英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
基于多支承的GTF航空发动机齿轮-转子-轴承耦合系统的载荷分担特性研究
摘要:基于齿轮涡扇发动机变速箱低压转子和风扇转子的多支承方式,建立了齿轮-转子-轴承(GTF)耦合动力学模型。探讨并量化了双转子轴承对GTF传动系统动态特性的影响,特别是双转子轴承位置对行星齿轮传动系统负荷分担特性的影响。动态模型中考虑了双斜齿轮的轴向、横向和旋转运动,充分考虑了轴承的时变支承刚度、齿轮啮合刚度以及多啮合和综合误差之间的相位关系。结果表明,双转子轴承的位置会影响GTF变速箱行星齿轮传动系统中各部件的均载性能和最大游动量,因此,可以对转子轴承的位置进行重新安排,以达到更好的振动控制和负载分配性能
关键词:GTF变速箱、行星齿轮传动系统、转子多支承、行星架弹性支承、均载性能
1.介绍
行星齿轮传动系统在航空航天工业中有着广泛应用。目前最先进的GTF航空发动机采用行星齿轮传动系统作为风机的主减速器形式,使低压转子高效高速运转,以匹配风机的最佳转速。行星齿轮传动由多个固定轴行星齿轮共享。整个传动系统采用功率分流、传动功率大、体积小、重量轻的固定轴齿轮传动,提高了系统的强度、刚度、使用寿命和可靠性。
对行星齿轮传动系统的振动特性和均载特性进行了大量的研究分析Kahraman对行星传动系统【1-5】进行了均载性能分析。Singh等人建立了行星轮系的动力学模型,研究了行星轮系的均载特性【6、7】。Carlos等人研究了轮齿【8】上的载荷分布。Shi等人探讨了风电机组齿轮传动【9】的动力特性。Mo等人建立了具有新结构的行星传动系统的分析模型,以研究其均载特性【10、11】。Wei等人建立了反映其尺寸结构和动态特性的模型,得到了多级行星轮系【12】的耦合振动特性。如今已经进行了一些对行星齿轮传动系统特有均载特性分析的研究。Mo等人对GTF行星齿轮传动系统进行了静载荷分析,得到了一系列系统静载荷的误差影响【13】,Mo等研究了GTF双螺旋齿轮的固有特性,得到了系统固有的几种振动模态。Wei等人研究了柔性销式输入轴双螺旋齿轮传动系统的动态均载特性,得到了不同输入轴类型对系统均载性能的影响【15】。Wei等人探讨了叶片脱落引起的不平衡对GTF航空发动机振动特性【16】的影响。Hao等人对GTF行星齿轮传动系统进行了振动模态研究,并与动力学分析结果【17】进行了比较。
近年来,对齿轮-转子-轴承系统也进行了研究。建立了高速齿轮-转子-轴承系统的有限元模型,研究了齿廓调整对系统动态特性的影响。Ling等人建立了齿轮-转子-轴承系统的新的非线性模型,得到了偏心距对振动响应的影响【19】。Tatar研究了三维行星齿轮转子系统的动态特性【20】。Lu等人提出了多级齿轮转子与箱体的耦合方法,得出了采用耦合箱体【21】可以降低齿轮箱振动水平的结论。欧阳等人对齿轮轴承系统的振动响应进行了实验和数值研究,准确识别了模型中的振动源【22】。
