
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
一种自适应巡航控制系统汽车
摘要:本文提出了一种具有纵向控制器的自适应巡航控制系统,其跟随自主车辆中的前方车辆。测试车辆中的自适应巡航控制系统识别位于测试车辆前方的前方车辆,并通过控制其加速器和制动器将测试车辆与前方车辆隔开一定的安全距离。前方车辆距离导致的车辆距离误差可以通过从安装在后续车辆前侧的激光扫描仪获得的距离信息来确定。后续车辆中的加速控制通过将人为地在速度控制单元处产生的APS(加速度位置传感器)信号发送到ECU(电子控制单元)来执行速度控制。本研究提出的自适应巡航控制系统采用CARSIM和SIMULINK进行仿真,经过多次实车试验后,其性能也被证明是非常实用的。
关键词:自适应巡航控制系统,自动车辆,激光扫描仪,APS,CARSIM,SIMULINK
- 介绍
近年来,先进安全车的研究已经广泛开展。在这里,安全技术分为两种不同的类别。一种是被动安全,即手动式安全的概念,其中包括自20世纪50年代以来安装的安全带,通过限制乘客在车祸后的行为将其生命和损失降至最低。另一种是主动安全,即除了基于各种电子控制系统的驾驶容易性之外,提高不同驾驶条件下车辆的驾驶性能的概念。在主动安全技术中,为了提供长途驾驶的便利性而保持特定速度,不应用加速踏板的系统被称为巡航控制系统。在表示恒定速度的巡航控制驾驶中,仅通过速度控制来执行驾驶。 因此,不可能保证车辆前方的车辆和障碍物的安全。 因此,一些关于自适应巡航控制(ACC)系统的研究已经在很大程度上进行了,该系统用于监视前方的交通状况并防止由疏忽造成的事故。
在ACC系统中,首先要考虑的是驾驶过程中车辆司机或障碍物的安全性。因此,ACC系统被分为两个不同的问题;一个是执行纵向控制以维持车辆之间的车辆距离并实施速度跟踪,另一个是横向控制以保持车道并防止车道偏离。
在这项研究中,在该研究中,实施了根据前车的距离控制车辆的ACC系统的研究。用于开发ACC系统的车辆是由起亚汽车公司制造的SUV,Mohave,并且车辆被改装。另外,一个激光扫描仪,SICK的LMS-291被用于测量碰撞和避开前方车辆的距离。为了实现车辆的加速和减速控制,使用开关逻辑设计PID控制器。使用停止距离和测量的车辆距离计算出的车辆距离误差应用于PID控制器的输入。根据车辆距离误差,加速系统使用电子控制单元(ECU)基于安装在车辆上的APS的信号执行加速度控制。 另外,减速系统通过将RC伺服电机连接到制动踏板来基于电机控制执行减速控制。
- 硬件构成
在本节中,将描述用于实现ACC系统的车辆和设备的特征和结构。
2.1自主车辆
