
英语原文共 6 页
钢丝绳驱动调平装置的控制调整
摘要——为了解决解决装卸时高精度、高成本有效载荷的调平问题,一种绳驱动式自动调平装置被研究出来,并且一种神经模糊控制控制器被提出。在简要介绍了该装置的结构特点和神经模糊控制的基本原理后,建立了神经模糊控制器的结构,以两个角度传感器测得的两个对角倾角作为输入变量,两个直线运动单元位置的变化是控制变量。神经模糊控制器是一种混合算法,它是最小二乘估计(LSE)法和反向传播(BP)算法的结合,其规则是根据人的调节经验构造的。实验结果表明,所提出的神经模糊控制器能够实现高精度、短调节时间的控制目标,并易于应用于实际装置中。
一:介绍
在许多领域,如工业应用等,高精度和昂贵的有效载荷(如卫星,飞机、涡轮发动机)通常需要装载卸载。这种昂贵的有效载荷不能承受点对点或点对面接触地面或组装平台。此外,它们的质心通常偏离几何中心。这将导致整个过程中的倾斜和侧向力,这通常会导致有效载荷变形、损坏,甚至完全破坏。
为了避免这些陷阱,各种方法和机制已经被研究和应用,例如,链路电缆并联,并联平台,混合并行平台(链接结构)和电缆(结构),和重量补偿机制等。从理论上讲,这些调整方法都可以用于水平调整。然而,链路并联平台不可避免地会增加系统的重量,不易满足精度要求和实现自调节;钢丝绳平行平台难以建模和控制,而且需要较大的空间来固定钢丝绳并增大调平机构的尺寸;这些内在缺陷在某种程度上也适用于混合并行平台;重量补偿法精确、平稳、操作方便,但往往只能实现一维调节,同时在调节大、重有效载荷时需要较大的匹配块和较大的结构尺寸。虽然绳基技术存在上述缺陷,但相应的并联装置工作空间大,拉力大,调节速度快。目前,研究活动主要集中在工作空间分析、有效载荷的中心位置和位置、运动学特性和动力学特性等方面。然而,对于有效载荷结合面的调平控制和钢丝绳拉力的平衡问题,目前尚无研究报道。为了实现高精度、高成本的有效载荷的调平控制,在实际应用中普遍采用四绳手动调平装置。这些手动装置的缺点是劳动强度大、效率低、精度低、安全隐患大。如何改善这种状况已成为一个亟待解决的难题。
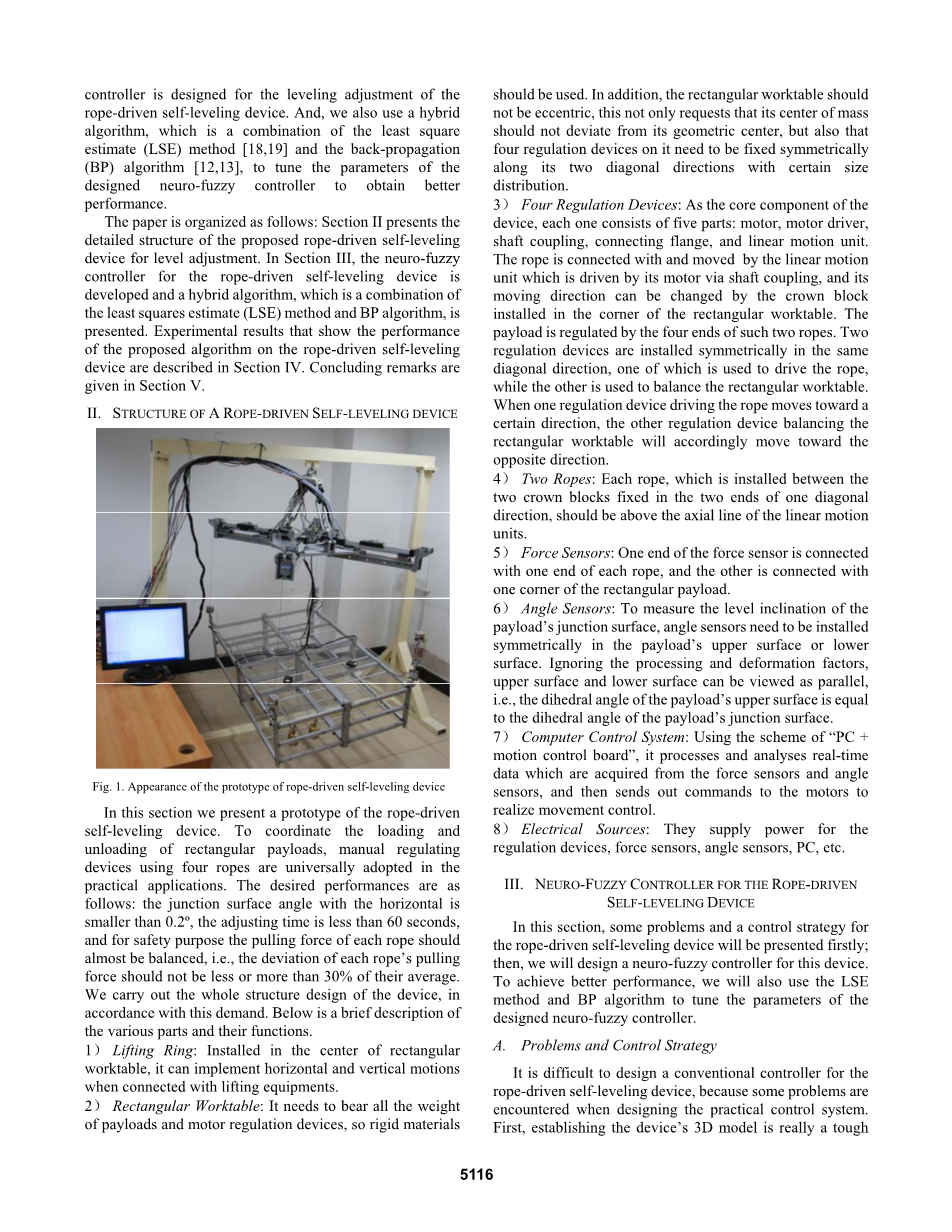
近年来,在分析上述方法和机构的优缺点的基础上,同时结合目前广泛使用的手动调节装置,研制了一种绳传动自调平装置,其结构和配置如图所示。1.装置的二维模型被建立,但对于三维有效载荷,由于小节给出的原因,很难获得准确的三维模型。2.绳驱调平装置常规控制器的设计是一项复杂而艰巨的工作。模糊逻辑控制已被证明是一种实用的替代方法,可用于各种难以用经典方法解决的具有挑战性的控制应用,它可以充分地将人类的知识或经验融入系统设计中。因此,使用模糊逻辑控制器来调节有效载荷可能是一个很好的选择。
然而,传统的模糊逻辑控制器设计方法面临着将人的经验转化为规则库、调整隶属函数参数以使性能指标最大化(最小化)的困难。为了克服这些缺点,开发了几种方法,其中一种是模糊神经网络控制器(FNNC)或神经模糊控制器。神经模糊控制器结合了模糊系统和神经网络的优点,在许多实际应用中得到了广泛的应用。为此,本文设计了一种神经模糊控制器,用于钢丝绳自调平装置的调平。同时,采用最小二乘估计(LSE)和反向传播(BP)相结合的混合算法,对所设计的神经模糊控制器进行参数整定,以获得较好的性能。
