
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
一种新型变刚度弹簧半主动悬置的性能分析
莫哈巴塔.阿扎迪 加里.福克纳 赛义德·贝扎迪普
摘要:建立了一种新型变刚度悬置(VSM),并对其性能进行了实验测量和分析。VSMS在包括汽车工业在内的机械振动控制中有着广泛的应用。该设计中的变刚度是由基于奇异结构的索系机构的预应力刚度来实现的。通过压电致动器和简单的通断控制器改变预应力,在短时间内和低能量成本下产生显著的刚度变化。通过静态和动态试验对VSM的刚度进行了表征。然后对VSM的性能进行评估,并与等效被动安装在两个主要的可传递性和减震区域进行比较。半主动VSM的响应时间也在实际场景中测量。最后给出了性能测试的总结。
关键词:可变刚度弹簧 可变刚度安装
1。介绍
主动和半主动安装/隔离器用于要求和挑战性的振动控制应用,其中被动安装不能提供足够的响应。半主动系统可以设计成实现主动系统的大部分性能。此外,半主动支架具有不复杂的控制系统,比主动安装消耗更少的能量,并且提供了一种成本有效的解决方案。因此,它们被广泛应用于工业应用〔1—5〕。振动悬置具有两个基本的振动特性:阻尼和刚度。在半主动安装中,这些特性中的一个是可变的。在这项工作中讨论的半主动安装,称为可变刚度安装(VSM),使用可变刚度弹簧。这种变刚度弹簧被称为对抗变刚度弹簧(AVS)。AVS在需要时提供刚度,在不需要时保持不活动。VSM的阻尼是恒定的。在VSM中有一个附加的恒定刚度来支持自重。在以前的工作[6,7]中首次引入了基于AVS的力控半主动悬置的概念。对变刚度振动系统进行了研究,并在[1—3,8,9]中对噪声和振动的应用进行了综述和分类。基于这些研究,VSM是一种机械半主动安装。VSM是一种预紧力机构,其刚度可以通过控制机构连杆的对抗力(预应力)来改变。不同于基于几何变化[1,8]的刚度变化的其它机械可变刚度元件,VSM使用力控制来改变刚度,并且因此具有更快的响应[6,7]。在以下两部分中,简要回顾了AVS和VSM。
1.1。对抗变刚度弹簧(AVS)
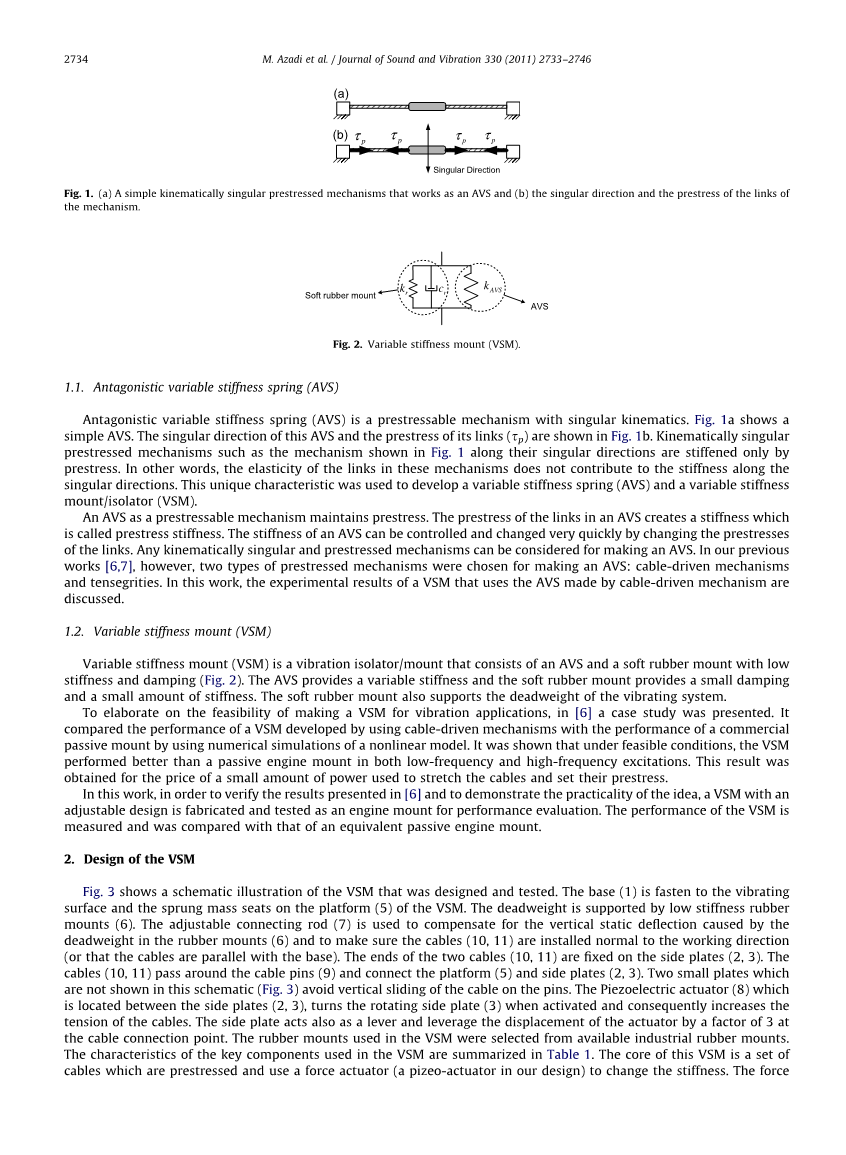
对抗变刚度弹簧(AVS)是一种具有奇异运动的预应力机构。图1A示出了简单的AVS。在图1b中示出了该AVS的奇异方向和其连接的预应力()。运动学奇异的预应力机构,如图1所示的机构沿其奇异方向仅由预应力加强。换言之,这些机构中的连杆的弹性不影响沿奇异方向的刚度。这种独特的特点被用来开发可变刚度弹簧(AVS)和可变刚度安装/隔离器(VSM)。
图1。(a)一个简单的运动学奇异的预应力机构,用作AVS和(b)机构的连杆的奇异方向和预应力。
AVS作为预应力结构保持预应力。AVS中的连杆的预应力产生一个刚度,称为预应力刚度。AVS的刚度可以通过改变连杆的预应力来快速地控制和改变。任何运动奇异和预应力机制可以考虑AVS。然而,在我们以前的工作[6,7]中,选择了两种类型的预应力机构来制造AVS:缆索驱动机构和张力环。本文讨论了采用电缆驱动机构的AVS的VSM实验结果。
1.2。变刚度安装(VSM)
可变刚度安装(VSM)是由AVS和具有低刚度和阻尼的软橡胶支座组成的隔振器/安装件(图2)。AVS提供了可变刚度,软橡胶支座提供了较小的阻尼和少量的刚度。软橡胶支座也支持振动系统的自重。
