
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
用于换道的静态输出反馈控制
摘要---本文讨论了在换道操纵期间车辆的横向控制。拟议的设计程序通过使用成本效益高的传感器实现,对测量变量的适应性以及对未测量变化参数的鲁棒性的控制问题。这是通过具有预览信息的静态输出反馈控制器实现的。唯一测量的是传感器位置的横向位移和相对于车道中心线的偏航角。车辆的横向模型通过积分运算,使误差信号和预览参考信号得到增强。由于使用了消除非线性项的松弛方法,因此使用了LMI框架对控制器进行了综合分析。针对各种情况进行了仿真,展示了设计方法处理不同性能目标的能力。
1 介绍
在过去的三十年中,一些研究工作解决了车辆在车道自动驾驶保持操纵稳定性问题。从经典的PID控制器到先进的鲁棒和非线性的方法,已经应用了多种控制方法。目前,一些市场车辆已经装备有主要在标称驾驶条件下工作的行车道保持系统。然而,完整的车辆自动化还需要换道操纵处理,以便允许更灵活地使用道路的容量,并确保车辆可以移交驾驶员,以避免换道而发生碰撞。
进行自动变道操纵将真正提高驾驶舒适性和安全性[1]。换道涉及一侧的纵向和横向动力学以及车辆在道路上相对于其他车辆的位置。相比之下,自主车道变更很少被解决。主要工作集中在允许进行换道操纵的交通条件和路径规划的计算,以设计从当前车道到相邻车道的行车轨迹。在[4]中已经研究了何时以及如何执行车道变更模型的问题。确定可行性,分析问题[3],决定是否可能进行换道,机动车产生在[5]和[19]。当相应的时间间隔内有适当的换道时间间隙时,通过控制横向和纵向运动来启动操纵。变道操纵已被视为运动学研究的问题之一。
这项工作已作为巴黎萨克莱大学研究项目的一部分。使用模型预测控制,解决了轨迹规划和控制问题。先前已有各种研究将MPC应用于自动驾驶车辆的轨迹规划和运动控制[7],[8]。其他控制方法已用于控制内环中的轨迹。在控制器设计方法中,环路整形的鲁棒Hinfin;控制已在 [11]中应用。在[12]中已经引入了一种Hinfin;控制器,该控制器将闭环组件与预滤波器控制器相结合,可以实现对鲁棒的模型参考跟踪。在[13]中已经考虑了模糊控制器。在与驾驶员合作的情况下,换道操作也得到了处理[14]和[15]。在[16]和[17]中已经考虑了在不利条件下进行的操纵。在[18]中,已经提出了在紧急车道变更操纵期间的控制方面。[19],[20]中提供了有关自动公路车道变更策略的诸多结果,[21]包括控制方法。本文的目的是设计一个非常简单并且可实现的控制器。输出反馈控制器克服了访问整个状态向量的必要性,并且避免了使用观察器来对其进行估计。在不同的控制目标下考虑了动态输出反馈,这些目标被转换为线性矩阵不等式(LMI)条件[23]和[24]。在LMI框架下,静态输出反馈很难设计。在[25]和[26]中已经通过引入有关系统输出矩阵的变换矩阵进行了分析。在[27],[28]和[29]中提出了针对不同类别系统的进一步改进。即使静态输出反馈控制器的设计更为复杂,它也可以直接将测量结果映射到控制输入,从而对控制器的动作做出简单的解释。另外,通常设计控制器以确保系统的稳定性。但是,我们通常希望输出跟踪预先已知的给定参考信号。
