英语原文共 36 页
汽车动力传动系统设计、建模即控制
第二章 离合器液位设计——汽车传动球囊系统的建模、分析与优化设计
本章研究了开环离合器运行的初始条件控制。为了获得精确的开环驱动,关键是离合器充填过程的初始条件不随循环而改变。结果表明,初始条件的一致性取决于一种称为球囊系统的小型阀门系统。在接下来的建模中,将详细介绍这种微型阀门系统的动力学分析和优化设计。
2.1引言
为了减少汽车燃料消耗和尾气排放,汽车制造商一直在开发动力系统的新技术。在传动领域,六速以上自动变速箱(AT)、无级变速变速箱(CVT)、双离合器变速箱(DCT)、自动手动变速箱(AMT)、电动变速变速箱(EVT)等新兴技术[1,2]已经出现在市场上。任何一种汽车变速箱的基本功能都是平稳有效地将发动机扭矩传递给车辆,使其达到所要求的传动比。变速箱换挡常用的传动装置是电液传动离合器。在自动变速箱和混合变速箱中,最常见的配置是使用带有液压驱动活塞的湿离合器。这主要是由于电动液压系统的功率密度高。
近年来随着六种或六种以上速度自动变速箱的引入,离合器对离合器换档控制技术[3-6]再次吸引了大量的研究和开发努力。这种离合器移位控制技术是紧凑,轻,低成本的自动变速器设计的关键。该技术采用压力控制阀控制离合器的啮合和脱啮合过程。离合器换档控制的一个关键问题是离合器的进、出同步,这与离合器的进气时间密切相关。
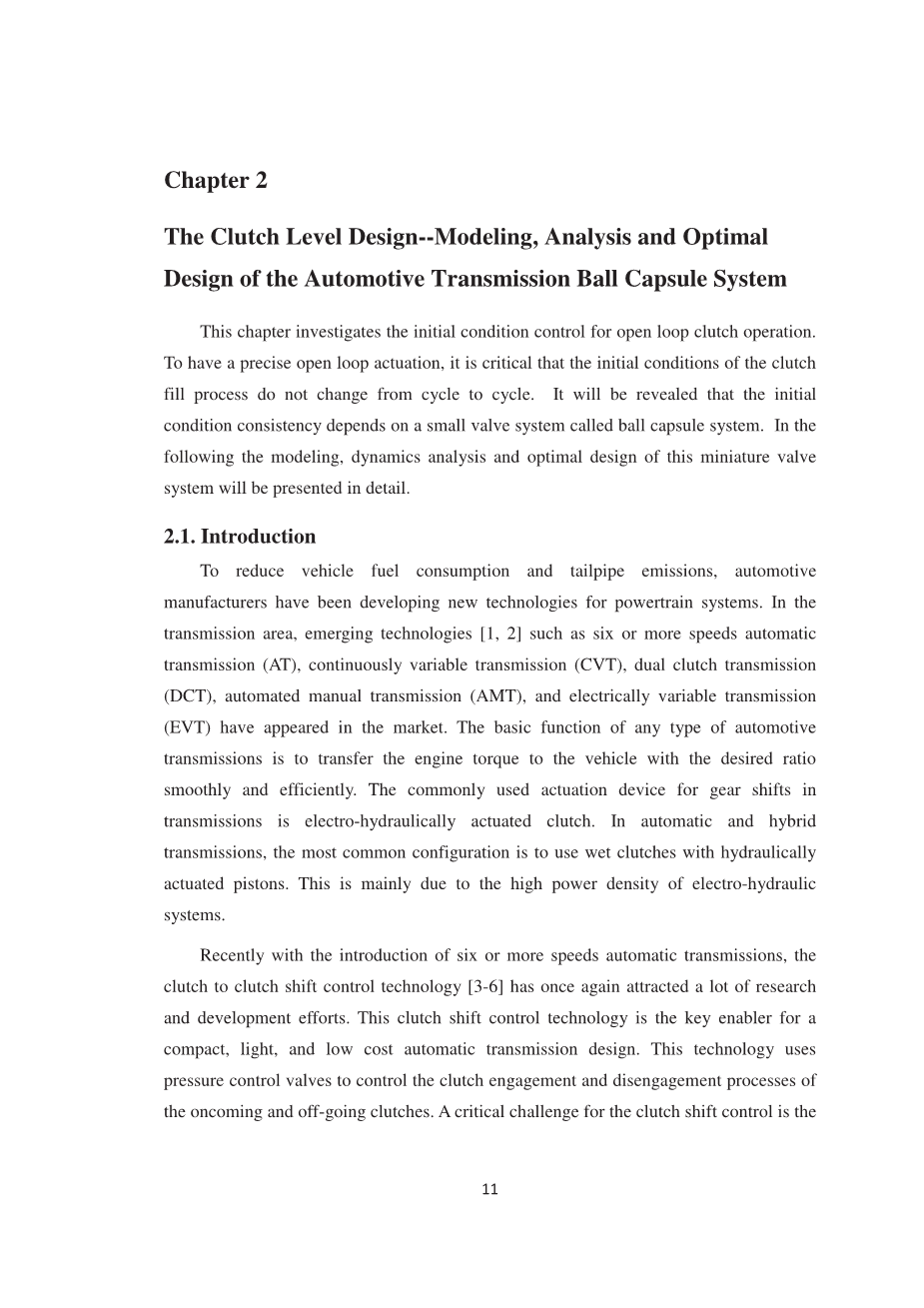
传动离合器系统原理图如图2.1所示。为了与离合器接合,高压流体流入离合器腔内,将活塞推向离合器组,直到它们接触。这个过程叫做离合器充填。在离合器充装过程结束时,离合器组已准备好被接合以将发动机托架转移到车辆传动系。由于离合器腔内缺少压力传感器,无法形成压力反馈控制回路,是实现精确离合器充液时间的难点。因此,有必要以开环方式控制离合器的充气,这在很大程度上取决于离合器系统的初始条件。因此,为了精确控制离合器充填过程,关键是离合器充填过程的初始条件不随循环而改变。但是,当整个离合器系统围绕中心轴旋转时(图2.1),离心力会在离合器腔的顶部保持一定的流体。剩余流体的旋转所产生的流体压力会对活塞产生推力,从而影响下一个循环离合器充注过程的初始条件。为了消除剩余流体,释放离心力诱导的压力,引入球囊系统,安装在离合器腔上,如图2.1所示。