图2。变刚度安装(VSM)。
为了阐述振动应用VSM的可行性,在[6 ]中提出了一个实例。通过使用非线性模型的数值模拟比较了使用电缆驱动机构开发的VSM与商业无源安装的性能。结果表明,在可行的条件下,VSM在低频和高频激励下均优于被动发动机悬置。这一结果是为了用少量的电力来拉伸电缆并设置预应力。
在这项工作中,为了验证在[6 ]中提出的结果,并证明该想法的实用性,制造具有可调设计的VSM,并作为性能评价的发动机悬置进行测试。测量了VSM的性能,并与等效被动发动机悬置进行了比较。
2。VSM的设计
图3示出了设计和测试的VSM的示意图。底座(1)固定在振动表面和弹簧质量座上,在VSM的平台(5)上。自重由低刚度橡胶支座(6)支撑。可调连杆(7)用于补偿由橡胶支座(6)中的自重引起的垂直静挠度,并确保电缆(10, 11)安装在工作方向上(或电缆与基座平行)。两条电缆(10, 11)的端部固定在侧板(2, 3)上。电缆(10, 11)通过电缆销(9)并连接平台(5)和侧板(2, 3)。在这个示意图(图3)中未示出的两个小板避免了电缆在销上的垂直滑动。位于侧板(2, 3)之间的Piezoelectric致动器(8)在激活时转动旋转侧板(3),从而增加缆绳的张力。侧板也起到杠杆作用,并在电缆连接点上使致动器的位移以3倍的杠杆作用。在VSM中使用的橡胶支座是从现有的工业橡胶支座中选择的。VSM中使用的关键部件的特性总结在表1中。该VSM的核心是一组预应力的电缆,并使用力致动器(在我们的设计中的PIDEO致动器)来改变刚度。电缆中的力变化伴随着电缆拉长引起的小位移。关于设计的理论背景和设计细节,读者可以参考[6]。
图3。设计和建造的对抗可变刚度安装(VSM)的示意图。
表1。设计和制造的VSM中关键部件的特点。
|
图3中的标签 |
名称 |
种类 |
参数 |
|
10、11 |
电缆 |
7times;49钢丝绳镀锌钢 |
标称直径:1.98毫米/分钟,断裂强度:2500 N,测量弹性E=79.8 GPa,电缆有效长度(LE):17毫米 |
|
8 |
压电致动器 |
高压和高冲程压电驱动器(P—23 5.4pi;公司) |
最大位移:60mu;m 最大压缩力:30千牛顿 输入电压(0~1000伏)由快速响应放大器(PI-508. OE)馈电 |
|
6 |
橡胶支座 |
诺维巴M50A工业橡胶支架 |
静刚度:0.52times;105 n/m 动刚度:0.85times;105 n/m 阻尼:120纳秒/米 |
图4所示的实际样机具有可调节的设计,以便于测试过程。例如,可以改变电缆的长度和布置以及低刚性橡胶支座的数量。然而,这些特征增加了VSM(22times;21times;14立方厘米)的整体尺寸。如果VSM将被设计用于特定的应用,其尺寸可以更小,并且在可用液压发动机安装的范围内。
图4。设计VSM。
为了比较VSM与无源等效安装的性能,使用了如图5所示的两种配置。在图5A中,两个橡胶支架被用于关闭AVS。此配置表示被动安装。因此,根据表1中提供的信息,该被动悬置的动态刚度(Kr)和阻尼(CR)分别为1.7times;105 n/m和240 nS/m。VSM的配置如图5B所示。四个橡胶支座用于制造VSM的低刚度(KR)和低阻尼(CR)。由于橡胶支座的新布置,刚度(KR)和阻尼(CR)在以前的配置中是KR和CR的一半,模拟等效被动安装。AVS在某些时间被接通以增加整体刚度。