增强轨迹跟踪的控制器性能的一种简单方法是预览操作,这些预览操作考虑了参考轨迹的反馈条件[30],[32]和[34]。预览范围是可调的,并且直接影响系统的性能。
本文提出了一种静态输出反馈控制器的设计,该控制器包括车道变更参考轨迹的预览。控制器使用唯一可用的测量值,即横向位移和相对偏航率。车辆横向模型在多种前进速度中测试,并将前进速度作为变化参数[28]和[31]。
这推导出具有四个子模型的系统。此外,系统中还增加了一个积分器,以确保恒定曲率时零稳态误差。接下来,使将要跟踪的参考信号的预览信息包含在模型状态空间向量中。因此,线性矩阵不等式(LMI)框架合成了静态输出反馈控制器。该控制器反馈误差信号,测量值和参考信号。在几种条件下对控制器进行了测试,这些条件突显了所提出方法的性能。
本文的其余部分安排如下。第二部分专门用于多主题车辆横向模型的开发。本节还详细介绍了控制目标。 第三部分着重于控制器设计的系统适应性。控制器显示解决LMI问题的结果,在该问题中事先选择了一些参数。第四部分考虑了在不同条件下的一些模拟测试,并讨论了一些实际的设计调整。最后,第五节提供了一些 结论和未来的工作。
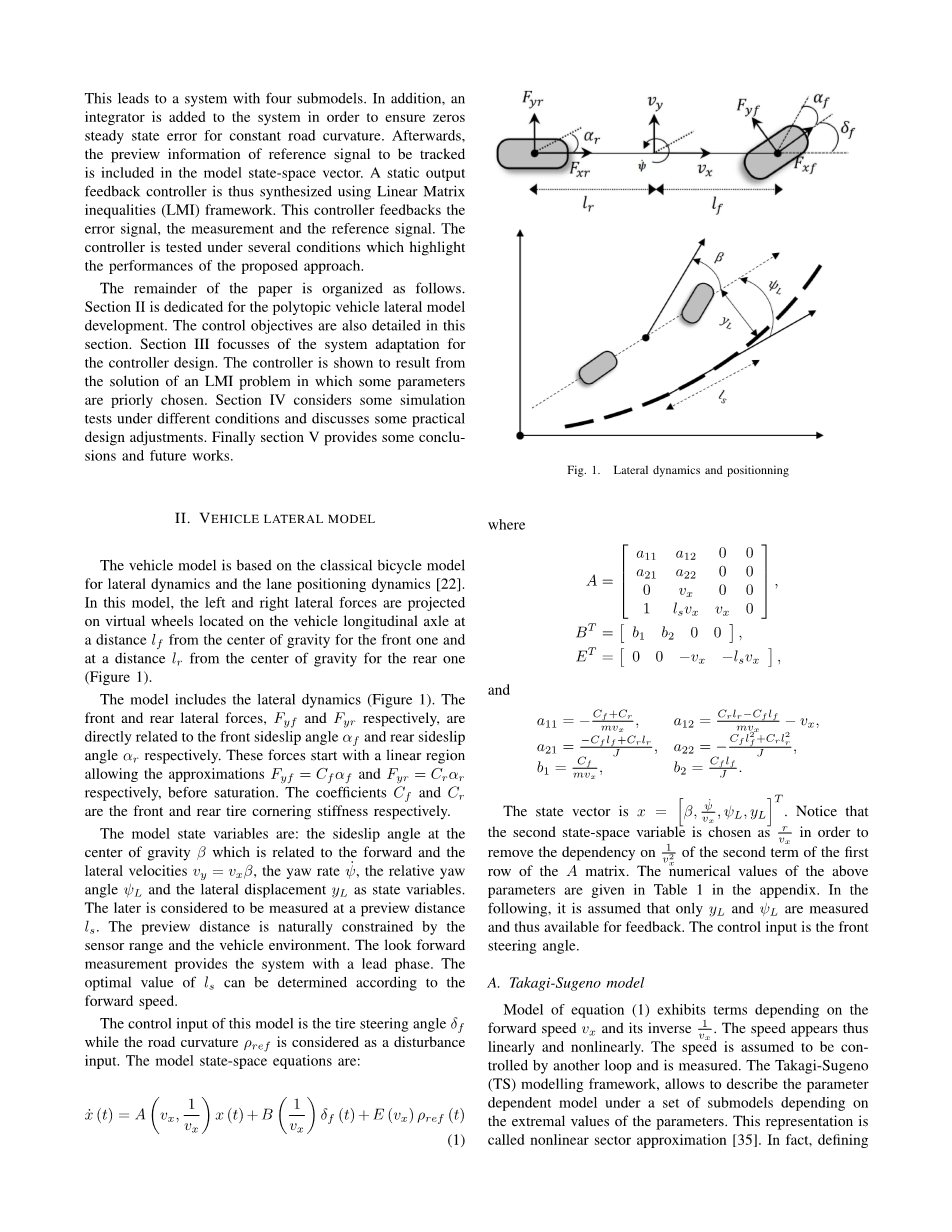
图1.横向动力学和定位
II. 车辆横向模型
车辆模型以经典的自动驾驶车模型为基础用于横向动力学和车道定位动力学[22]。在这个模型中,左右侧向力被投射出来,虚拟车轮位于车辆的前一个纵轴和重心之间,距离后一个物体的重心有一段距离(图1)。模型包括横向动力学(图1)
前侧向力为Fyf,后侧向力为Fyr,
前轮和后轮侧滑角分别alpha;f和alpha;r。
这些力从一个线性区域开始分别近似为Fyf = Cfalpha;f和Fyr= Cralpha;r。系数Cf和Cr分别为前、后轮转向刚度。模型状态变量为:侧滑角重心向前偏移量和有关的beta;横向速度V = Vxbeta;,偏航率psi;˙。相对偏航角psi;L和横向位移 yL和侧向位移作为状态变量。后者被认为是在预览距离测量ls。预览距离自然受到约束传感器范围和车辆环境的限制。测量为系统提供了一个超前预判阶段。向前的速度可确定最小二乘的最优值。
这个模型的控制输入是轮胎的转向角delta;f,然而道路曲率rho;被认为是一个障碍输入。模型状态空间方程为:
这里
并且
状态向量是 。 注意,第二个状态空间变量被选择为r/Vx删除对的依赖第一项的第二项矩阵A的行向量。上面的数值参数见附录表1。在此之后,假定只测量yL和psi;L,这样就可以得到反馈。在前面控制输入操纵角。
A:Takagi-Sugeno
模型式(1)的模型的项依赖于前进速度Vx和它的倒数1/Vx。速度是线性和非线性的。速度假定被另一个环控制并且可以测量 ,Takagi-Sugeno模型框架,允许描述的参数依赖于一组子模型下的模型参数的极值。这称为非线性扇区近似[35]。事实上,定义rho;1 = Vx和rho;2 = 1 /Vx,四子TS体系实现
