
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
商用车辆主动舱悬架控制
Willem-Jan Evers, Igo Besselink, Arjan Teerhuis, Albert van der Knaap and Henk Nijmeijer
摘要:汽车悬架领域正在发生变化。半主动和主动悬架开始成为汽车设计者的可行选择。考虑到它的潜力,商用车的悬架设计尤其令人感兴趣。一种重型卡车主动座舱悬架被认为是由四个理想的执行器与平行弹簧,一个作用于每一个角落的船舱。主要的问题是如何控制这种悬架,使其在直线行驶时获得最佳的舒适性,但在转弯、制动或加速时仍然遵循特定的补偿策略。该控制器采用模态输入输出解耦。每种模式都有一个单独的控制器包括:一个理想舒适的天棚部分;和一个事件的一部分用于姿态控制。仿真结果验证了该控制策略的有效性。结果表明,在不影响座舱姿态特性的前提下,可以大大提高驾驶员的舒适性。此外,与四分之一汽车分析中所知道的相反,它表明增加被动阻尼是非常可取的。
- 简介
近几十年来,半主动车辆悬架控制器设计的课题得到了广泛的关注,如[ 7 ],[ 15 ]。与主动悬架相比,具有半主动悬架的豪华轿车数量正在迅速增加。半主动悬架具有相对较低的功率消耗,优于现有的被动悬架。然而,性能远远小于主动悬架所能达到的性能,[ 4 ]。此外,转弯、刹车和加速时控制的可能性也更为有限。为什么半主动悬架有优先权?简单的答案是:耗电量。唯一的市场准备积极装置是基于液压或液压气动系统,需要更多的能量。现实世界中主动悬架在卡车中的应用是有限的。一个成功的实现是在[ 13 ]中提出的。实验台由液压牵引车半挂车(卷)驱动器上的所有拖车轴以及在拖拉机后桥。此外,在主加半主动阻尼器(轴)的拖拉机悬挂。其中一个结论是,半主动阻尼器只稍微提高驾驶员的舒适性和高总能耗(由于液压执行器)是不可行的商业设置。因此,在驾驶舒适性工作时,应着重于二级(客舱)悬挂。
在未来的电动执行器预计将是一个可行的解决方案,[ 10 ]。在[ 3 ]显示的积极优势与(机电)能源再生执行器显示。此外,有人认为,使用所谓的可变几何主动悬架将进一步降低能源需求。当将这种装置应用于商用车辆的二次悬挂时,所需能量可降低到更可接受的值。然而,如[ 1 ]所述,商业车辆悬挂控制领域,特别是二次悬挂的设计和控制,在文献中很少涉及。
有关次级悬浮物的控制的有关方法载于[ 11 ],[ 12 ]。在这里,提出了一个自我动力悬架的想法。结果表明,使用正确的驱动系统,可以获得相对较小的能量,从而大幅提高性能。在[ 5 ]中作了相关研究。它描述了一种主动悬架设计,其中机舱被悬挂在四个空气弹簧与电动执行器并联。利用优化后的状态变换,将系统转化为易于控制的滚距升沉系统。仿真结果表明,垂直、滚转和俯仰加速度分别降低了78%、65%和40%。这比预期的要多得多,例如见[ 4 ]。然而,根本不考虑姿态控制问题。此外,精确解耦还不清楚,似乎涉及。因此,仍然存在的问题是,如何兼顾舒适性和姿态行为来控制商用车的座舱。