目前,国内外对GTF变速箱传动系统进行动力学分析的研究较少,而对齿轮箱转子与轴承的耦合研究也很少。因此,有必要对转子和轴承对系统动态响应的影响进行更深入的研究,在此基础上,进一步研究轴承位置和排列方式(输入轴和输出轴)对行星齿轮传动系统均载性能的影响。在行星齿轮传动系统的LSCS和浮动量计算中,需充分考虑轴承的时变支承刚度和啮合相位的时变啮合刚度。
2. GTF变速箱的物理模型
2.1GTF变速箱传动系统
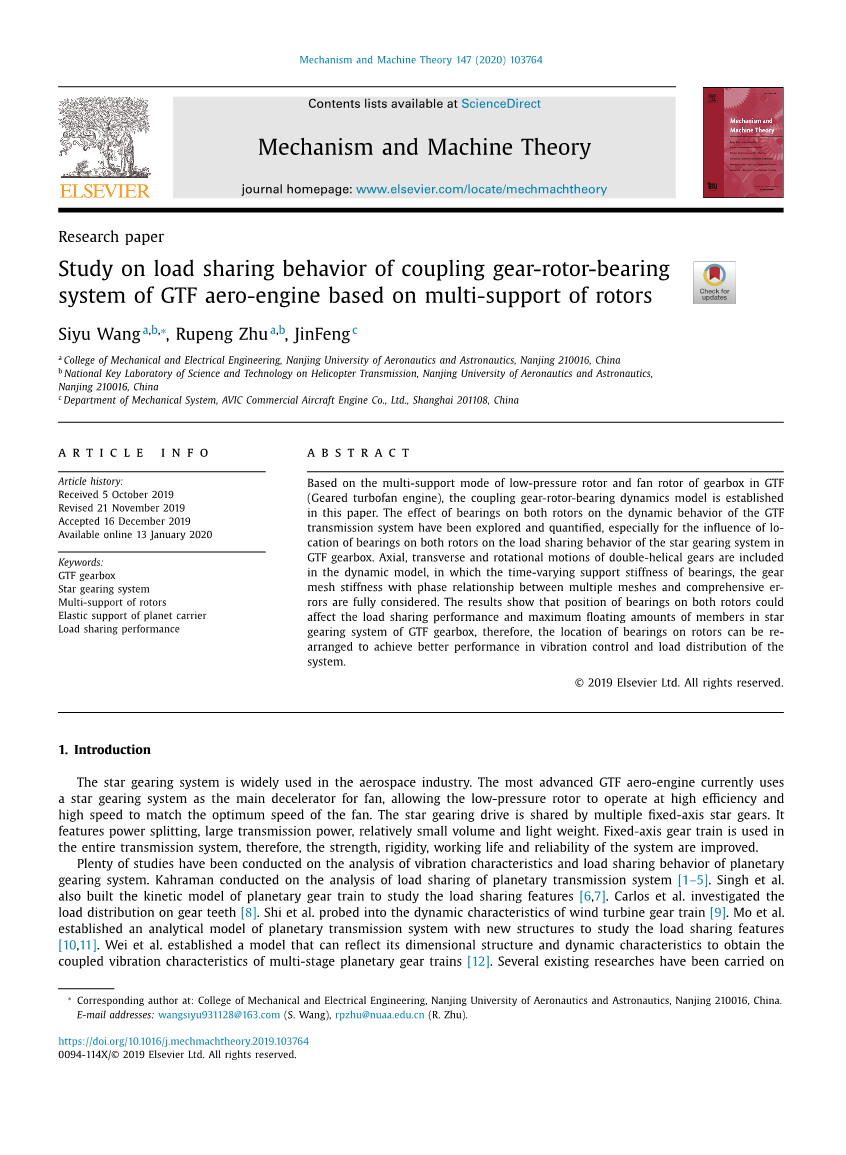
图1(a)显示了GTF航空发动机的三维模型,线所指的部分是变速箱和相关传动部件、低压转子(输入轴)、行星齿轮传动系统、行星齿轮架弹性支承座、风扇转子(输出轴)和风扇包含在传动系统中。
图1(b)展示了GTF发动机的传动系统结构【23】,GTF变速箱是一个简单的行星齿轮传动系统。风扇盘通过中心套筒轮齿连接到由圆锥滚子轴承支撑的风扇转子上,中心套筒轮齿又连接到齿轮箱的输出轴上。风扇转子不是直接连接到低压发电机,而是悬在两个并列的圆锥滚子轴承上。低压转子采用0-11两点支承。低压汽轮机后的滚柱轴承支承在汽轮机机壳后轴承上,低压转子支承在滚珠轴承上,低压压缩机后轴通过过渡短轴与低压转子连接。
2.2双螺旋行星齿轮传动系统
图2为GTF航空发动机双斜齿轮传动结构,风扇驱动变速箱采用五向分流人字齿轮传动结构,主要包括太阳齿轮、星轮、齿圈、行星架、输入和输出轴。太阳齿轮是一个浮动部分,与输入轴花键连接,与五个周向均匀分布的行星齿轮啮合。行星齿轮采用齿轮轴承集成设计【24】。行星齿轮由轴承内部支承,与齿圈啮合,齿圈是半浮动部件,作为齿轮系的输出,通过螺栓与输出轴连接;整个齿轮箱的重力和齿轮啮合产生的扭矩通过弹性底座支撑的行星架传递。
3.GTF传输系统动态模型
图3展示了带行星齿轮架弹性支承底座的GTF变速箱传动系统的结构图,根据GTF变速箱行星齿轮架的弹性支承模型,将行星齿轮架的自由度纳入系统动力学模型。图4所示为GTF变速箱传动系统的动态模型,采用集中质量法建立了输入输出轴和花键副的纯扭转非线性动态模型。
因为行星齿轮传动系统的齿轮是固定轴旋转的,所以在中心浮动部件(太阳齿轮、齿圈、行星齿轮架)和坐标系0,x y z是为每一个星齿轮建立的,其坐标中心是每一个星齿轮的旋转中心,x轴的方向是沿浮动构件的径向,y轴是沿中心浮动构件的切向。图5(a)所示为行星齿轮传动系统动态模型的左端面示意图。图5(b)是啮合的三维示意图,其中X轴垂直于太阳齿轮和第一行星齿轮的啮合线逆时针方向为正方向。
图5(C)显示了行星齿轮和行星齿轮架的耦合动力学模型。图6显示了内外啮合相位的关系,齿轮的每一侧有四个自由度(沿X-Y-Z方向运动和绕Z轴旋转)。不同的齿轮有上下标记。下标s、p、r分别代表太阳齿轮、行星齿轮和环形齿轮。上标L、r代表左端和右端齿轮。
在行星齿轮传动系统的动力学模型中,太阳齿轮和齿圈轴向浮动,假设所有的行星齿轮具有相同的支承刚度和阻尼。表示这些齿轮的支承刚度和阻尼,表示左右齿轮的扭转刚度,表示左右两侧太阳轮的啮合刚度和阻尼,表示左右两侧行星轮的啮合刚度和阻尼。采用Matter等提出的计算公式,可以得到刚度值【25】。
当每个构件的位移投影到啮合线上时,外啮合副在啮合线上的相对位移和内啮合副在啮合线上的相对位移可以表示为
