英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
第八章 平顺性和行驶稳定性
真正的道路远非平坦。即使是刚铺好的公路也有一些小瑕疵,其通过激励车辆垂直振动从而影响车辆动力学。
路面不平滑的缺陷会影响车辆的舒适性和行驶稳定性。改善舒适度基本上意味着限制车身和乘客的垂直加速度变化。除其他外,改善行驶稳定性意味着限制每个轮胎与路面交换的垂直力。悬架刚度和阻尼是影响舒适性和行驶稳定性的主要参数。
在崎岖不平的道路上的车辆匀速直线行驶振动特性的研究在页码[1–4, 7, 8]有讲到。更准确地说,乘用车处理的频率范围为0.25–25Hz,对于赛车来说稍高一些。轮胎由于其垂直弹性和低质量,可以在高频下吸收小的路面不规则性。但是,对于低于3Hz的频率,轮胎的影响很小,可以认为是刚性的。因此,吸收较大颠簸的负担落到车辆悬架上。
在研究车辆的行驶稳定性时,我们也考虑了悬架几何形状,我们这里集中讨论弹簧和减震器。我们寻找选择适当刚度和适当阻尼量的标准
事实上,这只是事实的一半。实际悬架具有非线性特性的弹簧和减振器,其特征不能像在线性情况下简化为一个数量。然而,具有线性行为的悬架是一个很好的开始来研究行驶稳定性。
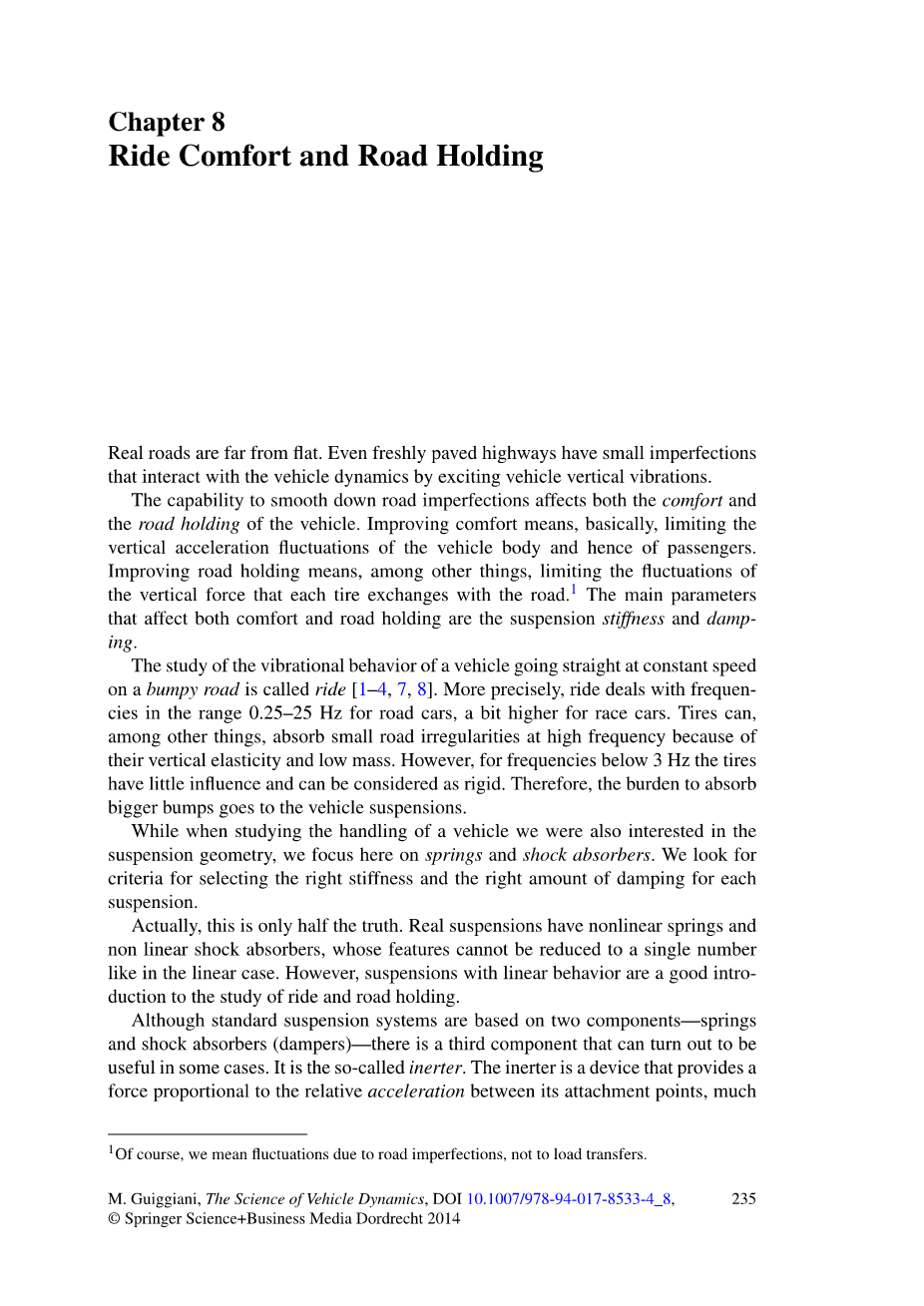
尽管标准悬架系统基于两个部件——弹簧和减震器,在某些情况下,还有第三个组件是有用的。这就是所谓的惯性器。惯性器是一种提供与其连接点之间的相对加速度成比例的力的装置,很像减震器提供与相对速度成比例的力,弹簧提供与相对位移成比例的力(图8.1)。
图8.1:弹簧、减震器和惰轮示意
=k(zminus;y)
=c(minus;) (8.1)
=b(minus;)
它确实没有被使用,直到最近。典型的惯性器包括飞轮,飞轮的旋转与其两端之间的相对位移成比例。到目前为止,它已经在一些方程式赛车中使用。我们将展示它如何在某些情况下改善汽车的平顺性和行驶性。
8.1道路行驶与稳定性的车辆模型