本文的组织结构如下:第二节介绍了用于调平的钢丝绳驱动调平装置的详细结构。在第三节中,开发了绳驱动自调平装置的神经模糊控制器,提出了一种结合最小二乘估计(LSE)和BP算法的混合算法。有关所提出的算法在绳驱自流平装置上性能表现的实验结果在第四节中进行了描述。结束语在第五节给出。
二:绳驱动自流平装置的结构
在本节中,我们介绍了一个绳驱动自调平装置的原型。为了协调矩形有效载荷的装卸,在实际应用中普遍采用四绳手动调节装置。所需性能如下:与水平面的结合面角小于0.2度,调整时间小于60秒,为安全起见,每根绳的拉力应几乎平衡,即每根绳的拉力偏差不应小于或大于其平均值的30%。我们根据这一需求进行了整个装置的结构设计。以下是各部分及其功能的简要说明。
- 吊环:安装在矩形工作台中心,与起重设备连接时可实现水平和垂直运动。
- 矩形工作台:它需要承受所有有效载荷和电机调节装置的重量,因此应使用刚性材料。另外,矩形工作台不应偏心,这不仅要求其质心不应偏离其几何中心,而且要求其上的四个调节装置沿其两个对角方向对称固定,并具有一定的尺寸分布。
- 四种调节装置:作为装置的核心部件,每种装置由五部分组成:电机、电机驱动器、联轴器、连接法兰、直线运动单元。绳索与直线运动装置连接,直线运动装置由其电机通过联轴器驱动,其运动方向可通过安装在矩形工作台转角处的天车改变。有效载荷由这两条绳子的四个末端调节。两个调节装置在同一对角线方向对称安装,一个用于驱动绳索,另一个用于平衡矩形工作台。当一个驱动绳索的调节装置向某个方向移动时,另一个调节装置平衡矩形工作台将相应地朝相反的方向移动。
- 两根绳索:每根绳索安装在固定在一个对角线方向两端的两个天车之间,应在直线运动装置的轴线上方。
- 力传感器:力传感器的一端与每根绳子的一端相连,另一端与矩形有效载荷的一角相连。
- 角度传感器:为了测量有效载荷结合面的水平倾角,需要在有效载荷的上表面或下表面对称安装角度传感器。忽略加工和变形因素,可以将上下表面视为平行,即有效载荷上表面的二面角等于有效载荷结合面的二面角。
- 计算机控制系统:采用“PC 运动控制板”方案,对力传感器和角度传感器采集的实时数据进行处理和分析,然后向电机发出指令,实现运动控制。
- 电源:为调节装置、力传感器、角度传感器、PC等提供电源。
Ⅲ绳传动式自动调平装置的神经模糊控制器
本节首先介绍了绳传动自调平装置存在的问题和控制策略,然后设计了一种神经模糊控制器。为了获得更好的性能,我们还将使用LSE方法和BP算法来调整所设计的神经模糊控制器的参数。
- 问题与控制策略
由于在实际控制系统设计中遇到了一些问题,传统的绳驱调平装置控制器难以设计。首先,建立装置的三维模型是一个很难解决的问题,要得到绳长与载荷结合面二面角之间的数值关系并不容易。虽然提出了一个实际的装置二维模型,并能得到其解析解,但由于其复杂程度,不能直接有效地应用。更糟糕的是,在建模中需要用到的有效载荷的精确重量和精确的质心位置通常是未知的。此外,在实际应用中,整体物理结构引起的耦合效应是存在的,很难减弱。这些问题使得传统的基于精确数学模型的控制器设计难以实现调平。