图2.1 汽车传动离合器和球壳系统
球囊系统由球和球囊组成。与整个离合器系统一起,胶囊围绕中心轴旋转(图2.1)。作用在球上的离心力使球与胶囊顶面接触,使球在打开位置和关闭位置之间沿胶囊内壁旋转。球囊系统的开启和关闭是由离合器腔内的流体压力和离心力控制的。当腔内流体压力低于某一特定水平时,作用在球接触点上的力矩之和将推动球沿胶囊内壁从封闭位置旋转到开放位置。然后,离合器腔内的流体可以通过球体和胶囊内壁之间的开口区域流到排气口。另一方面,当腔内流体压力足够大时,球将旋转到关闭位置,密封排气口。
球壳系统的性能对离合器的啮合和分离过程至关重要。如图2.1所示,当离合器脱离时,弹簧力将活塞推向左侧,离合器腔内的流体通过进口孔消散。此时,离合器腔内的压力下降,球囊需要打开,使腔顶离心力所持的流体流出到排气口。当离合器充液过程开始时,加压流体通过进气口进入离合器腔。当这种情况发生时,球需要迅速关闭,以建立离合器腔内的压力。除了这些要求,系统还需要是健壮的,能够避免不希望的球在打开和关闭的位置之间的抖动。本章将对球囊系统的动力学进行建模,并对系统的稳定性进行分析,以提供达到预期性能的最优胶囊设计。
本研究的目标之一是实现球囊系统在离合器啮合和分离过程中的快速响应。由于离合器充注过程通常只需要几分之一秒的[2],球囊系统的响应必须足够快,以允许离合器腔内的压力积累。为了了解和表征如此短时间内的球动力学及其对离合器腔压力的影响,建立了球囊系统的动力学模型。建立动力学模型的主要挑战是推导流体节流面积,即球体与胶囊内壁之间的开口面积。在动态模型的基础上,建立了系统固有的正反馈结构。这实际上是可取的,因为球囊系统的不稳定特性导致了球转速的指数增长,这确保了快速响应。
球囊设计的另一个目的是防止球关闭排气时的高速冲击,否则会造成噪音和磨损。此外,球囊系统必须坚固,换句话说,一旦排气关闭,它应该保持关闭,直到离合器脱离。如果腔内存在压力变化,球囊不应打开,球不能在开启和关闭位置之间振动,否则会对离合器的充填过程产生不利影响。通过对系统动力学的分析,发现合理的胶囊内壁轮廓设计可以达到预期的性能。为此,提出了一种基于动态规划方法的变倾角球囊系统的鲁棒设计方法。