式中为左(右)边太阳轮对啮合线的等效位移,为左(右)边行星轮啮合线的等效位移,为左(右)边太阳轮对的等效啮合误差,为左(右)边星环对的等效啮合误差,为行星轮的位置角,是外(内)啮合角。
内外啮合副的弹性啮合力和粘性啮合力可以表示为
表示旋转平面上输入转子的弹性变形,表示旋转平面上输出转子的弹性变形,可以表示为
其中,是输入轴(输出轴)的长度。是轴承质心与转子远端距齿轮平面的距离。
根据上述动力学模型,可以导出系统的动力学微分方程。由于两侧斜齿轮是完全对称的,并且可以相互推导,因此本文描述了左侧双斜齿轮传动系统的动力学方程。
3.1输入轴的动力学方程
输入轴和输入轴与太阳齿轮的花键连接的动力学方程为
式中为转动惯量,为旋转角度,为输入扭矩,为外(内)花键节距半径,和分别为扭振阻尼和接触阻尼,和分别为扭振刚度和接触刚度。
3.2输入轴上轴承的动力学方程
输入轴上轴承的动力学方程为
其中是轴承的质量, 是轴承在X,Y,Z方向的位移,是轴承的阻尼,是轴承力,是轴承的重力。
3.3太阳齿轮动力学方程
左侧双斜齿轮s-pi副的动力学方程
其中为左侧太阳齿轮的质量和惯性矩,为左(右)侧太阳齿轮在x,y,z方向上的位移,是左(右)侧太阳齿轮在z方向上的旋转角。
3.4行星齿轮的动力学方程
左侧双斜齿轮的动力学方程为
式中为左侧行星齿轮的质量和惯性矩,左右侧行星齿轮的X,Y,Z方向的位移,为左右侧行星齿轮的Z方向的旋转角。
3.5行星架动力学方程
行星架动力学方程为
式中为行星载体的质量,为行星载体的转动惯量,为载体在X,Y,Z方向上的位移,为载体在Z方向上的旋转角。
3.6齿圈的动力学方程
左侧双斜齿圈的pi-r副动力学方程
是左侧齿圈的质量,是左侧齿圈的惯性矩,是左侧齿圈在X,Y,Z方向上的位移,是左侧齿圈在Z方向上的旋转角。
3.7输出轴轴承的动力学方程
输出轴轴承的动力学方程为
其中是轴承的质量,是轴承在x,y,Z方向上的位移。
3.8输出轴动力学方程
输出轴和风扇花键连接的动力学方程为
其中是转动惯量,是旋转角度,是输出扭矩,是外(内)花键的节圆半径。
4.GTF传动系统动力学模型的求解
将输入轴、输出轴及相应的花键联接和轴承、行星齿轮传动系统等动力学模型综合起来,得到了GTF变速箱传动系统具有8N 35自由度的整体耦合动力学模型。因此,系统的广义位移阵列可以表示为
动力学方程可以用矩阵的形式表示
其中[M]为质量矩阵,包括传动系统各部件的质量和等效质量,[C]为阻尼矩阵,包括齿轮啮合阻尼和轴承阻尼,[K]为刚度矩阵,包括传动系统各部件的支承刚度、扭转刚度、啮合刚度和轴承刚度,Xis传动系统自由度的柱矢量,[F]为激励的柱矢量,包括重力激励和时变刚度激励。
4.1具有啮合相位的齿轮时变啮合刚度计算
啮合阶段包括外部啮合对之间的啮合阶段、内部啮合对之间的啮合阶段以及内部和外部啮合对之间的啮合阶段。定义为第i外啮合相与参考相之间的啮合相系数,以太阳齿轮和第一行星齿轮的测量相为参考。为第i内啮合相与参考相的啮合相系数:以第一行星齿轮与齿圈的啮合相为参考,为外啮合与内啮合相的啮合相系数。因此,各啮合副的啮合刚度关系和啮合误差关系如下
