英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
6.2制动控制
制动系统产生的纵向力不仅仅影响纵向的动力而且会影响横向的动力。
我们建议在图2.32,纵向摩擦系数mu;x显示为一个函数的纵向滑sigma;。此外,应用程序的纵向制动力F x的变化,在给定的侧滑角alpha;和垂直力F z,侧向力F y和自调整转矩M z,如图所示2.60、2.61所示。
一个经验公式,通常用来描述这一现象,被Pacejika提议,在本章的评论轮。非对称制动力矩应用于车轮可以产生偏航时刻影响车辆路径的能力。因此刹车作动器不仅适合改变车速,而且控制它的路径和牵引能力。许多控制系统基于这种执行机构在接下来的段落,描述博世商标和缩写用于识别;这些进入共同的技术语言。
6.2.1 ABS system
ABS(防抱死制动系统)系统的目标,正如已经解释说,为了避免过度的纵向滑会减少制动能力和横向动力学控制。这个目标必须达到每一个可能的摩擦系数的值(原则上,不同轮)的公路边坡和车辆负载。同时,控制系统必须最小化任何扰动产生的突然变化的摩擦系数(如行驶在水坑,坑,井盖等)、悬架振动或制造公差或装配过程。此外,制动能力不应受到传播惯性的影响(车辆惯性驱动车轮受到的齿轮比率和参与或离合器分离)。最后,偏航力矩干扰引起的由不同的车轮上的摩擦系数(所谓的mu;-split条件),将会降低,振动在刹车踏板制动力矩造成的校准。
这个控制系统的输入参数是车轮速度,通过测量传感器在车轮中心,控制参数是时间的导数在每个制动器制动压力。事实上,ABS控制无法设置制动压力的值,但控制它的增加,减少,或维护现有的压力。虽然简单的系统是建立在过去基础上,我们将仅仅指现在普遍应用的四通道系统,该系统的特点是速度传感器和一个独立的压力控制每个轮子。
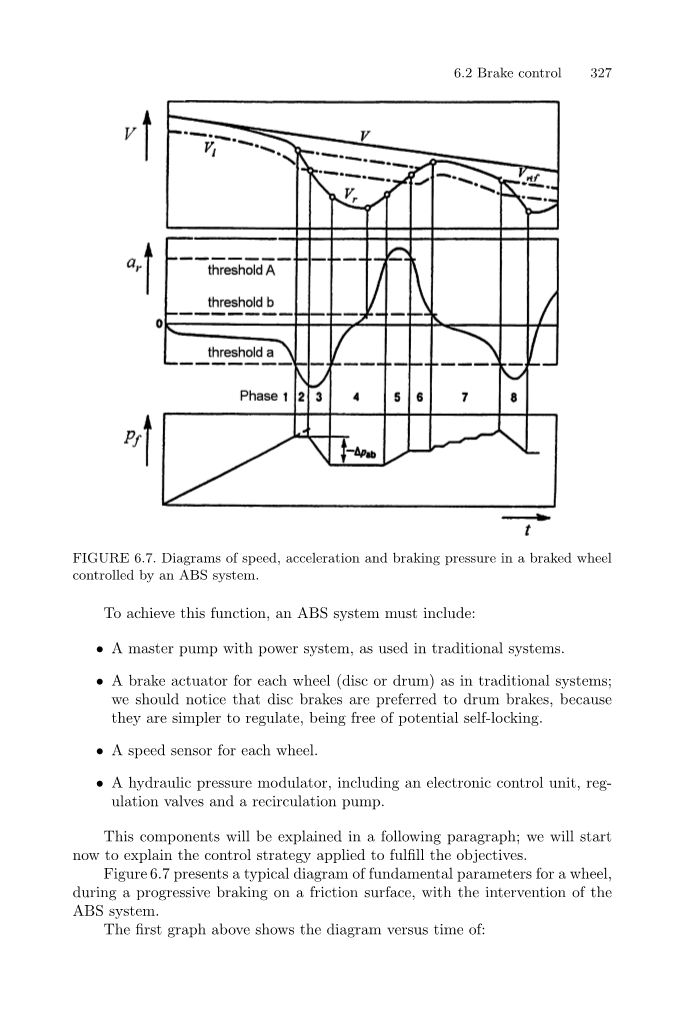
图6.7 图的速度、加速和制动轮的制动压力由ABS控制系统 326
实现这一功能,ABS系统必须包括:
- 一个·电力系统主泵,像传统系统一样。
- 每个车轮的制动执行机构(刹车盘或鼓式制动器)像传统系统一样;我们
应该注意,盘式制动器与鼓式制动器相比是首选,因为他们是简单的调节,自由的潜在自锁。
- 每个轮子的速度传感器。
- 液压调制器,包括电子控制单元,监管阀门和循环泵。
这个组件将被解释在以下段落;我们将开始现在来解释用于实现这个目标的控制策略。
图6.7展示了一个典型轮子的基本参数图,在进步的制动摩擦表面,与干预的ABS系统。
第一个图表显示的图和时间:
- 车辆速度V:这个值不是由控制系统来衡量,但是显示在图供参考。
- 参考车辆速度V rif:该参数估计的控制系统使用复杂的车轮速度的
方法。
- 轮圆周速度V r:这是车轮速度的乘积Omega;r,通过测量传感器和滚动半径
R0。
- 限制速度V l:这是车轮圆周速度的极限,在未滑动的条件下 ,保证控制
目标。
- 第二个图(中间)显示了外围的加速度轮一个r,第三图,在底部,描述了有效
的制动压力在致动器p f由电子控制单元。
电子单元计算加速度r,推导出速度V r衡量车轮传感器;特定技术应用于滤波器的信号从磁选择ups,从而抑制噪声。一些特征阈值确定加速度图它们是:
- 阈值(值lt; 0):这个值肯定是高于最大车辆可接受的减速。它显示了一个
显著的区别实际制动力矩和最大制动力矩稳定,由于过度的制动压力或突然瞬态不稳定区域。
- 阈值(值gt; 0):这个值显示了制动力矩相当低于最大稳定制动转矩;相应的
滑动一个较小的值,远低于最大值。
- 阈值b(值gt; 0):这个值为零附近突显出返回关闭最大的(F(x,sigma;)曲线。
在ABS系统的控制之下,七个阶段可以识别出一个制动的特点。
第一阶段
图对应的时间t = 0开始制动。在第一阶段没有控制系统的干预。
事实上,在这一阶段车轮速度V V l和r大于阈值外围加速度r是负的,在相同的秩序价值的车辆减速。后者的价值低于阈值,表明过渡到不稳定的领域。
327
因此,在继续制动,活塞压力增加不断,根据司机的行为和电路延迟。加速度将保持几乎不变,因为滑行继续增加摩擦力矩增大制动力矩。
在到达阈值之前,加速度将显示一个突然的变化,强调不稳定区域的边界附近。
第二阶段
只要是超过阈值,第二阶段开始,制动压力保持不变。
这只发生在阈值被超过。事实上,突然高速制动,制动力矩梯度高,在组合与轮胎特性曲线不是很陡峭的稳定的一部分,意味着摩擦力矩的缓慢增加。因此可以达到阈值在稳定状态和不必要的在这些条件来减少压力。
如果第二阶段的开始代表从稳定到不稳定的过渡区、滑动的价值已经达到最优,保持不变在制动产生良好的性能。
在这个阶段车轮减速不断减少。
这就解释了为什么制动力矩是恒定的,而增加,减少摩擦力矩(F(x -sigma;的极限曲线已经取代)。
第三阶段
以下值V l滑很高靠近轮坯;因此穿越对应的阈值轮速度V r意味着进入第三阶段,以减少压力。
随之而来的减少制动力矩使倒置的加速度图,甚至低于阈值开始增加,
当车轮速度降低,但降低的斜率。
在阶段3轮仍在不稳定区域和滑仍在增长。摩擦转矩下降速度慢于制动转矩。因为这个原因加速度开始增加。
第四阶段
只要加速度超过阈值,我们进入第四阶段,恒压的特征。在第一阶段跨越的门槛意味着进入不稳定的地区,在这种情况下穿越意味着回归稳定的地区,因为在此同时,制动力矩一直稳定在一个较低的值,对应Delta;p ab,第三图。
这一事实使得加速度继续增加,直到它是正的。因此轮速度V r将减少在这个阶段的第一部分最低,然后再次开始增加。
加速度的增长是由于这一事实,而制动转矩保持不变,摩擦力矩增加,直到它大于制动扭矩。这种增长是因为滑的减少。
在这一阶段再次减速超过阈值b。这不会发生,它将需要继续进一步减少
制动压力。这可能发生,因为第三阶段没有下降的压力足以使摩擦力矩成为高于制动转矩。
第五阶段
只要加速度超过阈值,5级开始,它是特点是一个压力增加。在这个阶段的第一部分,纵向滑动减少会导致增加摩擦力矩和顺向增长加速,直到今年增加加速度
328
的趋势变化。
第六阶段
6级开始加速超越,与负斜率阈值,压力保持不变。在这个阶段车轮速度继续
增加和减少,但由于滑又稳定的地区,摩擦力矩也减少,一起加速,直到这个超越,
总是与负斜率阈值b。
另一个策略,由博世推出,刹车前轮使用更高的摩擦延迟的压力。在这种情况下,偏航力矩只是延迟,但是司机是一个更好的机会来弥补这与不同的干扰操舵角。这种延迟应校准车辆特征为了不降低制动性能过度。