本章的其余部分组织如下。第2.2节给出了系统的动态模型。第2.3节分析了球囊系统固有的正反馈结构。第2.4节给出了系统的离散模型,将球囊设计问题作为优化问题进行求解。为此,采用动态规划方法对球囊内壁进行了重新设计。第2.5节给出了案例研究和仿真结果。
2.2 系统建模
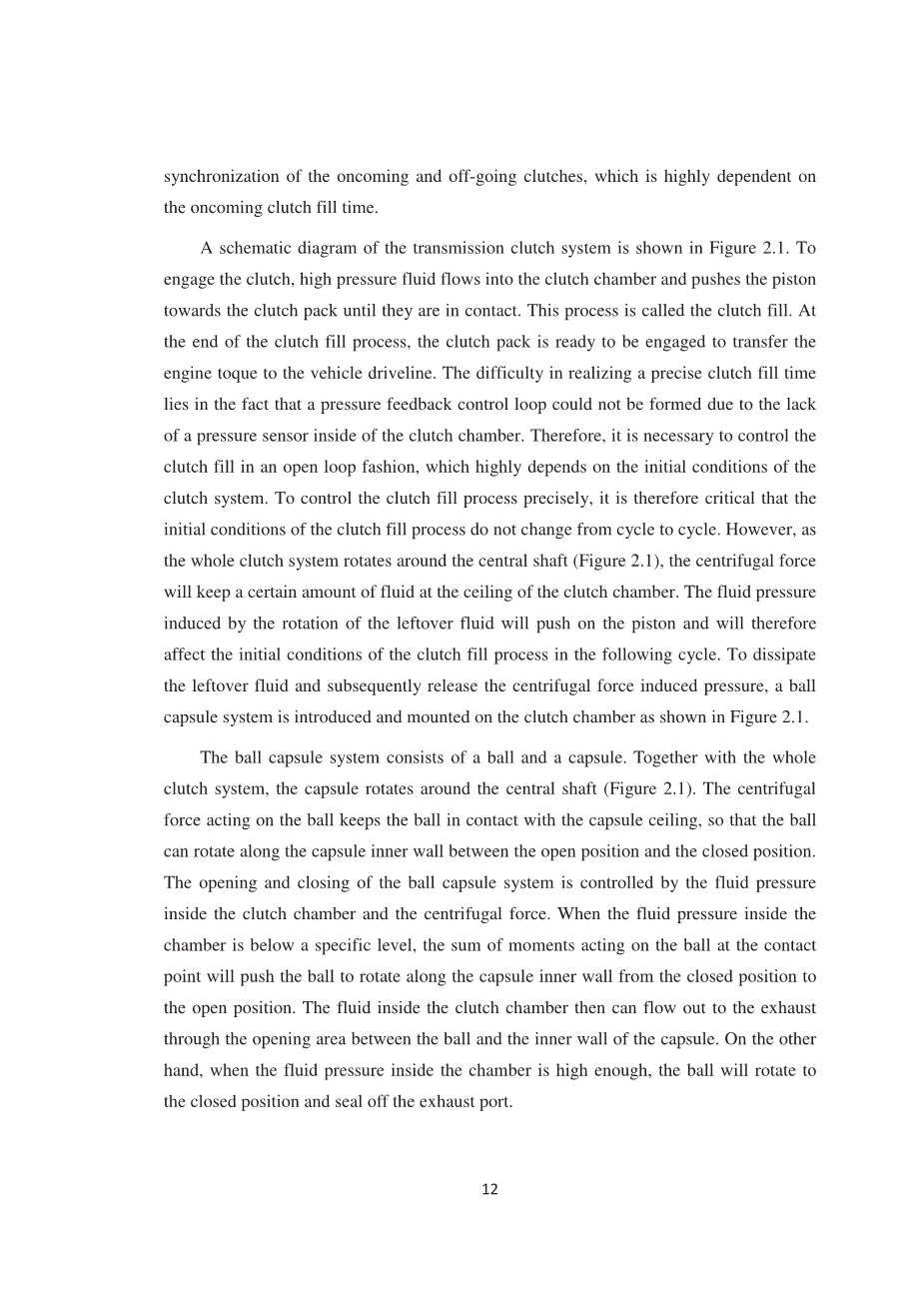
图2.2球囊系统示意图。胶囊与离合器系统一起围绕中心轴旋转(见图2.1)。由旋转运动引起的作用在球Fc上的离心力使球与胶囊顶棚保持接触。由于离心力通常比球的重量大得多,下面的建模将基于球在胶囊壁上“滚动”而不滑动的假设。离合器充液开始时,泵内压力为PS的传动液通过一个孔主动脉进入离合器腔内。P1是V1腔内位于口主动脉和Ath节流区之间的流体压力。Ath是球与胶囊内壁之间最小的开口面积,随球的运动而变化。P2为节流区Ath与排气口Aex之间的室V2内的流体压力。如果足够大,P1和P2之间的压差将克服离心力Fc所产生的扭矩,推动球体沿胶囊内壁旋转至关闭位置排气口。Pc为腔体旋转引起的流体离心压力,假设排气口外的流体压力为常压,即Patm。
图2.2球囊系统原理图
2.2.1 动力学模型
球囊系统模型可表示为:
(2.1)
即:
(2.2)
(2.3)
(2.4)
(2.5)
(2.6)
(2.7)
(2.8)
(2.9)
为球的旋转角度,v为球的旋转速度,rb为球的半径,为胶囊壁的角度。q1、q2、q3为对应孔处的流量。为离合器系统转速,rc为球中心到变速箱传动轴的距离(如图2.3所示),rcp为接触点C到胶囊轴的距离,rcap为胶囊半径,如图2.2所示。Eq(2.5)中的Aeff是由于P1和P2的压力作用在球上的力起作用的面积。这是因为,球上V1和V2之间的边线被假设为垂直线,它位于球的半径垂直于被膜斜面的点上。因此,在图2.2中,P1和PC的和作用于球的阴影面两侧,从而抵消了作用于球的阴影面两侧的力。