这项研究中使用的车辆是由起亚汽车公司生产的SUV,拥有一台3000cc柴油发动机和一台自动变速箱。 图1显示了应用于本研究实验的改进车辆。 在这里,激光扫描仪安装在保险杠内。
图1 自动驾驶车辆,Kia Mohavi 图2 APS组装和APS销排列
2.2加速控制系统
在之前的研究中,使用了一种控制直接连接到节气门体或踏板的执行机构的方法来实现加速控制[12]。但是,在测试车辆Mohave的情况下,它使用安装在加速踏板上的加速度位置传感器(APS)执行这种加速度控制。 因此,在这项研究中建议使用安装在测试车辆上的APS来执行加速控制。 APS包括两个独立的信号,其中这两个信号通过安装在加速踏板上的可变电阻器将输出电压传输到ECU以执行车辆的加速控制。 图2显示了APS的安装配置。
图3表示本研究中提出的方法。表格1显示了来自安装在这辆测试车上的APS的输出信号的分析结果。然后,通过使用这些分析的APS信号的速度控制单元产生ECU的输入信号来执行车辆的加速控制。速度控制单位是由机电一体化实验室的作者设计的。
图3 车辆加速控制
表1 APS规范
|
状态 |
输出电压(V) |
|
|
APS1 |
APS2 |
|
|
空闲状态 |
0.7~0.8 |
0.275~0.475 |
|
完全加速 |
3.8~4.4 |
1.75~2.35 |
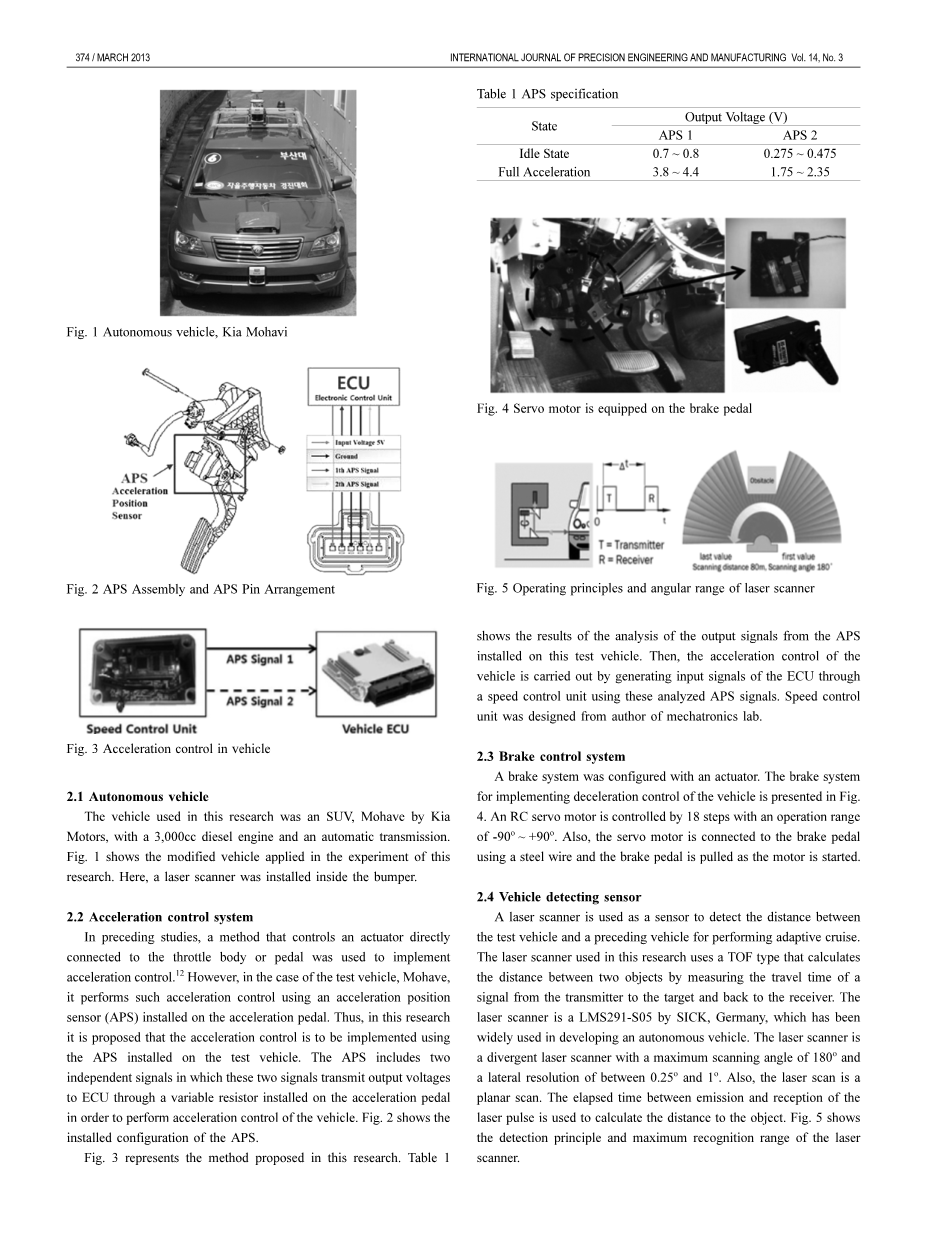
2.3制动控制系统
制动系统配置有执行器。图4给出了用于实现车辆减速控制的制动系统。一个RC伺服电机由18步控制,具有-90°~ 90°的操作范围。 另外,使用钢丝将伺服电机连接到制动踏板,并在电机启动时拉动制动踏板。
图4 在制动踏板上装伺服电机 图5 激光扫描仪的工作原理和角度范围
2.4车辆检测传感器
使用激光扫描仪作为传感器来检测测试车辆与前行车辆之间的距离以进行自适应巡航。本研究中使用的激光扫描仪使用TOF类型,其通过测量行驶时间来计算两个物体之间的距离,信号从发射机到目标并返回到接收机。该激光扫描仪是德国SICK公司生产的LMS291-S05,已广泛用于开发自动驾驶汽车。激光扫描仪是一个发散激光扫描仪,最大扫描角度为180°,横向分辨率为0.25°到1°。另外,激光扫描是平面扫描。发射和接收激光脉冲之间的时间间隔用于计算到物体的距离。图5显示了激光器的检测原理和最大识别范围扫描器。
- 主动巡航控制系统
基本上,ACC系统表示一种控制方法,其通过保持与在前车辆之前的车辆的安全距离来驾驶车辆。在本节中,描述了ACC系统的驱动算法。
3.1驾驶算法
ACC系统中的驱动算法如图6所示。ACC系统的控制系统可根据前方车辆的存在分为车辆碰撞减轻控制和巡航控制。在呈现前方车辆的情况下,操作基于到前方车辆的安全距离的车辆碰撞缓解控制。由于没有出示前面的车辆,所以巡航控制与普通巡航控制相同[13]。
