |
3到5 |
|
8 |
2档 |
空挡 |
5到7 |
提出的车辆布局允许在换档过程中通过特定的控制功能进一步减小扭矩间隙。当变速器换档时,相应轴上产生扭矩间隙,另一传动系通过增加其扭矩需求来补偿扭矩间隙。这种操作通过一种非常简单的传动结构,在大多数操作条件下都能实现潜在的无缝换档。然而,当电机已经接近其最大峰值功率水平时,系统将只提供部分扭矩填充。
图2 作为车速函数的八种档位状态的理论车轮扭矩特性
4 电动汽车动力学模型
图3 两速四轮驱动车型的布局
前后变速器以以下状态工作可以工作:i)一个主轴上的啮合齿轮(在前或后变速器上)和另一个主轴上没有啮合齿轮;或ii)两个啮合齿轮,每个主轴一个。由于传动系统(由变速箱和差速器组成)的间隙和内部扭转变形是二次近似效应,因此在随后的建模和换档控制分析中忽略了它们。为了评估车辆性能和换档质量,两个变速器都耦合了车辆纵向动力学的仿真模型(图3)。如果齿轮啮合,传动系统的一阶动力学已经建模,将系统视为从电动机到差速器的等效惯性。这种惯性通过半轴与车轮惯性相连,半轴被模拟为扭转弹簧和阻尼器。轮胎的模拟是通过Pacejka魔术公式模型与松弛长度[18]。
变速器可以在三种情况下工作,每种情况都由不同的方程式控制:A.挂一档:在这种情况下,主轴和副轴根据一档传动比旋转;B.挂二档:啮合爪形离合器,使主轴和副轴之间的运动比为二档传动比;和C.分离齿轮:在这种情况下,由于电机动力学与变速器输出轴动力学分离,传动系具有两个自由度。
由于后传动系统模型与前轴相同,因此仅报告前轴的方程式。
A. 挂一档
包括电动机在内的一档传动系的扭矩平衡由公式(1)给出:
(1)
为了简单起见,本文忽略了机械微分的内部动力学。过传递函数从电机转矩需求开始计算。公式中的效率,包括一档和差速器中的损耗,可根据通过联轴节的功率流方向反转。变速器效率通过一个查找表(由变速器系统制造商提供)表示,该表是输入扭矩、转速和工作温度的函数。传动系的等效惯性矩考虑了半轴、差速器、电机、主轴和副轴以及一档和二档的贡献。一档时,传动系的等效惯性矩由公式(2)给出:
(2)
B. 挂二档
在这种情况下,除传动比值外,系统动力学用类似于(1)的方程表示,而此时传动系的等效惯性矩由公式(3)给出:
(3)
C. 挂空挡
在这种情况下,主轴和副轴是分离的。该系统具有两个自由度:一)第一个自由度用于电机的旋转部件和与主轴刚性连接的传动系统部件;二)第二个自由度用于与差速器一起旋转的传动部件。在公式中:
(4)
其中,
(5)
永磁电机驱动的效率,包括风阻和摩擦损耗以及逆变器的效率,通过一个查找表来表示(由电机和变频器制造商提供),电机转矩、转速和工作温度的功能。
位于1档和2档之间的爪形离合器的轴向位置通过电液执行器控制。执行器的位置是通过纯延时以及具有时间常数的一阶传递函数建模的:
(6)
5扭矩填充换档控制
本节介绍换档操作。在换档过程中,变速器控制单元(TCU)修改能量管理系统(EMS)提供的电机扭矩需求。EMS前向总车轮扭矩需求分配设置为50%。根据图4所示的查找表,使用换档示意图。它们表示了启动换档时电机扭矩需求和车速的组合。为了避免严重的车轮打滑,其中包括一个牵引控制器。
图4 前后轴换挡示意图
例如,前轴上从1档到2档的升档(图5),而后轴在1档。只有在两个传动系上不同时执行升档时,才能实现扭矩填充。考虑到初始车速约为35 km/h,且加速器踏板位置(APP)等于30%,升档分为功能阶段。图5示出了:i)参考和实际前爪形离合器位置;ii)参考和实际前电磁速度;以及iii)机动期间前后电磁扭矩(参考和实际值)的时间历程。
换档控制器最初在涉及换档的传动系(本例中为前一传动系)上执行电机转矩滚转阶段(在图5中的点a和点B之间)。由于后电机在操作开始时以其最大扭矩的15%左右工作(根据已实施的驾驶性能图),后马达可以完全补偿前电机扭矩减小产生的扭矩间隙。在扭矩填充过程中,后电磁扭矩需求由以下公式(7)给出:
(7)lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238438],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