本文提出了一种商用车主动舱悬挂控制策略,在不影响车辆在极端机动时俯仰和侧倾的情况下,大大提高了驾驶员的舒适性。悬架由4个理想化的10赫兹带宽执行器在每个舱室的角落下面。通过输入输出解耦线性化的运动方程和有源控制器约束手段的引入,系统可以转化为三个解耦的单输入单输出(SISO)环。这些循环中的每一个分别被控制。使用经过验证的拖拉机半挂车仿真模型对控制器进行了评估。控制主动悬架可以显著提高驾驶员的舒适度和姿态特性。此外,还说明了增加被动阻尼的意义。
论文的组织如下。首先,推导了适用于控制器设计的座舱模型。接下来,输入输出解耦处理,其次是每个SISO回路的控制器设计。最后,使用经过验证的卡车半挂车模型,对所提出的控制器进行了广泛的试验评估。
- 控制器设计的座舱模型
本文的目的是开发一种主动舱悬挂控制器。Hereto,采用基于模型的设计。由于随后的控制设计,一个有限的复杂性模型,其中包括主要舱室动态,是可取的。在本节中考虑了这种模型的推导。
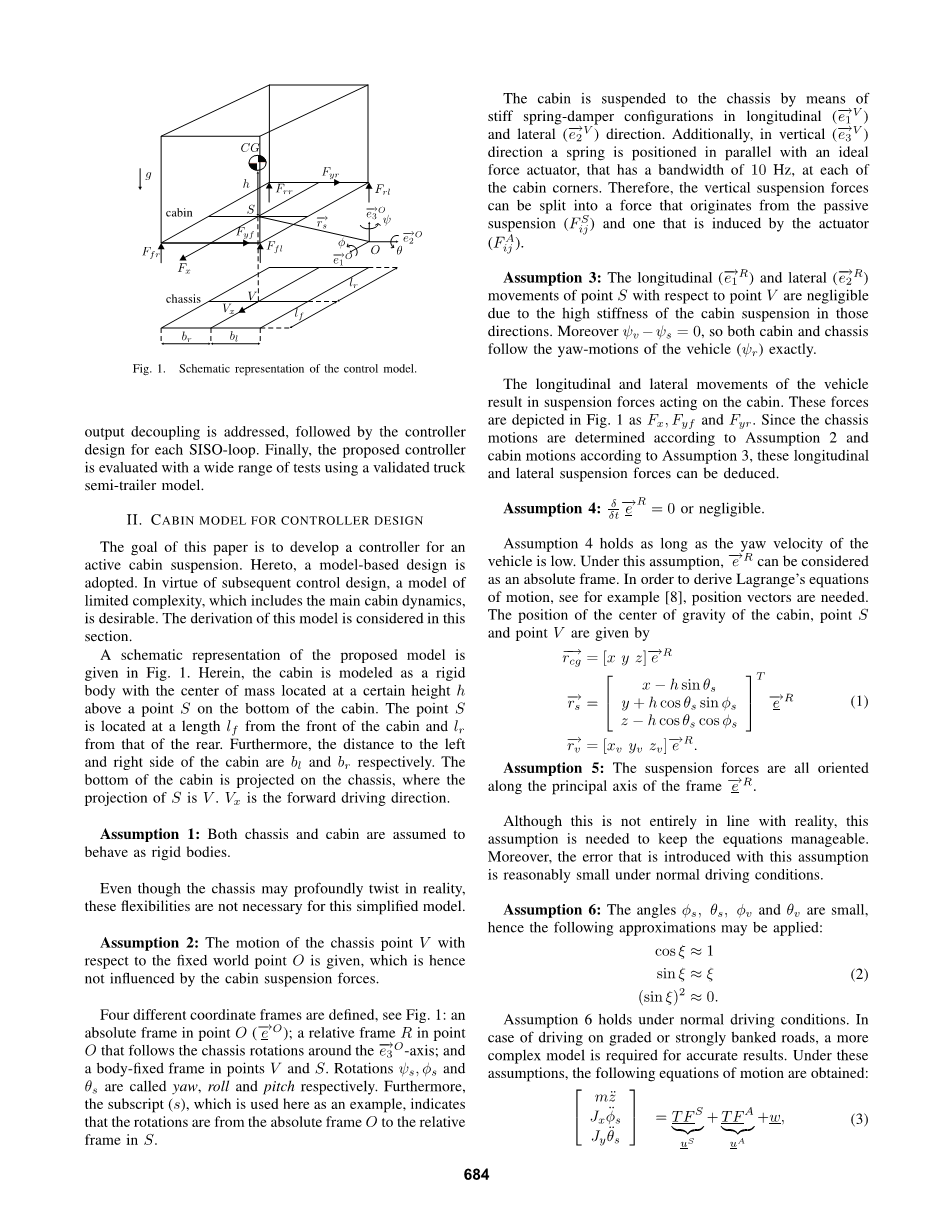
图1给出了该模型的示意图。这里,舱被建模为一个刚体,其质量中心位于某个高度h以上,在船舱底部的s处。点S位于一个长度从客舱的前部和从后面的LR。此外,机舱左侧和右侧的距离分别为BL和BR。船舱的底部投射在底盘上,S的投影是v。VX是向前行驶的方向。
假设1:底盘和船舱都假定为刚体。
尽管底盘可能极大地扭曲现实,这些灵活性对于简化模型是没有必要的。
假设2:底盘点V相对于固定的世界点O的运动,因此不受舱外悬挂力的影响。
定义了四个不同的坐标系,见图1:在O点的绝对坐标系();相对帧R O点如下的底盘转动邻轴;在V和S的旋转psi;的分体固定架,phi;和theta;S称为偏航,分别侧倾和俯仰。此外,以这里所用的下标为例,说明S.中的旋转是从绝对框架O到相对框架。
船舱是悬浮在底盘的刚性弹簧阻尼器结构在纵向的手段()和横向()方向。此外,在垂直()方向安装有弹簧并联了一个理想的力致动器,具有10赫兹的带宽,每个船舱的角落。因此,垂直悬挂的力量可分为动力来源于被动悬架()和一个由致动器致()。
假设3:纵向()和横向())运动的点对点V可以忽略不计,由于在这些方向的驾驶室悬架的刚度高。此外psi;Vminus;psi; S = 0,所以两舱和底盘跟随车辆的横摆运动(psi;r)到底。
车辆的纵向和横向运动导致悬挂力作用于船舱。这些力量是如图1所示为,和。由于底盘运动是根据假设2和船舱运动,根据假设3,这些纵向和横向的悬浮力可以推断出来。
假设4: = 0或可忽略不计。
假设4保持不变,只要车辆的横摆速度很低。在这种假设下,minus;→E R可以被视为一个绝对的框架。为了得到拉格朗日的运动方程,例如见[ 8 ],需要位置矢量。船舱重心、点S和点V的位置由
(1)
.