我们对车辆的垂直运动最感兴趣。保持我们的驾驶分析很简单,我们假设车辆以恒定速度直线行驶。因此,这里没有处理和/或性能影响。由于路面不平,行驶分析开始发挥作用。事实上,我们要求的是一条非常特殊的道路,尽管并不平坦。对于同一轴的两个车轮,它必须具有完全相同的性能,因此根本不会引起侧倾运动。这意味着我们可以依赖于一个二维模型。
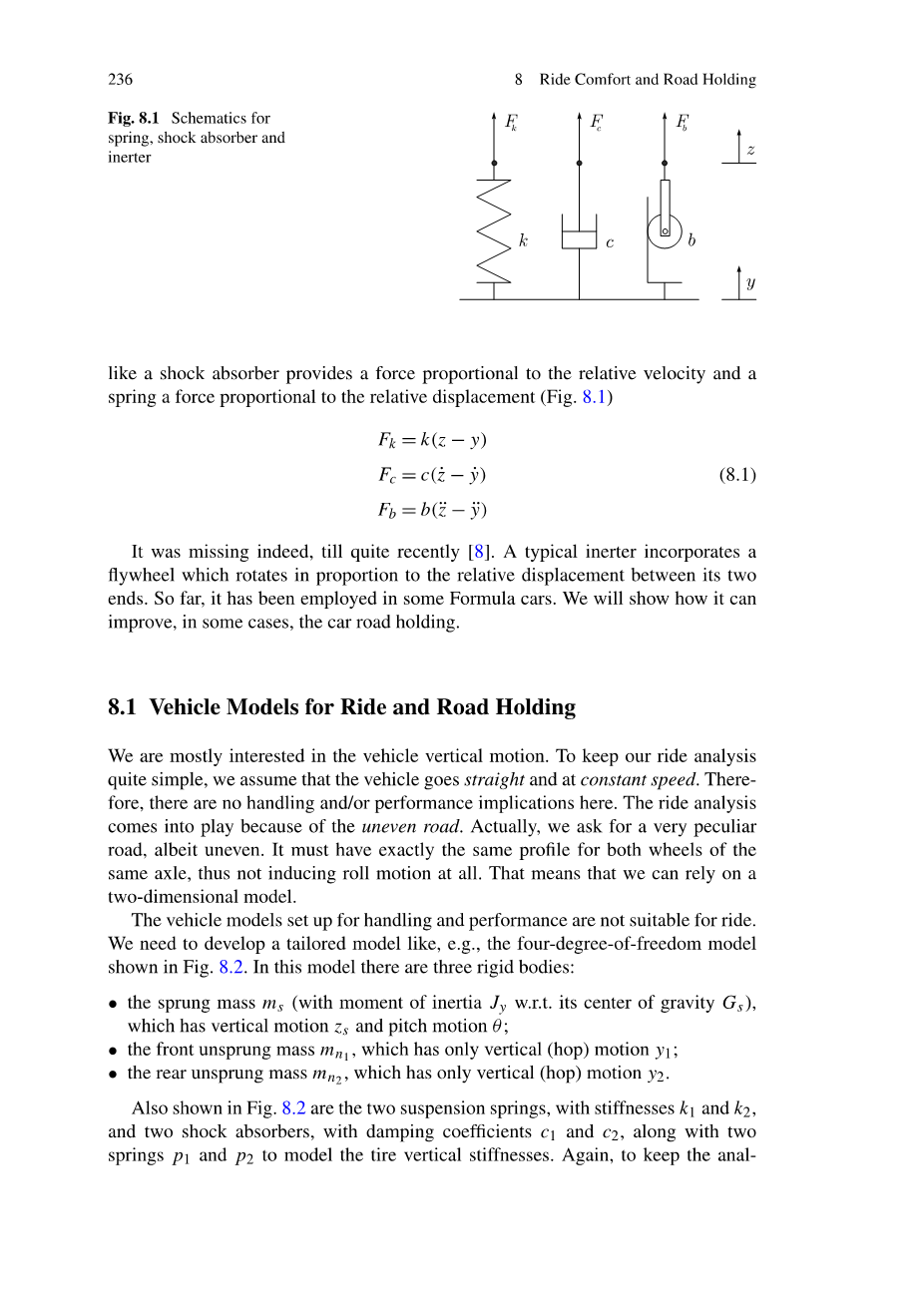
为操纵和性能而设置的车辆不适合乘坐。我们需要开发定制的模型,例如四自由度模型如图8.2所示。在此模型中有三个刚体:
·簧上质量(转动惯量为其重心),其具有垂直运动和俯仰运动;
·前簧下质量,其仅具有垂直(跳跃)运动;
·后簧下质量,其仅具有垂直(跳跃)运动。
在图8.2中还示出了具有刚度和的两个悬架弹簧,以及两个减震器,具有阻尼系数和,以及两个用于模拟轮胎垂直刚度的弹簧和。再一次为了使分析简单,我们假设所有这些组件都具有线性行为。这是一个非常不现实的假设,因为实际悬架被设计成具有硬化刚度,并且在拉伸循环期间配备有比压缩循环具有更大阻力的减震器。
图8.2研究行驶平顺性和行驶稳定性的四自由度模型
图8.2还表示出了惯性器和。他们使用较少,只在一些赛车上使用。加上它们是为了更具一般性。
图8.2所示的车辆模型具有四个自由度。点和分别是前轴接触面和后轴接触面的中心。两个函数( t )和( t )是汽车通过轮胎“感觉到”的路面情况。
弹簧质量具有两个自由度和。或者,我们可以使用垂直位移和表示。所有位移和旋转都是绝对的,并且取自车辆的静态平衡位置。我们正在研究相对于平衡位置的振荡,即车辆在完全平坦的道路上的位置。
图8.2所示的车辆模型通常由三组方程式控制:
(1) 同余方程:
= theta; (8.2)
= minus; theta;
这是坐标之间的纯粹几何关系;
(2)平衡方程:
=
= minus;
= minus; (8.3)
= minus;
即力或力偶与加速度之间的联系;
(3)本构方程:
= minus;( minus; ) minus; ( minus; ) minus; ( minus; ) = minus;( )
