英语原文共 25 页,剩余内容已隐藏,支付完成后下载完整资料
基于液压能量再生减振器的液压联动悬架建模与平顺性分析
Junyi Zou, Xuexun Guo, Mohamed A.A. Abdelkareem, Lin Xu, Jie Zhang
摘要:
悬架系统是减轻路面不平度振动影响的重要组成部分,而路面不平度振动通常由减振器来消除。从能量回收的角度出发,提出了一种基于能量再生减振器(HIS-HESA)的液压互联悬架,以同时提高汽车的平顺性、操稳性和馈能性。本文主要研究了结合HIS-HESA的7自由度整车悬架模型的建模和平顺性分析。根据各液压元件的压降和流量之间的关系,建立了HIS-HESA的数学模型。基于正弦激励下的参数分析,给出了HIS-HESA的特性。此外,还比较了传统减振器和单一HESA的悬架动力学和能量回收率。在此基础上,利用HIS-HESA与传统悬架进行了车辆动力学(车身加速度、轮胎动态载荷和再生功率)的仿真比较。仿真结果表明,HIS-HESA除了可以再生能量为车辆电气设备供电外,还可以衰减振动,保持良好的乘坐舒适性。分析还表明,外部阻力对HIS-HESA的影响为HIS-HESA的半主动控制提供了可能,这将是今后研究的重点。
关键词:液压互联悬架、能量回收、液压能量再生、整车模型、乘坐舒适性
1. 介绍
1.1液压互联悬架
悬架系统作为汽车部件之一,其主要作用是衰减路面不平度引起的振动,并将力传递给车身,从而影响车辆的平顺性、操纵性、稳定性和安全性能。除了上述功能外,悬架还会影响转向特性、车身侧倾运动和操纵稳定性 [1,2]。随着交通运输业的发展,因车辆侧翻而引发的交通事故越来越多[3]。通常,具有较高重心的商用车和运动型多用途车更容易发生事故,特别是当车辆在急转向运动或其他不可控运动时更容易发生事故[4]。因此,悬架系统的作用是提供防侧倾扭矩,以保持车身姿态[5].
近年来,半主动悬架系统和主动悬架系统的发展主要集中在上述车辆动力学响应的一个或两个方面。这些悬架大多是根据需要通过调整刚度或阻尼力来实现良好的动力学性能,如磁流变悬架、气动悬架、连续阻尼控制悬架和车身控制悬架。上述先进的悬架技术主要致力于提高汽车的乘坐舒适性和操纵稳定性。与这些类型不同,液压互联悬架(HIS)通过使用四个车轮的每个四分之一的悬架总成之间的相互连接方法,对提高车辆操纵稳定性和安全性做出了积极贡献[6,7]。对于HIS,每个轮站的运动可以在其他轮站产生力[8]。HIS可以更好地控制每个悬架模式的刚度和阻尼,而不是通过单个四分之一部件的刚度和阻尼来定义悬架模式[9]。
HIS系统主要由液压缸、蓄能器、阻尼阀和液压回路组成。气缸通过液压回路互连,这取决于包含防侧倾和防俯仰能力的目标集[9,10]。当流体流入或流出蓄能器时,相对腔室压力同时发生变化,从而导致额外的力。Zhang和Smith[11,12]研究了HIS系统,包括建模、仿真、参数优化和关于HIS动态响应(乘坐舒适性和操纵性能)分析的实验研究。在参考文献的基础上,介绍了基于液压回路布置的阻抗矩阵,并对滚装式平面半车的自由振动和强迫振动进行了实验验证。随后,在广泛的参数灵敏度分析的基础上,利用仿真评估和优化有关平顺性和悬架动力学之间权衡的模型参数,以确定系统的基本参数。结果表明,半挂汽车的HIS在相应的簧载质量模式下表现出与传统悬架相似的特性,但所有车辆都显示出独特的车轮响应特性[12]。
