
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
结合了性能和稳定性的四驱的中央分动箱主动控制方法
Giulio Panzani, Matteo Corno, Mara Tanelli, Annalisa Zappavigna, Sergio M. Savaresi Andrea Fortina, Sebastiano Campo
摘要:新型配备有扭矩偏置装置的传动系统架构,例如主动差速器和主动分动箱,已经使新一代适时四驱车辆问世,该四轮驱动车辆允许设计能够改变其机械布局所决定的汽车性能的控制系统,例如,转向不足和转向过度的特征。这项工作提出了一种主动分动箱控制器,其目的在于根据传递到地面的牵引扭矩的数量来优化车辆性能,同时通过将车辆的侧滑角保持在安全范围内来保证车辆的稳定性和可驾驶性。
1.简介和目的
在最近的四轮车辆中,电子稳定控制系统(ESC)旨在提高关键驾驶条件下的乘客安全性,现在它已成为大多数商用车的一部分。科学文献中已经提出了几种主动底盘稳定性控制的解决方案,其共同目标是通过产生适当的偏航力矩来主动改变车辆动力学,以在发生危险动作时恢复车辆的稳定性,例如参见[1],[2]。通过电子控制系统改变汽车性能的能力,原则上是由其机械布局决定的,这为所谓的全球底盘控制开辟了道路,在该系统中,可用制动器,转向和牵引力等组合执行器的组合管理用于控制汽车。车辆的整体性能,例如参见[3],[4]及其参考。在用于车辆稳定性和操纵性的偏航控制系统领域中,大多数可用的解决方案都是基于制动器的,例如参见[5]。这些方法通过差速制动对车辆施加不足或过度转向行为,从而试图提高弯道时的车辆性能和稳定性。然而,基于制动的系统已经显示出会降低车辆的纵向性能,特别是在强加速操作期间[6]。
通过在车辆传动系中使用新一代扭矩偏置装置(主动差速器或主动分动箱),提供了基于制动的解决方案的替代方案,可以对其进行控制以主动在前桥和后桥之间分配驱动扭矩,从而提高制动性能。 稳定性和性能,参见例如[7]。配置并使其更接近于完整的前轮驱动以追求安全目标,或接近四轮驱动以通过平衡分配给四个车轮的扭矩来优化性能。
在本文中,基于中央分动箱的主动控制,提出了一种将性能与操纵性能相结合的控制策略,该控制策略允许调节要重定向到后桥的扭矩量。
从控制设计的角度来看,旨在优化车辆性能同时保证稳定性和操纵稳定性的控制系统提出了几个问题。首先,从真正的反馈角度处理所考虑的问题,既需要选择最佳的控制变量,又需要生成适当的参考信号。其次,要使用经典工具进行控制器设计,需要有意义的但易于处理的动态车辆模型。对于控制变量的选择,与车辆稳定性有关的最有意义的变量是车辆侧偏角,即车辆纵轴与车速方向之间的角度。然而,很难在所有行驶条件下获得车辆侧偏角的估计值,并且很难将其用作控制变量[8],[9],[10]。此外,选择合适的参考轨迹并不是一件容易的事,因为它对车速敏感,最重要的是对道路摩擦条件敏感。在车辆建模方面,考虑到的控制器必须处于活动状态的驾驶条件非常复杂,结合了强劲的加速度和在低抓地力道路上的转弯性能。因此,线性化模型似乎表现力不足,无法采用,并且完整的车辆非线性模型对于控制设计目的而言过于复杂。
