英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
IEEE智能交通系统,2010,11(4)。
由手动控制的分动器而设计的分时四驱驱动汽车
朱利奥Panzani,利玛窦Corno,玛拉Tanelli,会员,IEEE,安娜丽莎Zappavigna,塞尔吉奥·M. Savaresi,会员,IEEE,安德烈Fortina和塞巴斯坎普。
摘要:装有扭矩偏压装置如活性差异和活性转印情况下,新的传动系结构已经取得了新一代的点播四轮驱动车辆,其中,左和右之间以及前后轴之间的扭矩分配可积极地在线调制。这允许人们设计,其能够改变的活性的车辆控制系统,通过电子控制,由它的机械布局,例如,转向不足和转向过度特性决定的汽车中的行为。本文提出,同时保证通过积极控制转让的情况下车辆的稳定性和驾驶性能,优化了车辆性能控制策略。整体控制策略的性能评估在两个多体模拟器和仪表测试车辆。
关键词:四轮驱动(4wd),分动器,车辆控制,车辆动态。
一、引言和动机
在四轮汽车,电子稳定控制系统(ESC)在最近的过去,以提高乘客在危急的驾驶条件下的安全被引入,它现在是最商用车的一部分[1]。到活性底盘稳定性控制几个解决方案,已经提出在科学文献中,其共同的目的是通过产生适当的偏航力矩时危险机动发生恢复车辆稳定性积极修改车辆动力学,例如,[2] - [4]。
通过一个电子控制系统,改变汽车的行为的能力,这一点,在原则上,从它的机械布局决定的,已开通的道路上的所谓的全球底盘控制,其中,可用的致动器如的组合管理制动器,转向,和牵引用于控制车辆的全局行为,例如,[5] - [9]和其中的参考文献。
在一个更广阔的视野,我们认为全球底盘控制研究领域为未来的智能汽车,在驾驶者的喜好和倾向将通过适当的控制系统进行检测,并映射到具体的控制系统的设置,使车辆的动态第一启动密码行为最靠近驾驶员的偏好。当然,必须同时始终保证和加强主动安全进行在线等个性化车辆。
在用于车辆的稳定性和处理的偏航控制系统的领域,大多数可用的解决方案是基于制动器,例如,[10]。这些方法尝试通过强加-具有差分提升曲线中两个车辆的性能和稳定性的制动和转向不足VS过度转向行为到车辆。基于制动系统,然而,已显示出特别是在强加速机动[11]恶化车辆的纵向性能。
基于制动器的解决方案的替代方案是由在车辆传动系中使用的新一代扭矩偏置装置,它可以被控制,以积极地分发前后轴之间的驱动转矩,以提高稳定性和性能提供。从前面到后轴点播扭矩重定向可以通过任一电子控制式差速器或电子控制的中央传送例来实现[12],[13]。这些扭矩偏置器件允许人们通过积极改变车辆配置,使之更接近一个完整的前轮驱动追求安全目标或四轮驱动,设计了一种随需应变的四轮驱动(4WD)车辆经由一个更平衡的扭矩分配到四个车轮以优化性能。