图5。橡胶支座的布置:(a)表示无源安装(不使用AVS)的配置和(b)表示VSM的配置。
三。模型的建模与参数辨识
针对所提出的VSM,建立了数学模型。该模型用于预测VSM的性能。这些知识对于控制和/或设计改进是必要的。
首先,尝试将VSM建模为线性弹簧和阻尼器,其中刚度来源于软橡胶支座的刚度和电缆的预应力。然而,发现这种模型不能准确地预测VSM的性能。主要原因是钢丝绳股之间的摩擦,在高预应力范围内引入了显著的非线性效应。此外,由于这种摩擦不是常数项,它不能被建模为库仑阻尼。最后,基于动态刚度试验的VSM的力-位移关系,建立了一个简单的模型。在静态和动态刚度测试结果之后,将对VSM模型进行说明。
动态试验机(图6)用于VSM的静态和动态刚度。这种特定的伺服液压机可以可靠地产生准静态位移,并要求在基座频率低于15赫兹的正弦信号。平台连接到固定顶部夹具。收集了基础与平台之间的相对位移、平台的受力和VSM的预应力。
图6。建立了动态试验机。
3.1。静刚度试验
为了研究VSM的静刚度,确定了平台上施加的力与平台和基座之间的相对位移之间的关系(图7)。在平台上施加外部载荷之前,施加0.54 kN的自重。这个自重模拟了孤立质量的重量。在这个实验中,自重是由一个发动机支座所承载的发动机重量的一部分。由于这个原因,曲线在A点开始,此时,电缆变成水平和垂直于位移方向,如图3所示。然后在准静态的基础上,位移为plusmn;4 mm,而在一个试验中电缆预应力设为零,另一个则为4 kN。通过引入位移,增加了索力。例如,当4 kN预应力设置在零位移时,当基座位移为4 mm时,索力达到9 kN。
图7。VSM的静态测试:(-)电缆预应力=0 kN和(-)电缆预应力=4 kN。
机械和建筑物振动的共同位移范围是在0.02至2毫米之间的峰到峰值,这发生在10和100赫兹(11)之间的频率。因此,作为振动悬置的VSM的最大工作范围将是2毫米的峰到峰(或plusmn;1毫米)。最大工作范围由力-位移图中的两条垂直线示出(图7)。然而,作为发动机悬置的VSM需要较小的工作范围:plusmn;0.3 mm(12)。在静刚度试验中,VSM位移为plusmn;4 mm,是最大工作范围的四倍,为VSM偏转到新平衡时的刚度变化提供了深入的了解。
在高预应力(4 kN)下,滞回效应是由索股之间的摩擦引起的。当预应力为零时,滞后在工作范围内可忽略不计。相反,当预应力为4 kN时,这种效应变得显著。滞回效应,如将在动态刚度试验中看到的,显著地改变了VSM的动态刚度。这些研究人员最初没有意识到这种迟滞效应。如第4节所示,滞回作用有利于在高预应力下提供更多的阻尼,并增加有效的动刚度。
VSM的静刚度是在点A的图7中的切线与曲线的斜率,通过这个定义,零预应力的VSM的静刚度变成160 n/mm,在4 kN的预应力下,其增加到510 n/mm。综上所述,根据VSM(图7所示)的准静态测试,当激活时,AVS的VSM的刚度增加了三附近的一个因素。
3.2。动刚度试验