因此,剩下的区域,称为Aeff,是P1和P2相互作用的有效区域。Eq(2.6)是由于离合器系统的旋转作用在球上的离心力。情商第二方程(2.1)是净力矩作用在球与球的接触点胶囊坡道,表示为点c .情商第三方程(2.1)对应的瞬态压力动态体积P1 V1,由于流量,q1通过Aorf Eq(2.2)所示和流量,q2通过Ath Eq(2.3)所示。同理,式(2.1)中的第四个方程为P2在体积V2中的瞬态压力动力学。式(2.8)(2.9)为计算节流面积Ath的公式,推导过程将在下一节中给出。
假设在初始条件t下,球位于胶囊内表面的上角(图2.3),此时rc的值为rc-initial。通过三角法,rc可以表示为:
(2-10)
图2.3球囊系统原理图
离心流体压力Pc,如图2.4所示,由于离心力为rc的函数,可以表示为:
其中rst为流体的起始液面。考虑到胶囊系统相对于传动系统的尺寸较小,可以假设Pc为常数。
图2.4 液体离心压力
2.2.2节流面积的推导
流体系统建模中的节流区域大多是对称的[7]。然而,在球囊系统中,由于球与球囊内表面不同心,球与球囊内表面的节流面积Ath的推导并不直接。如图2.5(a)所示,胶囊表面为锥面,可以用锥面几何函数表示为:
锥表面: (2-11)
同样,球表面是以Oi(xi,yi,0)为中心的球面,可以表示为:
(2-12)
沿锥面直线OP的y分量和z分量(图2.5(a))可以用x分量表示,
直线OP: (2-13)
(2-14)
为了求出球体(球面)与被膜(锥面)之间的最小截面积Ath,首先需要求出锥面OP线到球面的最小距离。从直线到球面的最短距离也是从球面中心到直线减去球面半径的最短距离(图2.5(b)中的直线AD)。
当球沿球囊表面旋转时,其中心轨迹表示为:
(2-15)
直线OP上点(x, y, z)到球中心(xi,yi,0)的距离的平方是:
(2-16)
微分方程(2.16),并使其等于0,得到直线OP上离球中心最近的点
(2-17)
(2-18)
(2-19)
最近的点记为点D,最短的距离记为OiD。
将式(2.17-2.19)代入(2.16)得:
(2-20)