假设5:悬浮力都是面向沿框架主轴.
虽然这与现实不完全一致,但仍需要这种假设来保持方程的可管理性。此外,这种假设引入的误差在正常行驶条件下是相当小的。
假设6:phi;的角度,theta;,phi;V和theta;V很小,因此可以采用以下近似:
cosxi;asymp;1
sinxi;asymp;xi; (2)
asymp;0
假设6在正常驾驶条件下。在分级或强堆积的道路上行驶时,需要一个更复杂的模型来获得准确的结果。在这些假设下,得到下列运动方程:
(3)
=
=
(4)
这里,是扰动向量,是一个包含执行器力的向量,包含被动悬挂元件的力。
采用带刚度的线性弹簧和带有阻尼常数的线性阻尼器作为被动悬架元件,模态被动悬架输入。
(5)
- (6)
(7)
- 输入输出解耦
在本节中,提出了一种根据运动方程确定适当的控制策略的方法,如(3)中给出的那样。从一个关键的观察(7),升沉(Z)、螺距(theta;S)乐(phi;S)动力学从悬挂元件的耦合。此外,每一个驱动力影响所有这些模式,见(4)。此外,有四个控制输入,只有三个输出,因此系统过度驱动。为了处理相互作用和过度驱动,对输入输出解耦进行了研究。
假设7:绝对定位(theta;小屋,phi;,psi;S)不能精确测量或估计。因此,这些角度无法控制。因此,这些角度在需要时被假定为零。
从(3),已知模态致动器输入的矢量是由
(8)
由于t不是正方形矩阵,所以f不能唯一地确定给定的U。寻找一个独特的变换的方法之一是寻找额外的约束。为此目的,可动态激发选择: (9)
在实践中,假设1是不成立的,因为舱底在某些方面是灵活的。如果执行机构被用来扭曲舱底,能量被浪费,客舱的疲劳问题可能是结果,因此必须加以预防。结合(3)、(4)和(9)假设7给出
= (10)
这是一个可逆变换,如(,,,)gt; 0。另一种方法,找到一个独特的转换是通过使用所谓的伪逆(或Moore Penrose逆),见[ 6 ]。对于我们的系统,伪逆在最小二乘意义下是最优的。
下一步是克服由被动悬挂力引起的相互作用,即(7)非对角项所产生的力。只有与弹簧有关的术语得到补偿,因为与阻尼器有关的术语只是耗散能量。因此,对非对角阻尼项的补偿将不具有能量效率。其结果是,模态致动器输入成为
用模态控制器输入向量
扰动近似为
H如图1和Xcirc;uml;V,Ycirc;uml;V的纵向和横向的底盘分别过滤685 10赫兹的一阶低通滤波器的加速度。因此,解耦运动方程成为
与ǫ误差项,可以忽略不计。利用这些假设和方程,将投入产出行为解耦。在下一节中,设计了每个解耦循环的控制策略。
- 控制策略
通过上一节所述的输入-输出解耦,导出了由三个独立的SISO回路组成的系统。控制目标区分两种不同的干扰。在手上,有司机引起的干扰,例如刹车时,加速或转弯。在这种情况下,客舱姿态行为应该模仿底盘运动,以达到最佳的操控感。请注意,这是(很大一部分)通过补偿项tilde;在W(13)。另一方面,也有来自公路的干扰。这些需要在一定程度上加以抑制,这取决于可用的工作空间和干扰的强度。这种情况下的目标是最小化ISO加权舱内加速度。这反映在乘坐舒适指数中,它包括ISO频率加权加速度之和[ 9 ],
RCI= (17)
对于振动控制标准的控制方法,这是最佳的均方根悬架动挠度和悬挂质量加速度-一个单一的悬挂质量与白噪声扰动速度,[ 7 ],是与天棚阻尼组合刚度的使用。在实际应用中,额外的低频繁水准(整体动作)往往是可取的,例如上山时[ 14 ]。因此,控制器是由