因此,在这项工作中,提出了一种监督控制体系结构,该体系结构通过打开或关闭分动箱的切换策略来处理性能与稳定性之间的权衡,从而选择要重定向至后桥的扭矩量。 控制器调整阶段是通过基于仿真的方法中适当成本函数的优化来执行的,其中多体仿真器CarSim R用作车辆模型。
2.系统架构
所考虑的车辆是按需四轮驱动车辆,其中发动机扭矩可以通过电子控制的分动箱转向后轴。分动箱可用的总扭矩可计算为
(1)
其中是发动机扭矩,是齿轮箱效率,是齿轮箱增益。分动箱所需的扭矩与前后轴速度差成正比即
(2)
其中k为分动箱等效刚度模型,前后桥角速度计算为
(3)
其中omega;ij,i = {f,r},j = {l,r}是四个车轮的角速度,和分别是前后差速比。通过调节分动箱液压回路中的阀开度,可以主动修改等价的分动箱刚度k值,请参阅公式(2),该值可以在最小值和最大值之间变化。为了考虑阀的动态特性,采用了建立时间为70ms的低通滤波器。
在随后的等效分动箱中,刚度k将被视为控制变量。这是由于当前的分动箱技术允许通过打开或关闭相关联的阀仅命令分动箱等效刚度的这两个极值之一。
总而言之,在所考虑的动力传动系统架构中,引导至后轴的扭矩的比例由给出。因此,可以将前轴Tf处可用的扭矩计算为
3.控制器设计
本节说明了整个控制器设计过程。首先,介绍所采用的稳定性和性能指标,以及所选的测试驱动器。此外,将详细介绍控制器的结构并讨论调整阶段。 最后,进行灵敏度分析以调查控制器相对于车速和轮胎-道路摩擦状况的鲁棒性。
- 稳定性和性能指标
由于所提出的控制系统的总体目标是在关键机动中以最优方式管理性能和稳定性之间的折衷,因此需要定义适当的成本函数以提供此类特性的定量描述。 具体而言,性能被认为是将最大的横向横向力传递到地面的能力。因此,衡量性能的自然成本函数为
其中和分别是第i个车轮的纵向力和横向力。注意,就车辆的动态性能而言,在转弯时最大程度地提高JP意味着要避免达到较大的纵向和横向车轮打滑值,从而提高车辆正确遵循转向指令施加的期望轨迹的能力。
另一方面,车辆稳定性的概念与驾驶员对安全性和驾驶性的感觉有关。 最能说明稳定性的动态变量是车辆侧滑角beta;。beta;的值较大并不一定意味着车辆动力学不稳定。但是,随着beta;的增加,驾驶员会失去安全管理当前操纵的能力。根据专业驾驶员的观点,保证驾驶性能的beta;值的合理阈值为5°,[2]。
这样,成本函数量化稳定性为
在整个操作过程中,这会使车辆的侧滑值超过安全等级5ordm;。注意,对于现有的文献(例如,参见[2]),其中在控制器设计中结合了硬的,逐点约束beta;<5°,在此提出了用于稳定性的积分成本函数。我们认为,这更好地反映了驾驶性和操控性是驾驶员依赖的感觉这一事实,因此应以连续的方式加以量化。
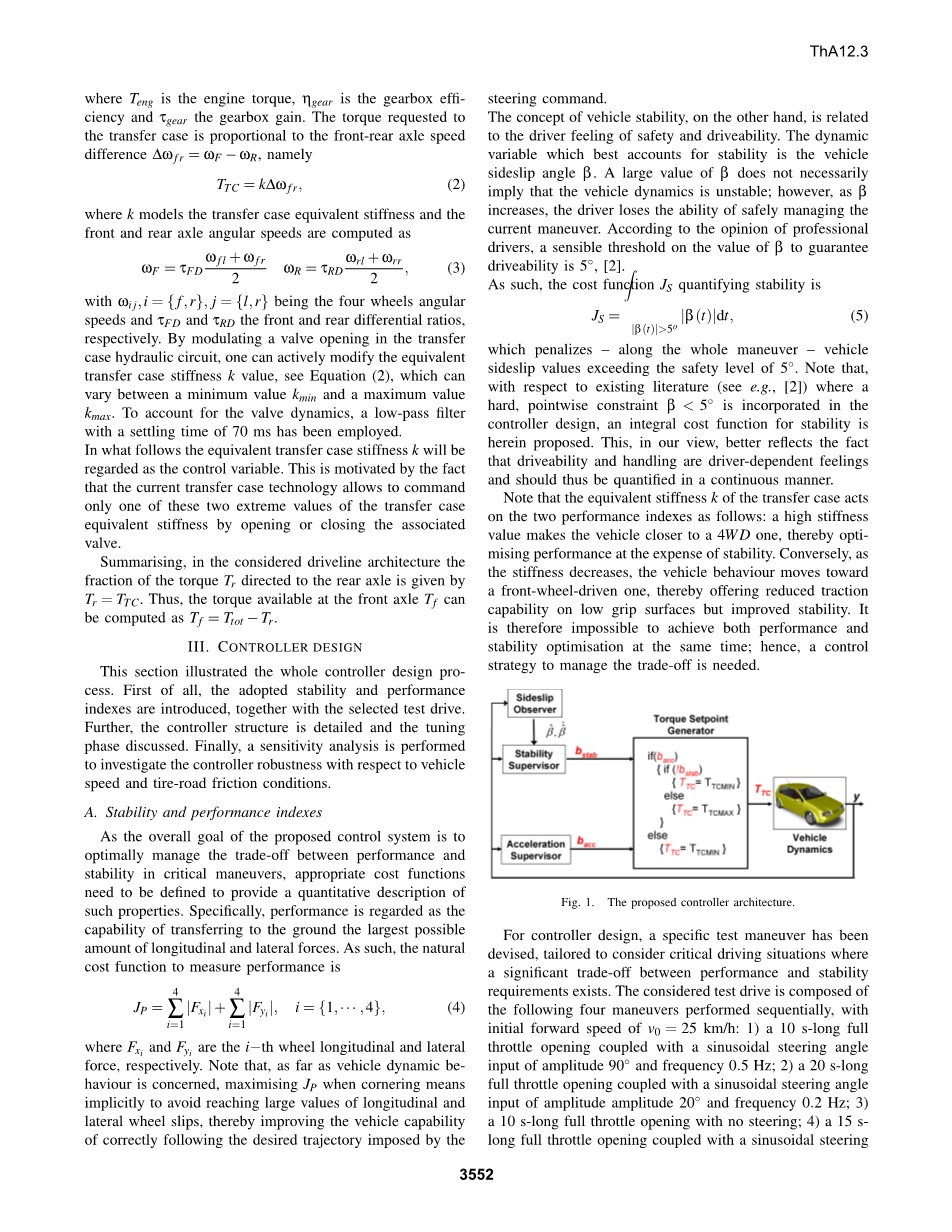
请注意,分动箱的等效刚度k作用于以下两个性能指标:高刚度值使车辆更接近四轮驱动车辆,从而在稳定度方面优化了性能。反之,随着刚度降低,车辆行为会朝着前方行驶- 轮驱动式,从而降低了在低抓地力表面上的牵引力,但提高了稳定性。 因此,不可能同时实现性能和稳定性的优化。 因此,需要一种控制权衡的控制策略。
图1.拟议的控制器架构
对于控制器设计,已经设计了一种特殊的测试操作,旨在考虑在性能和稳定性要求之间存在重大折衷的关键驾驶情况.所考虑的试驾由依次执行的以下四个操作组成,初始前进速度为=25km/h:
1)10 s长的全油门开度,加上正弦转向角输入,幅度为90°,频率为0.5 赫兹;
2)20 s长的全节气门开度,加上正弦转向角输入,幅度输入为20ordm;,频率为0.2 Hz;
3)10秒长的全油门开度,无转向;
4)15秒长的全节气门开度,加上正弦曲线的转向角输入,幅度输入分别为30 ordm;,60 ordm;和90 ordm;,频率为0.25 Hz。
测试的四个部分分别间隔10 s,在此过程中,节气门在1.5 s内从100%关闭到10%,以便在开始下一个加速阶段之前使车辆减速。 该测试是在低摩擦条件(micro; = 0.4)上模拟的,这是稳定性最关键的情况。 设计建议的试驾车时,就稳定性而言,第一个和第四个操纵是最关键的操纵,而第二个和第三个操纵则是更常见且危险性较小的操纵,可用于显示控制算法如何优化车辆性能 。
图2.数据处理步骤的示例:|beta;|(实线)和beta;*(虚线)
- 控制架构
总体控制架构如图1所示。可以看出,控制器由几个子系统组成,即:
bull;车辆侧滑角和侧滑率传感器,可根据可用测量结果提供估算值和(见第四节);
bull;加速度监控器,其目的是检测强大的加速操作,这是将增加的扭矩重定向到后桥以优化性能的目标条件。 它提供一个布尔变量作为输出:当时,加速度较大;
bull;稳定性主管,其目的是检测潜在的稳定性损失。 通过监视侧滑传感器提供的和的值可以识别这种情况。 它提供一个布尔变量作为输出:表示传入的稳定性损失;
bull;扭矩设定点生成,其目的是选择分动箱的适当等效刚度,以将所需的扭矩量重定向到后桥。
如图1所示,控制算法的作用如下。 在没有加速动作发生时使用的默认设置是将分动箱扭矩设置为(另请参见(2)),即为分动箱选择最低的等效刚度。相反,当发生加速时,即当时,没有检测到潜在的稳定性损失,即当时,分动箱扭矩设置为以优化性能。如果,则分动箱扭矩设置为,以避免发生危险情况。注意,如果加速操作继续并且在2 s的时间窗口内,则说明恢复的稳定性和 =。
加速度监控器在车速高于2 m / s时起作用,它计算油门踏板位置的数值导数并监控其值。 当超过预定阈值且时,将检测到加速度。
最后,稳定性监控器接收输入beta;(t),(t)作为处理输入,以获取有意义的信号以进行稳定性监控。数据处理算法提供了输出的beta;和的处理版本,分别称为和。为了计算(的理由相同),在第k个样本中,
其中(k)和(k)是输入信号beta;(t)的一阶和二阶导数的低通滤波形式,gamma;,nu;和ε是正常数,并且采样数N被选择为 如果没有其他最大值出现,则在重置数据处理输出之前-windowe经过(请参见图2)。 这种处理方法提供的主要优点是,它可以安全地处理以下情况:beta;和的振动在所考虑的操纵中很常见,并且这些信号存储的值较低,这些值并不表示车辆行为当前稳定。
图3. 调整网格的和参数空间的二维视图
- 控制器调整
控制器调整阶段负责定义最合适的和阈值,这些阈值用于将分动箱等效刚度从(用于优化性能)切换为以恢复稳定性。
在我们的方法中,这是通过临时优化过程完成的。 具体而言,通过使用第III-A节中描述的测试驱动器模拟受控系统,对在(,)参数空间中的预定义网格上选择的不同阈值,评估性能和稳定性指标。
因此,第一步是定义可能与车辆不稳定性相关的和的上限:的上限设置为5°(参见(5))。的安全级别的上限不太直观。 基于专业驾驶员的考虑和对实验结果的分析,将其设置为15°/s。