此处
并且
矩阵, 从下面公式中获得。
注意,获得的模型是一个精确的表示(1)式的模型在紧集Vmle;Vxle;Vm。所得模型为连续时间模型。但是对于实现方面和何时考虑预览信息,考虑它在离散时间域会更方便。事实上,预览信息只是在某些传感器采样时间可用。模型采用简单的欧拉方法进行离散化的离散时间状态空间模型T = 0.05秒。
此处
Ш 控制器设计
在下面,道路曲率被认为是常数。对式(3)两边取差分算子得出:
注意,由于道路曲率被视为是常数,用差分算子消掉它方程。另外,积分输入是在控制输入将确保零稳态误差循环弯曲。
现在我们定义误差信号e(k)为差值在输出y(k)和参考信号r(k)之间跟踪,
我们定义增广的状态向量xtilde;=eT (k),Delta;xT (k) T。增强状态空间系统为:
此处
假设参考信号的值已知,下面来定义向量
并且,矩阵
现在的目标是嵌入出现的参考信号在等式(6)中将其转换为状态向量。 这是通过实现
定义状态向量
允许获得增强系统
此处
现在的目标是设计一个静态输出反馈控制器的形式
这个控制器结合了四种增益,每种增益分别用一个子模型。事实上,参数的实时可用性允许适当的增益值。
当将控制器(8)加入增广系统(7)时,很容易得到闭环系统:
收益Kj(1lt;jlt;4),需计算的系统(9)是渐进稳定的,这意味着和误差e(k)是x^(k)的一部分,这也确保了limk趋近于正无穷大
实际矩阵获得Kj不是简单的处理利用LMI技术的一方面,由于设计一个静态输出反馈的内在困难,另一方面交叉项的影响。实际上,静态输出反馈的合成主要是一个双线性矩阵不等式问题(BMI)。已经开发了几种涉及等式的约束方法。以[33]为例,提供了一种松弛法。
本文对[34]进行了修正。它允许引入松弛条件和参数依赖矩阵其定义如下:
[34]提供的结果后,给出一个积极的标量V和矩阵Q,W(兼容的维度,如果存在矩阵使得
此处
和
(13)
则系统(9)是鲁棒渐近稳定的,增益矩阵可由
(14)
Ki = LiU - 1
则系统(9)是鲁棒渐近稳定的,增益矩阵可由可以注意到,这个矩阵增益包括以下几个部分
(15)
因此,命令增量由
(14)
Ki = LiU - 1
(16)
此处
最后得到控制输入
Ⅳ仿真结果
考虑的车辆速度范围从Vm 的变化控制器增益通过求解LMI(12)来计算。在直路上变道
车道改变策略是首先进行直路发起在时间t = 1秒。样品时间设置为t = 0.05秒。5样品的参考信号构成的增量值0.6米,1.2米,1.8米和2.4米然后达到3 m的值对应于相邻车道的位置。其概要如图2所示。经过10秒的时间后,车辆自动回到初始车道,模拟一种避障机动。
带有预览控制器的系统响应以实线显示,而没有预览操作的系统响应以虚线显示,如图2所示。最终参考值在(0.2、0.4、0.6、0.8、1)times;3m的5步内。所需的转向角如图2所示。图2中第三、四图分别给出了侧移速度和偏航率,图2第五、六图分别给出了相对偏航角和侧移量。转向角平稳,侧向速度有限,且小于2m/s,在舒适范围内。该机动在3秒内完成,侧向位移的超调非常有限(图2),跟踪参考信号没有稳态误差。