6.2.2 EBD系统
首字母缩写EBD来源于电子刹车分配器。
众所周知,在刹车,惯性力量的中心重力决定垂直荷载传递,增加的垂直载荷
前轮和后轮的减少。如果一个制动时刻只是垂直静载荷成正比被应用,后方轮将会失去他们的附着力,危及车辆路径的稳定性。为了避免这种结果,引入了一个分配器阀制动没有ABS控制电路。上一段落中描述的,这一点阀是写给限制后轮制动压力。这个函数也可以由一个ABS系统,这补充道特性称为EBD。
对于一个给定的车辆可以理想的压力分布,计算图5.12所示,曲线代表的轨迹点p ant - p飞机,保证两个轴上的最大制动力。必须修改这条曲线上的每个可能的荷载组合车辆。例如满载曲线允许后方刹车比更高空的状态,因为负载变化要影响后轮负载。EBD控制试图复制理想曲线的方式优于机械刹车分销商。为了达到这个目标,车辆质量估计相比之下的主泵压力与车辆减速;也可以使用质量的价值估计质量故障。直到刹车踏板控制动作是最小的,经销商全负荷曲线;另外后桥的包含。在更高的主泵压力,EBD控制分散使用的压力ABS阀门。注意,这种策略意味着精确计算的滑动,这取决于在车辆的速度。但这不能从车轮速度估计准确。一个控制系统保持前后车轮滑移之间的区别同样是简单和有效的。EBD控制系统所需的组件是相同的在ABS系统;只有软件的影响,因为特定的算法添加
这个函数。
我们应该记住,一个EBD系统,作为一个机械经销商,受到规定最低减速在失败的情况下,这个系统必须包含一个恢复模式包括一个安全的减少制动力量吗失败的事件。
6.2.3 VDC系统
VDC(车辆动力学控制)也通过不同的商业名字,例如ESP(电子稳定程序)或VSC(车辆的稳定性控制)。这样的系统的目标是获得一个稳定和可预测的车辆动态行为总是,避免轮胎操作对其稳定极限。的该系统的执行机构再次轮制动转
329
矩以获得应用合适的车辆偏航力矩。
VDC需要的控制组件包括:
- 主泵、真空伺服,传统的系统
- 制动执行机构,传统的系统
- 车轮速度传感器,与ABS和EBD系统共享
- 液压调制器,包括阀门和加载和再循环
- 与ABS和EBD系统泵、共享
- 方向盘的角度传感器
- 偏航速度和横向加速度传感器
- 线的连接发动机电子控制单元。:
方向盘角,偏航速度和横向加速度传感器用于识别的主要描述车辆横向动力学参数。电动泵和阀门用于这个系统产生压力脉冲为单一的刹车,独立于司机的
意愿。当车辆在曲线和转弯的轮胎小于需要本地的平衡离心力,车辆偏离了之前的路径。如果这个缺陷是本地化的前轴,这种现象是相似的对转向不足1和车辆描述路径曲率比在较小正常情况下,如果它是本地化的后桥,这种现象是相似的过度转向,车辆高曲率比描述了一个路径正常情况下。直流控制系统试图恢复初始路径,纠正偏航力矩与轮胎的限制。
要做到这一点,电子控制单元计算预期的偏航速度转向角和车辆的机动速度。如果有差异测量偏航速度,四个制动力矩计算是很有用的纠正这种情况,或者至少减少车辆速度,如果摩擦限制超越。减少发动机扭矩也有助于这个减速;这一点之间的通信信道的目的是发动机控制和直流控制系统。发动机扭矩在降低点火提前减少,减少注入燃料或减少节流阀引擎由电线。这些干预措施不能诱导,轮胎陷入侧滑或纵向滑不稳定。两个控制回路是必要的。计算所需的制动力量之一稳定;一个内层的循环控制车轮滑动,以获得所需的纵向和横向力。必须适合数学模型预测车辆运动的负载变化,在不同车辆荷载、道路和轮胎的摩擦磨损。