参数空间(,)中的网格是图3所示的阴影区域:可以看出,调整阶段的最终目标是找到两个参数的最佳组合,以定义标记为A的点如图3所示。这可以唯一地设置阈值以表示信号不稳定,并使控制器在分动箱等效刚度和的两个极限值之间切换,并管理性能/稳定性折衷。 考虑到这两个参数对车辆稳定性的综合影响,相对于先前定义的两个上限,网格是更保守的,这些上限是一次考虑一个单一参数设置的。
因此,优化过程将以0.5°的分辨率探索从1°到4.5°的值,以1°/ s的分辨率探索从4°/s到12°/s的值。
每个模拟测试都提供两个数值输出:相对性能指标
其中性能成本函数(请参见公式(4))相对于可能的最佳性能(即以分动箱等效刚度的最大值获得的性能)进行归一化。 相反,相对稳定性测度为
相对于可达到的最高稳定性水平,即以分动箱等效刚度的最小值获得的稳定性水平函数(参见公式(5))进行归一化。
初始阶段是在初始车速 = 25 km/h且摩擦系数micro; = 0.4的情况下模拟试驾时进行调整阶段。 第III-D节将专门讨论针对车速和摩擦系数进行灵敏度分析的结果。
在图4(a)-4(b)中以图形方式表示了所有探索的网格点的获得结果,其中示出了相对稳定性和性能指标值作为调整参数和的函数的三维视图。灰度平面表示用分动箱等效刚度k = 的固定值获得的结果,即,车辆配置与前轮驱动尽可能接近。 通过检查图4(a)可以看出,k = kmin确实提供了最高的稳定性,并且当我们向网格边界移动时,S(,)显著降低。 相反,图4(b)显示k =提供了最差的性能指标,并且由于我们允许使用较小的保守阈值来管理和之间的切换,因此P(,)显著增加。
图5给出了突出显示性能和稳定性之间折衷关系的图形表示,其中提供了相对性能与相对稳定性指数的关系图。 左下角的十字表示k =时获得的结果,它给出了最佳的稳定性和最差的性能指标。 类似地,右上角的正方形表示使用k =获得的结果,它给出了最差的稳定性和最佳性能指标。 星号表示针对kisin;(,)的不同但固定的值而获得的结果,而圆圈是使用建议的控制器获得的结果。
图4.用3D图表示相对稳定性(a)和性能(b)指标值作为调整参数和的函数
可以看出,暗灰色区域是组合(S,P)平面的一部分,可以通过无源分动箱设置来达到,而浅灰色区域是可以通过提议的主动控制器实现的部分 。 优点很明显,因为所提出的控制策略可以显着提高性能,同时仅保证仅次于最佳的稳定性水平。
图5.初始速度v0 = 25 km / h时,性能与稳定性指标的关系
基于要求优先考虑稳定性目标的工业要求,图5中的三角形是选定的最佳调整情况。
图6.初始速度= 35 km / h时的性能与稳定性指标
- 敏感性分析
由于乘用车控制系统需要在各种可能的驾驶条件方面具有鲁棒性,因此需要进一步研究在调整阶段获得的结果的鲁棒性和一致性。 在考虑的设置中,两个最重要的不确定性来源是轮胎-道路摩擦条件和车速。 具体来说,在将控制器的摩擦系数调整为micro; = 0.4(即雪道)的情况下,我们需要验证,在转向更高抓地力的道路时,闭环系统的性能不
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236785],资料为PDF文档或Word文档,PDF文档可免费转换为Word