图2给出了有效载荷上表面(OAB)和水平表面()之间的空间关系。两个精度相同的角度传感器沿两个对角方向对称安装,可以自动检测其所在直线与水平表面之间的坡度,即角度。有效载荷上表面的ns(OA和OB)。这里,我们将和分别定义为OA和OB对水平面的投影。因此,来自两个角度传感器测量的角度,表示为和,是对角线(OA和OB)与其各自水平投影(和)之间的角度。假设是有效载荷上表面和水平表面之间的二面角,(在实际系统中为67.3802°)是两条对角线(OA和OB)之间的角。假设=1、=1由下式得出
= (1)
我们可以得到
=) (2)
=) (3)
= (4)
从(4)可以推断,只要和,对角线(OA和OB)与其各自水平投影(和)之间的角度都可以调整为0°,由两条相交直线(OA和OB)设置的平面(OAB),即有效载荷的接合面,将大致水平。为了实现这一目标,我们可以通过改变直线电机单元的位置来调节绳索,即和。
- 神经模糊控制器的设计
从以上讨论可以看出,绳驱调平装置的控制器应具有两个输入和两个输出。输入变量是从两个角度传感器测量的两个对角线倾斜的角度,,输出变量是用于驱动两条绳索的两个线性运动单元的位置变化
绳驱自流平装置的神经模糊控制器结构如图3所示。这是一个二输入二输出的神经模糊网络,有四层和25条规则。控制器的第一层是输入层。第二层是成员功能层。该层中的每个节点都执行模糊集的功能。第三层是规则层。该层对应于模糊逻辑控制器中的推理过程。在这一层中,每个节点对应于规则库中的一个模糊规则。最后,第四层是输出层。该层用于实现模糊逻辑控制器的去模糊过程。
假设规则库中有m(m=25)个规则,每个规则的格式如下
规则 k: 如果 是 且 是 ,
然后 是 且 是
其中 k=1,2,hellip;,M,(z=x,y)是后续加权因子并且是高斯模糊集NB,NS,ZR,PS或者PB,并且
=exp (5)
在神经模糊控制器中应用CRISP输入后,通过单子模糊器和推理过程,可以从第三层得到第k条规则的射击强度。
= (6)
然后,利用加权平均去模糊方法,得到神经模糊控制器的输出。
=,当z=x,y (7)
层1 层2 层3
表3神经模糊控制器的结构
C. 神经模糊控制器的训练
为了获得更好的性能和满足绳传动自调平装置的精度要求,本小节将采用LSE方法和BP算法对所设计的神经模糊控制器进行参数整定。在这里,我们使用LSE方法,在开始的几个步骤中获得后续参数的初始值,直到RMSE曲线不会发生明显变化;然后,我们开始BP训练过程,直到获得满意的性能。给定n个输入输出训练数据,,hellip;,,应用BP算法调整神经模糊控制器的参数,使以下平方误差函数最小化:
= (8)
= (9)
== (10)
现在,让我们首先介绍神经模糊控制器参数的BP更新规则。
- 加权因子的BP更新规则
=﹣
=﹣ (11)
- 高斯FSS均值的BP更新规则
=﹣
=﹣ (12)
- 高斯FSS宽度的BP更新规则
=﹣
=﹣ (13)
= ,z =x,y (14)