使用动态试验机(图6)来确定VSM的动态刚度和相位响应。首先,底座向上移动,以便类似于0.54 kN的恒定自重(WO)。在这种载荷下,VSM的电缆是水平的。然后,伺服液压缸产生正弦信号。())具有恒定振幅(XO)和恒定频率(f)。同时,对平台上产生的载荷进行了测量。这种力是初始预载荷,WO(0.54 kN)加上一个振荡力,这是VSM对基底激励的响应。这种振动力由橡胶支座的弹性、VSM的预应力刚度(当预应力存在时)、橡胶支座的阻尼和索股的摩擦来确定。振荡力近似为正弦波形式(与位移(x)相同的频率,但具有相位差(omega;)。动态刚度(Kd)被发现为
VSM的动态刚度(Kd)和相位响应(Po)为在1~14 Hz频率范围内的小激励振幅(plusmn;0.1 mm)和大的激发振幅(plusmn;1 mm)。
在图8中示出了在1~14 Hz的频率范围内的非活动VSM(零预应力)的动态刚度,这表明固定激励振幅的动态刚度在给定范围内不会随激励频率的变化而变化。然而,动态刚度对激励振幅敏感,随着激励幅度的增大而下降。这一结果将被证明是由电缆的非线性行为引起的。这种趋势在图9中具有高预应力的主动VSM中更好地看到。
图8。非活动VSM预应力零的动态刚度,在不同的激励频率下测试:ε=:激发振幅=0.1 mm,预应力=0 kN和alpha;Orth-:激发振幅=1 mm,预应力=0 kN。
图9。在不同激励频率下测试的主动VSM,预应力4 kN的动态刚度:alpha;-:激发振幅=0.1毫米,预应力=4 kN和gamma;-:激励振幅=1毫米,预应力=4 kN。
如图9所示,有源VSM的动态刚度几乎与频率无关。同时,动刚度总是大于其相应的静刚度,并且随着激励振幅的增大而减小。在前一节中发现活性VSM的静刚度为510 n/mm。从图9中发现,在小的激励振幅(plusmn;0.1 mm)下的动态刚度约为750 n/mm,在大的激发振幅(plusmn;1 mm)下为约1250 n/mm。
动态刚度对激励振幅的依赖性是由索股之间的内摩擦引起的。为了解释这种效应,在图10中的大激发振幅(plusmn;1 mm)范围内,提出了所提出的有源VSM的准静态测试。如上文所解释的,动态刚度被发现几乎独立于激励频率。因此,准静态试验结果(图)。对于低频率的测试,7和10也适用于更高的频率。典型的加载循环的磁滞回线由虚线示出(图10)。点B1和B2(或C1,C2)对应于每个周期中的最大/最小力和相关位移。因此,动态刚度由通过B1和B2(或C1,C2)的线的斜率来确定。注意,这样的线的斜率通常大于加载/卸载曲线。其结果是,激励振幅为1 mm的有源VSM的动态刚度是线B1B2的斜率,因此,具有0.1 mm的激励振幅的有源VSM的动态刚度是线C1C2的斜率,其被视为大于B1B2的斜率。这种差异图形地解释了为什么动态刚度随着位移的减小而增加。
图10。线缆之间的摩擦引起的迟滞如何影响VSM的动态刚度:电缆预应力=4 kN和-----预期的磁滞回线。
图8和9表明,在给定范围内,固定激励振幅的动态刚度不随激励频率的变化而变化。换言之,在该频率范围内,动刚度与激励速度无关。这一事实表明,在动态刚度的粘性阻尼是可以忽略不计的。
全文共12118字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15606],资料为PDF文档或Word文档,PDF文档可免费转换为Word