在Cao等人[13-15]的另一项研究中,考虑了流体特性和可变阻尼阀,提出了滚动耦合悬架的数学模型,以研究车辆在带有耦合悬架下的动态响应。结果表明,在不影响垂向平顺性的前提下,耦合悬架可以显著提高横摇刚度,进一步提高横摇模态阻尼性能。Zhu等人在文献[16]中从理论上比较了7自由度(自由度)液压互联悬架和防侧倾杆系统的操纵稳定性。结果表明,车辆在越野行驶过程中,防侧倾杆削弱了车辆的道路保持能力,而液压联动悬架系统可以显著地改善车辆的道路保持能力。Ding等[17,18] 研究了双轴汽车和三轴卡车抗倾覆液压互联悬架的特性。在文献[19]中,作者研究了通过集成在双轴客车上的液压互联悬架来提高横向稳定性和侧倾稳定性。结果表明,HIS在保持乘坐舒适性的同时,可以抑制俯仰角的姿态响应。在文献[20]中,作者设计了防侧倾和主动侧倾悬架,以提高转向特性,消除制动和转弯时的俯仰现象。
1.2 HESA早期研究
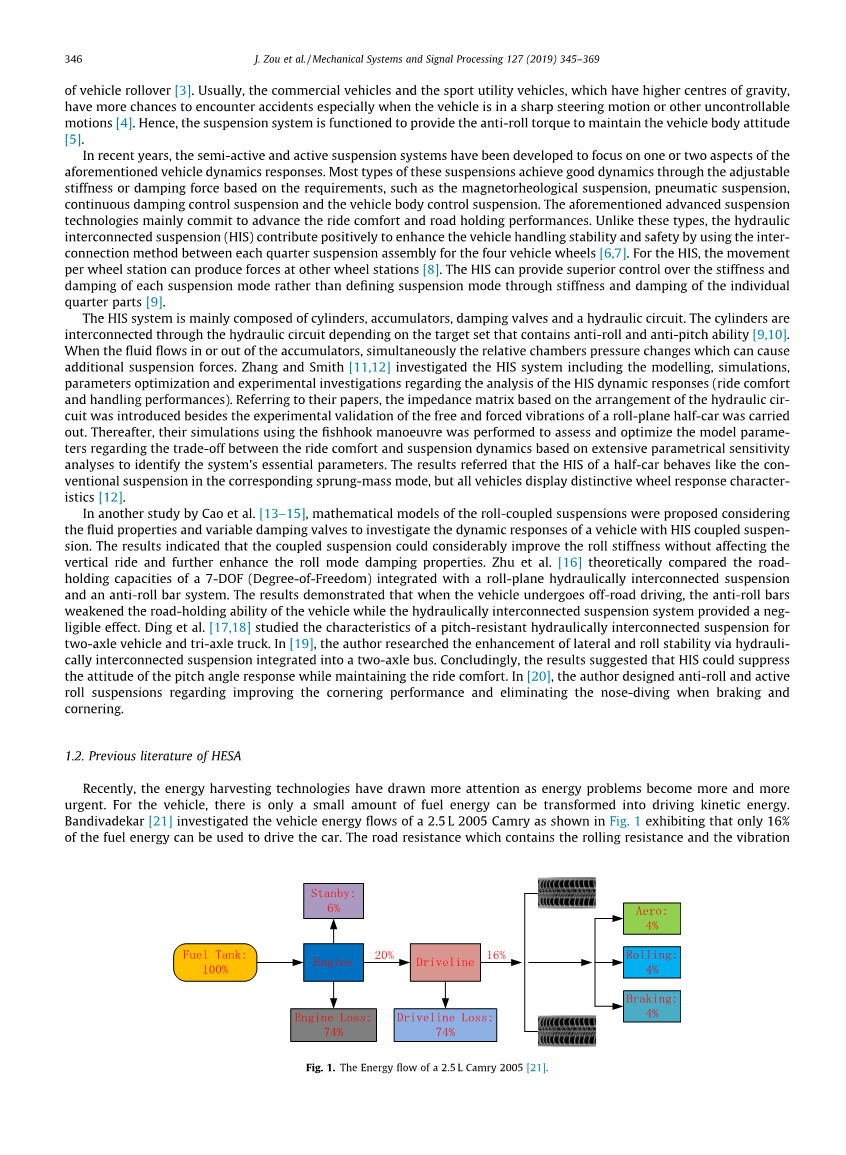
近年来,随着能源问题的日益突出,能源回收技术越来越受到人们的重视。对于汽车来说,只有少量的燃料能量可以转化为驱动动能。Bandivadekar[21]研究了图1所示的2.5 L 2005款凯美瑞汽车的能量流,结果显示只有16%的燃料能量可以用来驱动汽车。包含滚动阻力和路面不平度引起的振动阻力的道路阻力消耗了4%的驱动能量,馈能悬架可以获得汽车悬架中耗散的能量。Abdelkareem等人[22-24]评估了阻尼器件的能量收集潜力,并对潜在的能量收集和车辆动力学进行了广泛的参数敏感性和冲突分析。结果表明,考虑到标准的驾驶模式和横摇激励,可以收集到420w的潜在功率,表明超载车辆适用于能量收集系统。基于文献[25]中的实车行驶试验,作者对哈弗H8轿车右后悬架在20-50km/h的行驶速度范围内的可收获功率势进行了实验估算,结果表明,对于SUV乘用车,每个减振器项可获得140W的可收获功率。
为了提高汽车性能和能量回收能力,车辆采用了多种先进技术,如再生制动系统、热电装置和馈能式悬架等[26-28]。根据悬架系统,馈能悬架可分为机械式馈能悬架、压电式馈能悬架和液压式馈能悬架[28-30]。机械类型包括基于齿轮齿条的旋转电磁馈能悬架[31,32],基于滚珠丝杠的旋转电磁馈能悬架[33–35]和带感应发电机的线性电磁馈能悬架[36–38]。在文献[39,40]中,压电馈能悬架在车辆上的一些应用得到了发展。Zhang等人提出了一种利用臂齿机构的新型间接驱动再生减振器系统,并通过大量的参数敏感性模拟,将其能量回收能力与直接驱动馈能悬架进行了比较。此外,也有一些研究集中在基于馈能悬架的振动控制上。在文献[42]中,提出了一种基于Hinfin;控制器的半主动悬架对能量再生式座椅悬架进行振动控制,而Yan和Sun[43]采用相同的控制方法,提出了一种自供电的主动悬架。