通过比较图2中的实线和虚线,可以看出使用预览信息进行控制的好处,因为使用相同的设计过程,但是没有预览控制器会导致虚线中提供的响应更慢。
B弯道换车道
车道改变机动现在被认为是在一个弯道的曲率rho; = 1/250mminus;1。自动变道机动3秒后进入弯道。在这段时间结束后,弯道开始进入系统,作为恒定的步长输入。结果如图3所示。当曲率作为一个摄动时,它对具有非零稳态值的不同状态空间变量的图的影响是可见的。这些值对应于圆周上的静止值。即使响应在瞬态阶段出现超调,在满足所有要求的情况下,性能仍然良好。
图3所示。弯道变道机动
C.低摩擦路面变道
道路摩擦力会发生变化,但其值无法测量。即使它是不可能使控制器自适应这些变化,仍然可以计算多面体的控制器系统由子模型取得极值的道路附着刚度cf和cr。这些系数表现为线性参数状态方程矩阵。结合速度变化,得到了16个子模型的多面体系统。
假设每个控制器对其中一个顶点的贡献为25%,计算控制器。在整个仿真过程中,前后轮的路面摩擦力降低了30%。图4显示了实线中的标称情况和虚线中的低摩擦情况的结果。后者更具有振荡性,但仍可接受,接近名义情况。这证明了控制器处理这种情况或减少道路摩擦的能力。
结论
针对地面车辆,提出了一种具有前馈补偿的静态输出反馈方法
图 4所示 弯道机动换道,减少摩擦
自主变道操纵。该控制方法考虑了参考信号预览,允许机动过程中的轨迹跟踪。将包含变车速的车辆模型离散化,采用误差系统方法得到参数相关的增广系统。然后利用LMI条件推导出速度相关的静态输出反馈。在其扩展形式中,它包括输出的静态反馈、跟踪误差的积分和预览动作。设计参数允许对性能产生影响的系统。仿真结果说明了预览控制的优点,允许在暂态阶段调整行为,并确保零跟踪误差。预览距离有限的情况下,有限的未来信息的表达特别方便。
附录表1
车辆参数和值
参考文献
[1] T. Vaa,M。Penttinen和I. Spyropoulou,“智能运输系统及其对道路交通事故的影响:最新技术”,IET负责人。运输系统,卷。 1(2),第8188页,2007年6月。
[2] J. Nilsson,J。Silvlin,M。Brnnstrm和E. CoelinghIf,“何 时以及如何在高速公路上进行车道变更演习”,《 IEEE智能交通系统杂志》,第68-78页,2016年。
[3] M. Althoff和JM Dolan,“使用可达性分析对自动道路车辆进行在线验证”,IEEE Trans。机器人卷30(4),第903918页,2014 年。
[4] J. Nilsson , J 。 Silvlin , M 。 Brnnstrm , E 。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237299],资料为PDF文档或Word文档,PDF文档可免费转换为Word