6.2.4 ASR系统
这个缩写词来源于Anti-spin监管机构。关键的驾驶情况下不刹车的专有或曲线。加速度和牵引的力量也可能导致车辆不稳定。ASR系统纠正这些情况,避免过度的驱动车轮。这个结果是通过暂时减少扭矩应用实现的由发动机驱动车轮或应用的制动力矩控制系统能自动产生扭矩。ASR,如前所述,是一个额外的
ABS系统的函数,这意味着沟通与发动机电子控制单元。ASR控制单元集成与ABS控制和股票它的组件,如车轮速度传感器和压力控制阀门。
6.2.5 BAS系统
330
BAS系统(刹车辅助系统)应用的任务一个常数制动压力,独立的司机,为了减
少停车距离尽可能在紧急情况下。这种控制系统是有用的在恐慌由非专业司机刹车;此外专家司机不适合ABS系统可能本能地减少制动踏板力,控制系统将试图避免滑倒在任何情况下避免。受损的司机,踏板力可能不足利用完整的制动能力。
6.2.6制动控制硬件组件
所有的制动控制系统应用下面的传感器和执行器。传感器车轮速度传感器与磁皮卡齿的轮子。图6.8中的齿轮射频矩形剖面由铁磁材料,面对磁传感器;磁轮旋转变化通量被皮卡。
图6.8 车轮速度传感器的安装方案;射频是齿轮。磁传感器的放大显示细节;在右边两所示图生成的低速电压(虚线)和高速(固体线)。
皮卡是由磁芯1和软铁芯2。磁字段由磁芯由配置文件定期改变运动轮及其价值是衡量线圈3,这将提供一个电压周期和振幅是由转速决定的。在右上角的图定性为所示的电压时间的函数,低转速(虚线)和高革命速度(实线)。这个信号是由电子电路放大和的平方;峰值计数提供所请求的速度值。在当前车轮速度传感器,电子放大器和信号调整器集成到磁传感器,可以直接与界面上的吗控制微处理器。偏航速度传感器(陀螺测试仪)和加速度传感器(加速度计)通常是集成到一个单一的单位,包括固态电子吗电路。加速度计的工作原理很简单,在于测量小结构的变形受到车辆惯性力量。这测量可以通过压电,弹性变形转换为电压变化。
偏航速度也转换为一个加速度,它由科里奥利测量加速度的尖头叉子和谐,带来的受迫振动外部的意思。方向盘角测量的电位计在转向柱上或者通过一个光
331
学编码器。要求精度在十分之一的范围学位。编码器仍然是由齿轮,周期性地打断光束接收光敏二极管;电压脉冲测量和计算由电子电路。先进的这些信号,转换为数字单位可以网络的可用车辆,这使它们可用制动控制单元和其他服务,例如,个电力转向系统。
图6.9说明了电子液压调制器的功能方案制动控制系统。两个独立的液压回路可以确认,在这种情况下,根据所需的X计划,以满足规定应急电路。六electrovalves常开(三. . ENO6)存在于电路和六个electrovalves常闭(ENC1 . . ENC6)。常开意味着液压回
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147629],资料为PDF文档或Word文档,PDF文档可免费转换为Word