(18)
, ,, , , , ,,为控制器参数。
备注8:在对称和非对称路面输入可以考虑在驾驶车辆时在实践中是不相关的干扰,Z˙C和C相关的˙theta;。此外,所有的干扰(也phi;˙C)将过滤白噪声。因此,(18)中给出的控制器结构将不是最优的。然而,它被认为是更先进的控制器设计研究的良好起点。
- 评价
为了评估所提出的控制器,验证(44自由度)半拖车半挂车模型如[ 2 ]所使用。该模型是在Matlab/SimMechanics实施,这是MATLAB的SIMULINK系统工具箱。车辆模型的舱内悬挂按照以下方式进行修改:舱内和底盘之间的前滚稳定器被拆除,四个执行器置于舱内。这些致动器被建模为理想的力致动器,作用于机舱和底盘,有限的带宽为10赫兹,这是仿照使用一阶低通滤波器。此外,还评估了两种方案来研究被动阻尼的重要性。首先,被动阻尼(DS)被降为零。其次,它减少到大约60%的被动钢弹簧悬架设计。相关的机舱参数见表一。
控制器参数是手动调节的结果。一个相当高的被动弹簧刚度被选中,因为它是可取的,以避免碰撞停止,而不需要非常强的被动阻尼器,恶化了高频率的舒适性。天棚阻尼项调整到正常的驾驶条件下获得足够的舒适性改善。此外,被动阻尼被选择,使得碰撞停止不会恶化舒适性,当穿越一个对称的道路颠簸-如后面描述的-在20公里/小时。此外,积分器增益被选择,使客舱水平在5秒以下。
- 稳态I/O测试
首先,验证了输入输出解耦的质量。在模态控制输入中加入Hereto阶梯形信号,并对舱内响应进行评估。在时间t=10,t=15和t=20秒时,应用u的第一、第二和第三元素中的一个步骤。当车辆处于静止状态时,在图2中给出了小输入(a)和较大输入(b)的响应。去耦对于滚转和俯仰力矩是非常精确的,因为每个输入只影响相关状态分量。然而,对于垂直力输入,U的第一个元素,少量的交互仍然可见。当比较小和大输入的结果时,可以看到图2的数量。静止时的输入输出评估(DS = 4000):客舱垂直加速度(顶部);侧倾加速度(中);俯仰加速度(底部)。相对较小的输入步骤(a),相对较大的输入步骤(b)。
相互作用几乎保持不变。因此,由于该方法在整个工作范围看来是有效的,结果令人满意。
- 对称碰撞试验
第二个模拟试验由一个对称的梯形凸起(左右轮具有相同的道路轮廓)驱动,等速行驶20公里/小时。颠簸的长度为1.4米,高度为0.06米。上下斜坡长度为每0.6米。控制的目标是避免颠簸停止,同时尽量减少俯仰和升沉加速度。然而,即使凹凸有一个现实的形状,凹凸停止不能避免不增加被动阻尼或增加刚度不理想的高值。图3和图4分别给出了使用DS=4000 ns / m的升沉和俯仰响应。虚线给出了一个传统的(软)空气弹簧悬架的响应,实线给出了建议的主动悬架响应。
总体来说,可以看出,显著地降低了主动悬架的加速度。被动空气舱的乘坐舒适指数(舒适度)增加了32%。然而,也有一些小尖峰可见-在5.2秒和5.4秒-在那里停止碰撞接触。因此,如果增加了最低要求,例如,这种颠簸需要在30公里/小时,另外需要额外的被动阻尼,以避免碰撞停止。另外,依赖于中风的阻尼是值得研究的,例如见[ 15 ]。然而,这超出了本文的范围。
C. 沥青的舒适性评价
对于舒适
全文共8252字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15495],资料为PDF文档或Word文档,PDF文档可免费转换为Word