用OiD减去球的半径,得到从直线OP到球面的最短距离。
(2-21)
节流面积如图2.5(b)中阴影部分所示,可分为无限多个梯形单元,如图2.5(b)中ADEF所示。弧段AF和DE的长度为:
因此,梯形单元的面积ADEF可以计算为:
(2-22)
由于OiD是的函数,需要推导和之间的关系来积分dA。角与角的关系如图2.5(c)所示。
BB #39;是球囊系统在A点的横切面,垂直于x轴。BB #39;上的内圆代表球的横截面,外圆代表圆锥的横截面。根据正弦定律,在三角形O #39;iA中
由于O #39;和O #39; i在球囊系统中非常接近。因此可以做出以下近似。
结果是:
因此:
由等式(2-22)得,
节流面积可以计算为dA与x轴的卷积,
得:
为圆锥顶点O与球心Oi沿x轴的距离,xin为初始位置值,为球的转角。通过使用rcap和rb表示xin,可以将上述xlift方程转化为式(2.9)。为了验证上述公式,在Pro-Engineer软件中绘制并测量了节流面积。由图2.6可知,ProE得到的Ath值与式(2.8)得到的Ath值吻合较好,其中yi为式(2.15)中定义的球中心纵坐标。
(a)胶囊和球体几何形状
图2.5 球囊系统的几何表示
图2.6 理论和ProE Ath值比较
2.2.3降阶模型
目前,球囊系统的动力学建模已经完成。但是,如果系统的阶数较高,将用于以后胶囊内壁轮廓设计的动态规划方法将承受较大的计算负担。因此,我们希望减少模型的顺序,同时仍然捕捉系统的主要动态。由于流体的体积模量比流体体积大得多,因此可以合理地假设整个胶囊从孔板到排气口的容积流量是相同的(q1=q2=q3),从而得到二阶模型,其表达式为:
(2-23)
得:
(2-24) (2-25)
通过一系列的仿真结果验证(如图2.7所示),二阶球囊模型与四阶球囊模型有很好的近似关系,因此将在接下来的分析和设计部分中使用。
图2.7 二阶模型与四阶模型仿真结果比较
2.3 系统动力学分析
本节将分析球囊系统的稳定性,为系统的设计提供参考。从图2
资料编号:[4870]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