= (15)
where =
同样地,也可以计算,,
BP算法对初始值敏感。而且,前因参数的合理初值容易设定,后续参数的合理初值难以确定。因此,在本研究中,我们利用LSE方法得到后续参数的初始值,因为神经模糊控制器的输出与后续权重因子呈线性关系。
从(7)
==, (16)
Where =, (17)
=. (18)
培训数据集导入神经模糊控制器后,向量,,可以被得出
表示Q==,
=,z=x,y
为了最小化=2,使用伪逆,的LES可以写成
= (19)
由于矩阵求逆的计算量大,且可能是奇异的,因此需要采用下面给出的递推公式来计算W的lse。
=+ (20)
=- (21)
= (22)
当t=0,1,,N﹣1,是协方差矩阵,并且等于最小二乘估计。初始条件是=0和=,其中是尺寸mtimes;m的单位矩阵,是一个更大的正数
在上述讨论的基础上,将LSE方法和BP算法相结合的混合算法应用于绳传动自调平装置的神经模糊控制器的整定。首先采用LSE方法对神经模糊控制器进行训练,当RMSE曲线没有明显变化后,开始BP训练过程,直到达到满意的效果。
四:实验结果
在实验中,我们使用492对经验数据对训练神经模糊控制器。NB、NS、ZR 、PS、PB关于theta;xtheta;y的初始隶属函数如图4所示(黑色虚线)。并且,设置为零。图5展示了训练过程中的RMSE(均方根误差)曲线。前5步采用LSE方法,后20步采用BP算法,其中学习率=0.1; =0.001; =0.0001。
经过培训后,和的规则表分别如表I和表II所示。并且,Nb、Ns、ZR、PS和PB 关于的训练成员函数也示于图4(实线红线)和神经模糊控制器的控制面如图6(a)-(b)所示。然后,将训练后的神经模糊控制器应用于钢丝绳自调平装置的调平调整。图7给出了两个实验中神经模糊控制器的控制结果,其中和具有不同的初始角度(3.39°/-1.85°和5.61°/4.05°),分别具有相反的符号和相同的符号。从表7可以看出,当和调整到很小的值时,结合面角度的精度几乎可以接近0°,调整时间远小于60秒,即经过训练的神经模糊控制器可以实现绳驱自调平装置的控制目标调平。
五:结论
本文提出了一种钢丝绳驱动调平装置,并根据人的调平经验,设计了一种神经模糊控制器。采用最小二乘估计(LSE)和反向传播(BP)相结合的混合算法对神经模糊控制器进行参数整定,以获得较好的性能。实验结果表明,神经模糊控制器能够实现绳传动自调平装置的调平,并易于应用于实际装置中。本文还没有考虑拉力的平衡控制。如何实现调平与拉力平衡的同步控制是一个重大挑战,也是今后工作的重点。
参考文献
[1] K. Etemadi-Zanganeh and J. Angeles, “Real-time direct kinematics of general six-degree-of-freedom parallel manipulators with minimum sensor data,” Journal of robotic systems, vol. 12, pp. 833–844, 1995.
[2] A.
资料编号:[5181]