其中为内外啮合时变啮合刚度,为啮合周期。
因为太阳齿轮和星轮的相对扭转方向与星轮的相对扭转方向相反,因此两者的啮合相位系数符号相反,推导出引用的公式【26】如下
式中,dec为小数部分,为太阳齿轮和齿圈的齿数,N为行星齿轮的齿数。
其中v为端面啮合点的移动速度,为啮合周期,为行星齿轮和太阳齿轮的基圆半径,为行星齿轮齿数,为端面压力角,和为内外啮合的啮合角。
4.2滚动轴承时变支承刚度的计算
滚柱轴承由外圈、内圈、滚动体和保持架组成。假设内圈与转轴刚性连接,外圈与轴承座刚性连接,滚动体在内圈与外圈之间等距排列,滚动体与滚道之间的滚动为纯滚动,因此,轴承的变形主要是由于滚动体与滚动路径的接触引起的。
文献27指出径向力Fr与变形之间的关系,定义为
式中,ki和ke是与轴承几何和材料有关的系数,Dg是滚动元件的直径,Di是轴承内圈和滚动元件之间接触位置的直径,De是轴承外圈和滚动元件之间接触位置的直径,Pi为滚动体与内圈的接触曲率半径,为滚动体与外圈的接触曲率半径,Z为加载滚动体的个数。
将公式(17)中的系数组合得到以下方程
其中是赫兹接触刚度系数
轴承支承刚度定义为
由公式(19)可知,轴承支承刚度不是一个常数,它会随着位移的变化而变化,因此滚动轴承可视为一个刚度可变的硬弹簧。
4.3荷载分担系数的计算
行星齿轮传动系统的均载性能用LSC表示。LSC越大,输电系统的负荷分布越不均匀。双螺旋齿轮传动系统采用内外啮合的LSCS来表示系统载荷分布的平衡。求解系统动力学方程得到系统振动响应,然后代入式(2)得到齿轮啮合力。将齿轮左右侧叠加,得到双螺旋齿轮的啮合力,如下图所示
这里表示太阳齿轮和第n个行星齿轮之间的啮合力,表示齿圈和第n个行星齿轮之间的啮合力。
双螺旋行星齿轮每对齿轮的LSC定义如下:
那么行星传动系统的内部和外部LSC为和
5. GTF传动系统动力学分析
5.1 GTF传动系统基本参数
本文所用行星齿轮传动系统的基本参数如表1所示。
各误差参数按五级精度选取,如表2所示。
GTF变速箱有两对花键接头,一对用于输入轴和太阳齿轮之间传递扭矩,另一对用于输出轴和风扇之间传递扭矩。夹板的基本参数如表3所示。
输入轴和输出轴的轴承被选作表4所示。
转子的长度和轴承的位置如表5所示。
5.2 GTF传动系统的振动特性
研究了行星齿轮传动系统中,当输入输出轴轴承位于相应轴的中间位置时,各构件的浮动轨迹。图7(a),(b)显示了太阳轮和齿圈的浮动轨道,由图可以看出太阳轮的振动幅度远大于齿圈的振动幅度,这是由于支承刚度的差异造成的,由于输入轴的轴承尺寸大于输出轴的轴承尺寸,所以太阳齿轮的支承气密性小于环形齿轮,而输入轴和输出轴分别与太阳齿轮和环形齿轮连接。图7(c)显示了星齿轮的浮动轨道,星齿轮的振动幅度基本相等,但由于其位置角和相位角的不同,浮动范围也不同。将载体的自由度代入行星齿轮传动系统后,载体的浮动轨
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238337],资料为PDF文档或Word文档,PDF文档可免费转换为Word