= minus;( minus; ) minus; ( minus; ) minus; ( minus; ) = minus;( ) (8.4)
= minus;( minus; )
= minus;( minus; )
其对弹簧、减震器和惯性器进行建模。
和分别表示簧上质量和两个簧下质量。和是指每个轴受道路的反力。所有力都必须作为相对于静态平衡位置的作用力。这就是为什么重量没有包括在计算中
结合上述方程组,我们得到了一个四线性常系数微分方程组。它们是该车辆模型的控制方程。
M C Kw = h (8.5)
其中w=w(t)=((t),(t),(t),(t))是坐标向量,h=h(t)=(0,0,(t),(t))是道路激励。我们也有质量矩阵M。
M=
= (8.6)
阻尼矩阵C
C= (8.7)
和刚度矩阵K
K=
= (8.8)
线性四自由度系统在原理上相当简单,但在没有计算机辅助的情况下进行分析处理也相当麻烦。因此,为了教育目的,进一步简化该模型是有用的。其基本思想是提取两个模型,两个模型都具有两个自由度。一个模型研究自由振动,另一个模型研究强迫振动。这两个模型实际上是通过从四自由度系统中去掉不必要的部分(图8.3中的灰色线)而获得的。
簧载质量总是远远高于总簧载质量= 。通常我们有asymp;10。此外,除方程式赛车外,轮胎刚度远高于悬架刚度。通常,=6-12。因此,轮胎对自由振动影响很小,可视为刚性轮胎,如图8.3 (顶部)所示。在方程式赛车中,=1-2。
另一方面,道路干扰也涉及高频,必须考虑疲劳。为了研究强迫振动,车辆被分成两个半车模型,如图8.3 (底部),其中
= = (8.9)
代替半车模型,通常使用四分之一车模型,这类似于所有数量除以2的半车模型。
这两种模型都是相当粗略的近似,但它们可以提供非常有用的见解,说明如何选择弹簧和减震器(以及,仅在一种情况下,惯性器也是如此)。
图8.3研究自由振动(顶部)和强迫振动(底部)的两自由度模型
8.2四分之一车型
四分之一车型如图8.4所示。为了简单起见,我们去掉了下标。该模型包括经由主悬架连接到车轴的非簧载质量到簧载质量。假定悬架具有刚度k和阻尼系数的线性特性。还包括具有惯性b的惯性器。轮胎的垂直弹性又由线性弹簧p表示。轮胎阻尼太小,可以忽略不计。