在本文中,用于组合的性能和处理优化的控制策略是基于中央转移的情况下,它允许一个调制重定向到后轴扭矩量的主动控制建议。
从控制设计观点来看,一个控制系统,其目的是优化车辆性能,同时保证稳定性和驾驶性能提高几个问题。首先,处理从一个真正反馈角度考虑问题,需要两个选择最佳控制变量并产生一个适当的基准信号。第二,与经典工具接近所述控制器的设计,需要一个有意义-但易于处理的动态车辆模型。作为对控制变量的选择,有关车辆稳定性的最有意义的是车辆侧滑角,I.S.,车辆纵轴和质量速度矢量的车辆中心的方向之间的角度。但是,车辆侧滑角的估计是相当困难,以获得在所有驾驶条件和采用它作为一个控制变量[14]所需的精度[16]。此外,合适的参考轨迹的选择不是一个简单的任务,因为它能够车速灵敏度以及最重要的是对道路摩擦条件[17]。在车辆上的建模侧,驱动条件下所考虑的控制器必须活性是非常复杂的,结合强加速度和弯道上低把手的道路。这样,线性化模型似乎不表现足以被使用,而一个完整的非线性车辆模型太复杂,用于控制设计的目的。
因此,本文通过提出一个监控架构解决以一种创新的方式考虑问题,通过驾驶员辅助系统,主动的设计框架的启发。即,该控制器通过最大化,同时保证车辆的操纵稳定性,通过限制所述车辆侧滑角的最大值传送到地面的牵引转矩的量来优化车辆性能。这个目标是通过,要么打开或关闭传送的情况下,从而选择要重定向到后轴扭矩的量的切换策略来实现。控制器整定相是在基于模拟的方法,其中该多体非线性模拟CarSim用作车辆模型经由适当的成本函数优化执行。
在科学文献中,一直很少,现在通过扭矩偏置器件出版到主动车辆控制。在[12],提出了分层控制架构,其中一个上的控制器,通过经典ESC构成,确定期望的横摆力矩,和下部控制器尝试利用扭矩偏压(通过两个电子控制差速器和活性传递来实现它的情况)。对于[12],本文提出了一种基于只有主动分动箱的方法,提供引导控制器调节定量相结合的稳定性和性能优化。
此外,该方法包括整个控制器架构,还要考虑相关的评估和实施问题。具体来说,我们解决推定两者的侧滑角和从上配备ESC系统,即,纵向和横向加速度和横摆率传感器的车辆用标准传感器侧滑率的问题。作为估计必须具有鲁棒性性能相对于传感器的非理想特性,我们提出了传感器偏压的在线补偿不需要额外的传感器的方法。然后将无偏信号被用于供给在[16]引入了侧滑角观察者,从而确保期望的性能。作为事实上,在[16],观察者性能仅在模拟数据进行测试,和作为这样-需要一个偏移补偿算法并未出现。此外,我们还提出了一个侧滑率观察,从而避免了从侧滑角估计的数值微分中获得这样的变量。