图6驱动算法框图
图7 激光扫描数据的坐标转换
图8 停止距离的含义
3.2目标检测
ACC系统中的前行车辆的检测可以使用安装在测试车辆上的激光扫描器来执行。
安装在测试车辆上的激光扫描仪产生极坐标系统的距离信息。 如图7所示,极坐标系中产生的距离信息被转化为笛卡尔坐标系的坐标系,其中x,y由方程(1)。
(1)
关于车辆检测和车辆距离,可以使用前车的边缘的起点和终点之间的角度及其平均值来获得车辆距离。 此外,为了在检测边缘区域之前增加计算速率,仅在ROI(兴趣区域)中呈现的数据按照等式(2)。
(2)
其中,是测量的车辆距离,将的项表示为由数据索引确定的传感器的角分辨率,是检测点与传感器之间的距离,是从极坐标系转换而来的笛卡尔坐标系中的值,代表可检测的最大范围的激光扫描仪。在这项研究中,激光扫描仪的最大范围为80米,定义采样时间为26毫秒。
3.3安全距离
国内道路交通法确定的安全距离声明,沿同一方向跟随前方车辆的车辆应确保车辆距离以避免可能的碰撞。
因此,能够避免与前车辆碰撞的安全距离由根据后续车辆速度决定的停止距离来限定。
车辆的停车距离通常取决于车辆的思维跑步距离和制动距离之和,如公式(3)。而且,其配置在图8中给出。
(3)
其中,为制动距离,为思维跑步距离。
因此,代表制动距离和思考跑步距离的总和,自适应巡航中前车的安全距离可以定义为公式(3)。
基于牛顿的第二运动定律,车辆的制动距离可以定义为方程 (4)。
(4)
其中,是车辆质量,是车辆的重力加速度,是线性减速度,是空气阻力,是前轴制动功率,是后部由制动转矩产生的轴制动功率。而是中心重力高度。
车辆速度低,如果制动过程中施加在车辆上的力恒定,等式(5)可以用以下简单的等式推导出来。
(5)
其中,是由由纵向减速产生的施加于车辆的力。由于是不变的,所以从到的积分呈现为(6)式。
(6)
其中,是制动应用中的初始速度,是由制动应用产生的最终速度。 因此,行驶距离,在减速行驶中可以被确定为速度和距离的等式如公式(7)所示。
(7)
这里,车辆因减速变为0而停车时,由减速引起的制动距离可以使用方程(8)。
(8)
也就是说,它表明制动距离与其速度平方成正比。
另外,在减速过程中由于空气阻力造成的减速度不能忽视。车辆的气动阻力与气动阻力系数有关,速度的平方可以定义为方程(9)。
(9)
其中,是前轮和后轮的总制动力,是空气阻力。 因此,考虑到气动阻力的车辆制动距离在式(10)。
(10)
当驾驶员感觉到车辆速度的危险时,可以通过驾驶员响应时间的平方来获得思维跑步距离。然而,作为自动控制系统取代驾驶员的制动行为,思考运行距离可以由传感器的采样时间来确定。 因此,自适应巡航中的思考跑距可以确定为方程(11)。
(11)