图8.4四分之一车型
该模型主要用于研究车辆在不平路面上行驶时的振动行为。因此,p的最低部分从道路接收正弦位移h(t)=HcosOmega;t.有人可能反对真实道路的形状不是正弦曲线。然而,长度为L的任何道路曲线g(x)可以由其傅立叶级数表示,该级数是三角函数的无穷和。幸运的是,可以只使用前n个术语,而不丢失太多信息。如果车辆以速度u行驶,则具有空间周期L/n的傅立叶项用作频率=nu/L的偏移。因此,激励的频率显然取决于车辆的速度。
g(x)= (8.10)
由于四分之一车模型的假定线性,我们可以利用叠加原理,一次给系统“馈送”一个傅立叶项。如果系统是非线性的,这个技巧将毫无意义,我们不能再应用一个简单的正弦强迫函数。四分之一汽车模型是一个阻尼二自由度系统。我们采用弹簧质量的垂直位移z和弹簧质量的垂直位移y(跳跃)作为坐标。路面垂直位移h(t)可由路面坡度和车速得出。四分之一车模型的运动方程可从图8.4 (推荐)中容易地获得,或者作为第8.1节中给出的方程的特殊情况。
= minus;b( minus; ) minus; c(minus;) minus; k(z minus; y)
= minus;b( minus; ) minus; c(minus;) minus; k(y minus; z) minus; p(y minus; h) (8.11)
其中,如已经陈述的,h(t) = HcosOmega;t是由于道路凹凸不平引起的激励。矩阵表示法中的相同方程变为
M C Kw = h (8.12)
用质量矩阵M
M== = (8.13)
阻尼矩阵C
C= (8.14)
和刚度矩阵K
K== = (8.15)
我们主要关注稳态响应,即微分方程组( 8.11 )的特殊积分。在这种情况下,它可以表示为:
z(t)=Zcos(Omega;t ϕ) (8.16)
y(t)=Ycos(Omega;t )
即在具有相同激励角频率Omega;的振荡中,但也具有非零相位ϕ和.