Guo等[44-46]提出了一种新型的液电磁馈能悬架(HESA),如图2所示,它可以将悬架的线性运动转换为相对于发电机的旋转运动。近年来,对该系统进行了结构、设计、仿真和实验研究。在文献[45,47]中研究了HESA的能量再生和悬架动力学。在[48-50]中,对HESA的阻尼特性和能量再生特性进行了参数敏感性分析,表明液压马达的位移和外阻力是关键参数。
HESA的结构如图2所示,其中HESA由液压缸、液压运动整流器(HMR)、高压和低压蓄能器、液压马达和发电电路组成。HMR由四个单向阀组成,对电机的旋转运动进行校正,提高发电能力。HESA的工作原理如下:
(1)压缩行程:红色箭头表示流体流动,上腔→阀2→高压蓄能器→液压马达→低压蓄能器→阀门→下腔
(2)延伸行程:蓝色箭头表示流体流动,下腔→阀4→高压蓄能器→液压马达→低压蓄能器→阀门→上腔
在以下内容中,首先阐述了HIS-HESA的设计及其在不同工作模式下的工作原理。然后建立了HIS-HESA的整车动力学模型,包括理论基础和假设。为了研究HIS-HESA的特性,对HIS-HESA与单一HESA进行了比较分析。此外,还考虑了参数分析来解释系统参数对系统特性的影响,包括阻尼力和功率获取。最后,对采用HIS-HESA的车辆进行了平顺性分析,并与传统悬架对比了平顺性和操纵稳定性。
2.HIS-HESA的设计
HIS-HESA的设计如图3所示,有四个主减振器,其中每个车辆的四分之一包含四个止回阀作为油流整流器。此外,两个蓄能器位于A点和B点。液压马达位于蓄能器的中间,在蓄能器中,来自油缸腔室的液体经过C点流向马达进口,然后再流回四个腔室。液压马达可以驱动发电机获取能量,根据发电机的特性,将发电机的电磁转矩转化为悬架的可调阻尼力。
HIS-HESA能在不同的工作模式下有效工作,如垂向运动模式、侧倾运动模式和俯仰运动模式。这三种模式的工作原理和流体流动方向分别如图4所示。这三种HIS-HESA模式仅在液压缸与液压缸之间的流体流向有所不同。无论悬架的运动如何,液压缸中的油液从D/C点流向A点,然后通过液压马达流向B点,最后回到液压缸。
3.整车动力学模型
3.1 HIS-HESA模型
在HIS-HESA中,阻尼力是传递到车身以衰减与单向阀、蓄能器、液压马达、发电机和电路有关的振动的系统输出。HIS-HESA的数学模型包括第3.1.1节所示的流体压降和第3.1.2节所示的阻尼力。
3.1.1 压缩行程
从图3可以看出,每个减振器的总压降对应于单向阀、液压马达、蓄能器、管道和接头。
3.1.1.1止回阀。对于止回阀,假设阀孔为小孔,因此压降可以描述为:
式中,为止回阀压降,为通过止回阀的流量,为油密度。为流量系数,为止回阀的节流面积。
3.1.1.2 管道。根据达西公式,管道压降可表示为:
式中:为通过管道的流量,为运动粘度,为管道长度,为管道内径。
3.1.1.3蓄电池。考虑四种工作状态的蓄电池建模;初始状态、充油除气状态、静平衡状态和正常工作状态。蓄电池总压降为Eqs。(3)-(9)。
3.1.1.3.1、状态1:初始状态。在HIS-HESA中,两个蓄能器的压力和体积分别为P1-1、P2-1、V1-1和V2-1,它们对状态1的响应为初始状态。
3.1.1.3.2、状态2:油气预充及消气状态。将蓄能器固定在HIS-HESA系统中后,应将油泵入系统中,使气体尽可能完全排除。在这个过程中,流体流动得很快,所以可以把它当作一个绝热过程来处理。根据多变过程方程,状态数学表征如下:
其中P2_1、P2_2、V2_1、V2_2分别为状态2下两个蓄能器的压力和体积。P0为系统初始压力,r为绝热指数,根据气体多变过程的规律,r值为1.4
3.1.1.3.3、状态3:静态平衡状态。HIS-HESA将在第二次状态后固定在车辆悬架上。考虑到蓄能器内的气体弹簧和车身的重力,气体压力在静平衡过程中会产生波动。在达到平衡的过程中,流体流动非常缓慢,因此绝热指数r=1基于气体多变过程的规律。力平衡方程如下:
各向同性过程方程如下:
高压蓄能器:
低压蓄能器:
式中:m2为簧载质量,g为重力加速度,Fs2为高压蓄能器气刚度引起的弹簧力,Fsl为弹簧力,ks为弹簧刚度,d0为压缩距离,Pp为气缸上腔的压力,Pr为气缸下腔的压力。因而,Ap为活塞的截面积,Ar为活塞杆的截面积,和为状态3时高压蓄能器的瞬时压力和容积,和为状态3时低压蓄能器的瞬时压力和容积,为高压蓄能器容积变化,为低压蓄能器容积变化。
3.1.1.3.4。状态4:工作状态。当车辆行驶在道路上时,系统在路面激励下连续工作。由于蓄能器内流体在工作状态下流动非常快,根据气体多变过程的规律,绝热指数r=1。因此,各向同性过程方程如下:
高压蓄能器:
低压蓄能器:
体积的区别:
和为状态4时高压蓄能器的瞬时压力和容积,为状态4时低压蓄能器的瞬时压力和容积,Vr为活塞杆引起的容积差,Dr为活塞杆直径,s为活塞位移,v为活塞速度,Qp是从气缸流出的流量。
3.1.1.4。液压马达、发电机。对于液压马达,液压马达的压降如式(10)所示。而液压马达的转速和输出转矩与流经马达的流量和马达的排量有关,其方程如下:
其中n为转速,Qm为流经电机的流量,、分别为电机的容积效率和机械效率。q为电机的排量,Tm为电机的输出转矩。
发电机是与液压马达相连接的。根据转矩平衡,可以计算出发电机的输入转矩为:
其中Tg为发电机的转矩输入,J为发电机的转动惯量,为角速度。瞬变电磁法是由发电机反电动势产生的耦合力矩,其计算方法为:
式中kt和ke为发电机的转矩和转速常数,Eemf和I为发电机的反电动势和电路电流,Rin、Re为发电机的内阻和外阻,P为获得的功率。
基于上述方程,Pm可以总结为:
)
3.1.2。阻尼力由以上分析可知,各部件的压降随流量的变化而变化。与单台HESA相比,通过单向阀和管道的流量表达式相同,但通过液压马达的流量不同。表达式如下:
其中是每个气缸的流量输出,是通过高压蓄能器的流量,是四个车轮的悬架速度。
3.2。整车模型
为了全面研究HIS-HESA车辆的能量再生能力和平顺性,建立了一个7自由度的两轴车辆垂直动力学模型。整车模型能够综合反映汽车的平顺性和操纵稳定性。它包含一个刚性簧载质量,四个非簧载质量和四个独立悬架系统。车体具有三自由度运动,即垂直方向的直线运动和俯仰和侧倾方向的旋转运动。每个非簧载质量都有一个自由度,即垂直方向上的线性运动。基
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236461],资料为PDF文档或Word文档,PDF文档可免费转换为Word