车距的误差是通过使用(3)式从激光扫描仪的安全距离中减去激光扫描仪测得的距离来确定的。另外,其配置在图9中给出。
图9 ACC系统中的距离
车辆距离的误差可以定义为方程(12)。
(12)
自适应巡航中的加速/减速控制器是根据车辆之间的误差使后续车辆与前车保持安全距离的条件下设计的。
- 控制器设计
在本节中,描述了使用系统识别的车辆中的加速器和控制系统的配置。
4.1系统识别
系统识别方法处理基于测量数据找到动态模型的数学模型的问题。
在这项研究中,加速度控制器的传递函数是使用MATLAB的系统辨识工具箱得出的。
加速度控制器的输入和输出分别由APS的电压值和速度决定。图10显示了输入和输出的信号。
使用加速度控制器的输入和输出信号导出传递函数的阶数和控制系数。图11表示其估计性能。
在估计值2的情况下,其最佳条件的结果显示为89.63%。
因此,通过应用系统识别方法得到的传递函数可以为方程(13)。
(13)
图10 输出信号输入的传递函数 图11 测量和模拟输出
4.2 ACC系统配置
本研究中的控制系统分为高级和低级,其配置如图12所示。
图12 ACC系统配置 图13 使用CARSIM获得的车辆质量
在高级别中,对于,它表示基于车辆距离误差的加速度,对于,它表示根据输入速度减速。在图12中应用加速/减速切换逻辑的PID控制器表现出K(S)_1和K(S)_2,并且可以被定义为方程(14)和方程(15)。
(14)
(15)
公式(14)中的加速度项是加速踏板的目标控制位置值,公式(15)中的项是制动踏板的控制目标位置的角度。另外,,和项表示PID的控制增益控制器,并且通过仿真获得的调谐值被用于这些项。以表示车距误差,并且误差的初始值被定义为,当控制输入被确定为初始值时,车辆停止。
在低电平时,可使用基于在高级别控制目标值的微控制单元(MCU)来执行加速/减速控制。
- 仿真和实验
在本节中,车辆的自适应巡航控制系统通过仿真进行测试,并通过将其应用于实际车辆来评估驾驶性能。
5.1 ACC模拟
使用CARSIM,SIMULINK等车辆运动学程序,根据前方车辆与后方车辆之间的距离误差进行自适应巡航的模拟。
在该模拟中,驾驶被配置为单一方向,并且施加于车辆的空气阻力被忽略。 该仿真中使用的参数值与起亚汽车的测试车辆Mohave相同。
表2显示了此模拟中使用的参数值。 图13表示使用CARSIM获得的测试车辆的簧上质量。
表2 车辆的参数
|
参数 |
值 lt;全文共10203字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[15719],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