本文安排如下。第二部分介绍了车辆结构,而在第三部分的仿真环境和实验装置进行说明。第四节是专门讨论所提出的控制方法的各个阶段。第五部分提出了有关这两种车辆侧滑速度,侧滑角,这是需要一个网上实现该控制器的估计问题。整个控制结构的实验结果在第六节呈现。
二、系统架构
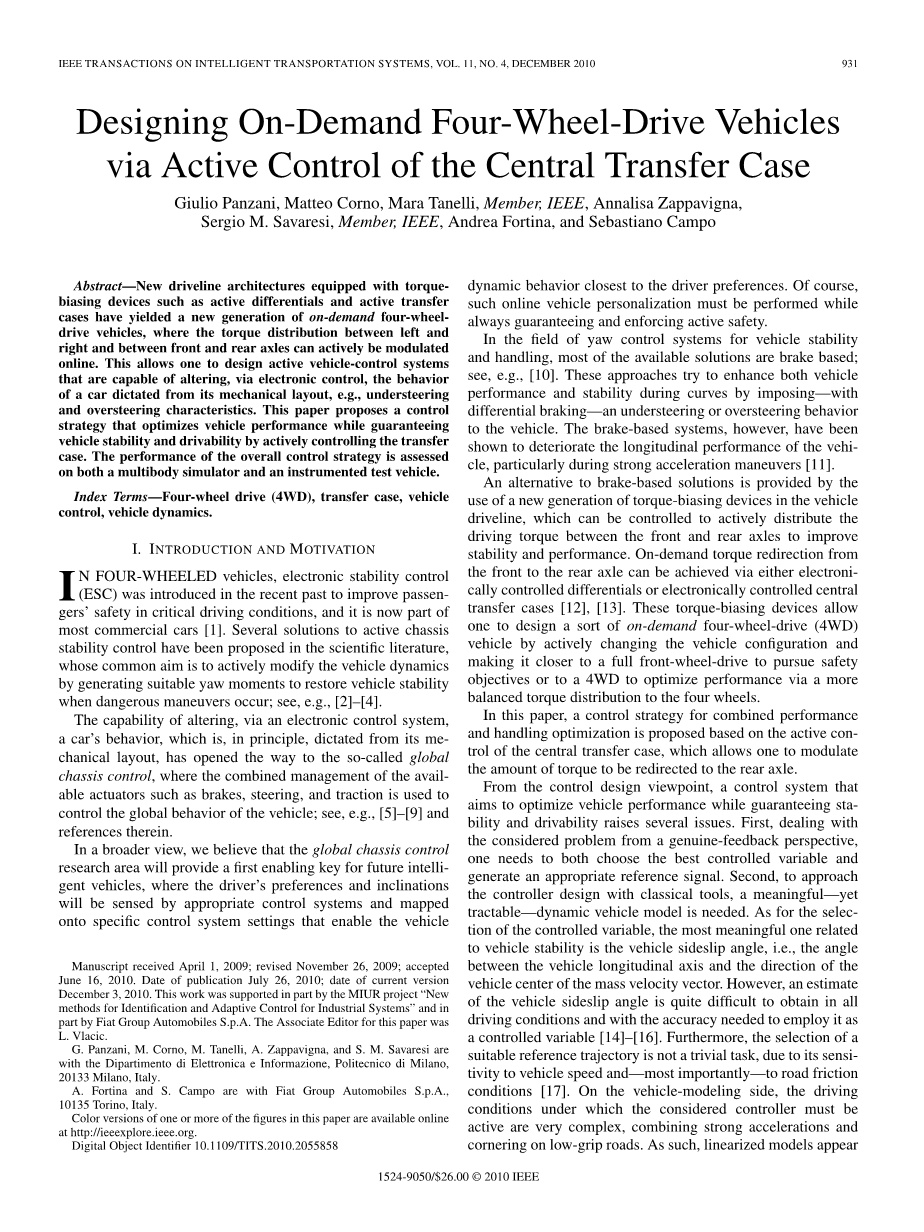
所考虑的车辆是一种按需4WD车,其中,发动机扭矩可以通过一个电子控制的转移的情况下被重定向到后轴(参照图1)。在分动箱的总扭矩不适用是
其中,腾(t)为发动机转矩,eta;gear是变速箱效率,tau;gear是变速箱增益。请求到中央传输情况下的转矩正比于在前后轴速度差Delta;omega;fr(T)=omega;F(s) - omega;R(t)的,即
其中,k的模型转印的情况下等效刚度,以及前后轴角速度被计算为
用omega;ij(t),I ={F,R},且j ={L,R}作为四个车轮角速度和tau;FD和tau;RD分别为前部和后部差动比率。需要注意的是,通过选择前部和后部差动比率不同的值[参见(3)],可以实现在转印时的预压的效果,作为前和后轴速度也被迫以恒定的速度和上直到不同直插式驾驶。
通过调节在转印壳体油压回路的阀开度,可以积极地修改等效传递壳体刚度k值为[见(2)],这在本文中被认为可以最小Kmin和最大值Kmax之间切换的情况。为了说明的阀开闭动力学,具有70毫秒的建立时间的低通滤波器被使用。
在下文中,等效传送壳体刚度k,便会被视为控制变量。这是由以下事实的当前转让的情况下技术使我们能够通过打开或关闭相应的阀仅命令传输情况下的等效刚度的这两个极端值中的一个激励。更复杂的转移的情况下的扭矩的一个完整的调制是可能目前正在考虑。
总之,在所考虑的动力传动系统结构,定向到后轴扭矩Tr(t)由给定
因此,在前轴Tf (t) 的扭矩可用的形式
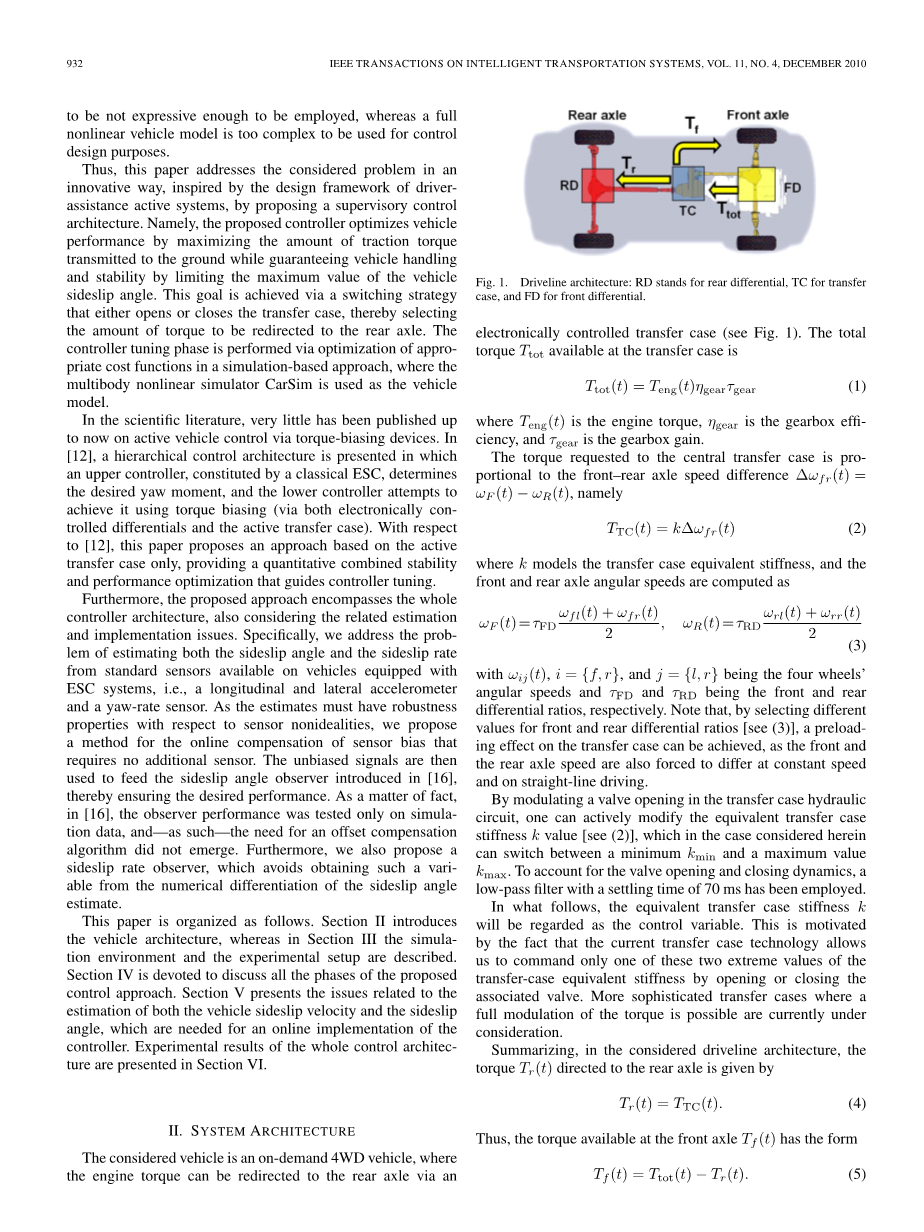
图2.对测量数据的多体仿真验证结果。 (上图)发动机扭矩。(底)偏航率在全油门加速转弯时。垂直虚线表示全油门开口的开始。
三、模拟环境实验装置
如今已经提到的,该控制器的设计将基于使用的优化过程中,作为车辆模型,一个完整的汽车非线性多体仿真(在MSC CarSim小型车/ SUV车型,调谐到适合目标车辆,这是一个中等规模的交叉)。该仿真模型整车,轮胎和发动机动力。这样,通过该模拟环境的装置获得的结果,可以认为非常接近于实车试验。
为了验证模拟器和目标车辆之间的配合,一些实验测试已经进行了。考虑的是机动转弯时开始全油门加速。 图2显示了对测量数据的多体仿真的验证结果(轴尺度出于保密原因省略),比较测量和模拟发动机扭矩(上图)和偏航率(下图)的值。图2的垂直虚线表示全节气门开度的开始。验证结果被认为足够令人满意把仿真模型为控制设计目的的适当基础。