如果采用复数,数学分析就简单得多。因此,强制函数被给出为:
h(t)=H(cosOmega;t isinOmega;t)=H (8.17)
对于Hisin;R,稳态解为:
z(t) = Z[cos(Omega;t ϕ) i sin(Omega;t ϕ)] = Z = Z = Z
y(t) = Y[cos(Omega;t psi;) i sin(Omega;t psi;)] =Y = Y = Y (8.18)
其中Z = Z和Y =Y是具有模Z和Y的复数,并且具有ϕ和psi;。
将这些表达式插入( 8.11 )并去掉,得到复未知量Z和Y中的如下代数方程组:
(8.19)
解决方案为:
p( (8.20)
和
p (8.21)
其中,为了简化紧凑:
d()=
e()=( (8.22)
( 8.20 )和( 8.21 )中给出的无量纲复函数()和()可直接用于求解稳态解
z(t) = H
y(t) = H (8.23)
从实际的角度来看,我们对这些振荡的幅度作为的函数最感兴趣
(8.24)
(8.25)
然而,也可以获得相
tan ϕ= , tan= (8.26)
簧上质量和簧下质量的垂直加速度的幅值分别由Z和Y给出。
由于振动,轮胎与路面交换的垂直力有波动。更精确地说,我们有一个正弦力N叠加在恒常力上,这是由于重量,也可能是由于空气动力的下压力。从图8.4的四分之一车模型中我们得到
N= p(h minus; y) = p(H minus; Y) (8.27)
从( 8.21 )中,我们得到振幅N作为角频率的函数
(8.28)
8 . 2 . 1惯性器作为弹簧软化器
值得注意的是,所有这些表达式都包括术语。这是理解惯性器(也称为J阻尼器)的关键。这很像具有悬挂刚度对激励频率omega;敏感的系统。在低频asymp;k时,但在高频≪k时,强度b用作弹簧软化剂。在方程式赛车上高空气动力负荷是一个非常有趣的功能,因为我们可以使用非常硬的弹簧,从而限制了由于可变的空气动力下压力,但同时汽车将能够吸收高频路面凹凸不平,就好像它配备了不太硬的弹簧。我们将在第8 . 3 . 3节中对这一思想进行定量和更详细的阐述。
8 . 2 . 2四分之一车的固有频率和振型
线性二自由度振动系统,无论阻尼与否,都有两个自然模态,每个模态与其固有频率相关。
为了得到这两种模式,我们考虑微分方程组( 8.12 )的齐次对应
M C K = 0 (8.29)
我们寻求的解决方案如下
= x (8.30)
当插入( 8.29 )时,产生
(8.31)
mu;的四个值使( 8.30 )真正成为一个解是特征方程的根
(8.32)
在欠阻尼振动系统中,四个mu;是复数,成对复合共轭
(8.33)
其中0le; lt; 1为阻尼比(或阻尼因子),为无阻尼系统的固有角频率。阻尼系统(即四分之一汽车模型)的两个固有角频率为 =.
一旦得到了四个,我们就可以回到( 8.31 )并得到相应的广义特征向量isin;,也就是复共轭对。( 8.29 )的通解是复指数函数的线性组合
(8.34)
作
全文共11518字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16943],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