最后,值得一提的是,在对实际车辆的最终实施,以下变量将可用于测量:四轮转速omega;ij(叔)中,i={F,R},J ={L,R};纵向加速度AX(T);在(t)的横向加速度;横摆率˙psi;(t)的;和油门踏板位置皮克(t)的。
四、控制器设计
本节说明整个控制设计过程。首先,通过稳定性和性能指标的引入,与所选择的测试驱动器一起。此外,控制器的结构的详细,与调谐相激励和讨论。最后,进行灵敏度分析,它是专为调查相对于车速和轮胎道路摩擦条件控制器的鲁棒性。
- 稳定性和性能指标
如所提出的控制系统的总体目标是优化管理折衷在临界机动性能和稳定性之间,适当的成本函数需要被定义,以提供这样的性质的定量描述。具体地说,我们认为车辆性能为当强加速度被叠加到一个转弯状态,可能在低把手路传送到地面的纵向和横向力的最大可能量的能力。这样,自然成本函数来测量性能是
其中,FXI(t)和拟合分别是第i个车轮的纵向力和横向力。需要注意的是,只要车辆动态行为而言,最大限度地提高JP隐含装置以避免达到纵向和横向车轮打滑的大的值,从而提高正确以下由转向命令所施加的所希望的轨迹的车辆能力。
车辆稳定性的概念,在另一方面,是涉及安全性和驾驶性能的驾驶感觉。动态变量,对于稳定性最佳的帐户是车辆侧滑角beta;(t)的。beta;(t)的较大值并不一定意味着车辆动力学不稳定;然而,随着beta;(t)的增加,非职业驾驶员中逐渐丧失安全地管理当前机动的能力。根据职业司机的看来,可以理解的是对beta;(t)的值的合理的阈值,以保证驾驶性能在安全的条件下是5◦(也见[4])。作为这样的成本函数的JS量化稳定性水平被定义为
该条款表示,沿整个机动车辆侧滑值超过5◦安全水平。需要注意的是,相对于现有的文献(例如,见[4]),其中硬约束逐点beta;(T)lt;5◦,forall;T,在控制器的设计结合,我们已经决定制定一个整体的成本函数为稳定。这一点,在我们看来,更好地反映了驾驶性能和操控性是驱动程序相关的感情,应该由此以连续的方式加以量化。
值得指出的是,分动箱的等效刚度ķ作用在两个性能指标如下:A高刚度值使得车辆更接近4WD之一,由此在损害稳定性为代价的优化性能。相反,随着刚度值减小,车辆行为移向前轮驱动的,从而提供低握持表面,但改善的稳定性降低牵引能力。因此,不可能实现在同一时间的性能和稳定性优化;因此,需要用于管理折衷的控制策略。对于控制器的设计,具体的测试演习已设计,量身定做考虑危险的行驶情况下的性能和稳定性要求之间的权衡显著存在。所考虑的试驾是由以下四个演习的顺序进行,与V0= 25公里/小时的初始前进速度:
1)一个10秒长的全油门开口加上振幅的正弦转向角输入90◦和0.5 Hz的频率;
2)20秒长全油门开口加上振幅的正弦转向角输入20◦和0.2 Hz的频率;
3)没有转向一个10秒长的全油门开度;
4)15秒长长全油门开口加上不同幅度的正弦转向角输入即30◦,60◦和90◦和0.25赫兹的一个频率。
全节气门开度的阶段(从10%至0.5秒100%)与转向角变化同步地开始。四个部分的测试驱动器的由每个10秒分离,并且在这个时间间隔内,所述节流阀是由100%关闭,以10%的在1.5秒开始下一加速阶段之前向车辆到可接受的速度值减速。
而且,测试信息是模拟具有低摩擦系数(mu;= 0.4),这是最关键的情况,只要稳定性而言在道路上。注意,所提出的测试驱动器被设计成使得第一和第四操纵是最关键的那些,只要稳定性而言,而第二和第三比较常见和危险性较小演习是有用以显示如何控制算法行为以优化车辆性能。
B.控制架构
总体控制架构如图3如可以看到的,控制器是由几个子系统组成,即:
1)车辆侧滑角和侧滑率观测,提供作为输出的估计beta;和beta;从可用测量(见第六节);
2)的加速度的主管,其目的是检测强加速度机动,这对于重定向扭矩的量增加至后轴来优化性能(其提供作为输出布尔变量BACC目标条件:当BACC=1,一个强劲的加速动作正在发生);
3)稳定的主管,其目的是检测稳定性的潜在损失(这种情况下是通过监测beta;的值确定和beta;由侧滑观察者提供,它提供作为输出一个布尔变量的fstab:fstab中= 0表示稳定的呼入损失);
4)一个扭矩设定点产生,其目的是选择传送壳体的适当等效刚度扭矩所需量重定向到后轴。转印壳体主动控制算法如图3,负责确定该扭矩设定点TTC(t)的可被描述为
具体地,默认设置(当没有加速度机动发生被使用)是设置在值TTC薄荷动箱转矩)也见(2),即,在选择的最低等效刚度为转移情况。相反地,当加速时,即,BACC= 1,稳定的无潜在损失被检测到,即,bstab= 1时,分动箱的转矩被设定在其最大的值TTCmax以优化性能。的稳定性丢失(即,bstab= 0),分动箱的转矩被设定为TTCmin(t)的,以避免危险情况。
图3.驱动控制器架构
现在,我们简要介绍了加速性和稳定性监视的理由。在侧滑设计的观察员讨论推迟到第五部分。
为了确定BACC的值,所述加速度监计算油门踏板位置PG(t)和监视其值的数值衍生物; BACC=
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[152435],资料为PDF文档或Word文档,PDF文档可免费转换为Word

