
英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
卷扬机上钢丝绳缠绕(退卷)过程的动力学研究
列宾比科 米尔扬纳菲利波维奇 亚历山大拉奇
摘要:本文的目的是对卷扬机缠绕(退卷)动态过程的非线性和脉冲性质的现象进行分析和定义。这个过程的特点是突然和描述了绳缠绕(展开)过程的突然跳跃的动态变量。因此,我们把这个过程命名为:在卷扬机上的一排径向多层绕组(解卷)中绳跳跃非线性的过程。由于我们更容易理解这种缠绕(解卷)过程的跳跃性概念,我们首先在理想化的环境下分析了这个概念。当卷扬机的转速恒定时,为了说明在实际工作条件下(当它是复杂系统的一部分)时,这个过程更为复杂,我们在执行绳索悬挂RSPCR(刚性绳索S型悬索并联机器人)系统的任务中分析了它,该系统在3D空间中携带相机。卷扬机卷绕(解卷)在绞盘上的跳跃过程的定义更是在RSCPR系统中表达,因为在这种情况下,三个子系统在绳索缠绕(展开)之间有很强的耦合。这些结果已经通过实际的RSCPR系统的模拟实验证明。这一结果具有更广泛的意义,因为绳索缠绕(展开)过程可以是任何复杂的系统被绳索悬挂的一个组成部分。为了验证本文所给出的结果,我们开发了两种新的程序包:JavpSouth-OW和RojpWiel-RSCPR。我们已经通过一个由电动机和卷扬机组成的系统的实验结果证实了这个理论概念。
关键词:钢丝绳卷绕(解卷)动力学 卷扬机 脉冲性质 悬索并联机器人
1.简介
缆索悬挂并联机器人(CPR系统)在80年代进入了机器人世界,当时在美国和日本提出了起重机、并联机械手和类似的缆索悬挂机械的第一个概念。
第一个缆绳悬挂机器人之一是NIST机器人起重机,它是由阿尔贝斯等人创建的。六自由度的机器人起重机的尖端在3D空间中被完全控制。除此之外,NIST机器人是最流行的CPR系统之一,它是一种由川村等人进行了分析的非常快的隼机器人。
CPR系统的设计非常复杂,因此对其特点进行分析是非常重要的。我们必须分析这些系统的工作和奇异空间。在由巴雷特和高斯林编写的论文中,作者处理了CPR系统的动态控制,并以此方式实现更大的工作空间,即更小的奇异空间,并且这些系统可以执行更高要求的任务。菲利波维奇等人分析了CPR系统的边界位置,即这些系统的奇异性的出现。
设计和分析这些系统的一个非常重要的方面是对它们的运动学和动力学有很好的了解,以及对绳索中力的分布的了解。这样才能处理这些系统的运动学问题,并对影响他们行为的力量进行分析。与以前的文献相比,本文分析了CPR系统的动力学。
由于所有这些问题,CPR系统是非常复杂的控制,因为有必要保持电缆松散足够,同时充分紧张。一些处理CPR系统的论文由OH等人提出。
菲利波维奇等人提出了两种不同的CPR系统的建模原理,而我们提出了它们的比较分析。
本文介绍了卷扬机上一排径向多层绕组(开卷)的绳跳非线性过程。我们通过整个论文来处理这个过程,并且为了更容易的写作,我们将使用较短的术语:绳索跳跃缠绕(展开)过程。绳跳跃缠绕(解卷)过程的动力学是一个极其非线性和跳跃的过程,它明显反映了CPR系统响应的整体动力学。应该注意的是,CPR系统通常有多个子系统用于绳索缠绕(解卷),这些子系统相互强耦合。这一事实支持需要对这一重要现象进行深入和全面的分析。
为了测试和分析本文提出的概念,我们设计了两个原始程序包:JAMPWORK-OW和JAMPWORK-RSCPR。
在本文的第二部分中,我们介绍了一个绞车绳跳动卷绕(退卷)过程动力学的基本理论原理。在本文的第三部分中,我们提出了程序包JangpWang-OW。为了更容易理解被分析的主题,在本文的第四部分中,当绞车的旋转速度恒定时,我们对卷绕(展开)过程在绞车运动的理想化条件下进行了仿真分析。在本文的第五部分中,我们提出了程序包JUMPWSTRAN-RSCPR。在第六节中,我们展示了所定义的数学概念在RSCPR系统的复杂运动中的应用,该系统包括三个子系统:马达、齿轮和卷扬机。充分的模拟实验支持了这一分析。然后,在第七节中,我们对一个系统的定义理论概念进行实验分析:马达、齿轮和卷扬机。在本文的最后部分,我们给出了我们的结论和观察结果。
- 基本理论原则
本文分析了卷扬机绳缠绕(退卷)过程的动力学特性。这个过程是非常复杂的,其运动的动力学影响机构的其余部分的运动动力学。本文以CPR系统为例,分析了绳缠绕(解卷)过程的动力学特性。到目前为止,我们已经提出了两个新的CPR系统的结构:由菲奥普维奇等人开发的RSCPR系统和CPR系统,该系统由菲奥普维奇等人定义。到目前为止,在现有的世界文献中,在我们之前提到的论文中,绳跳跃缠绕(解卷)过程的动力学没有建模并且包含在系统的完整数学模型中。这种现象可能属于不同类别的机制,而不仅仅是CPR系统。因此,这项研究的重要性更为广泛,因为它包括所有由绳索悬挂(驱动)的机构。
在本文中,我们开发了一个运动学和动力学模型的绳跳跃绕缠绕(解卷)过程。我们还分析了绳索跳跃缠绕(解卷)过程对其余机构的响应的影响。在本文中,我们选择了一个特定的体系结构——RSCPR系统,由菲奥普维奇等人定义。RSCPR系统由三个电机绞车子系统组成。这三个子系统中的每一个缠绕(解卷)其相应的绳索。这三条绳索与相机相连,它们在3D空间中引导它。每个电机驱动用于绳索跳跃卷绕(解卷)过程的绞盘。卷扬机示意性地表示在图1中。
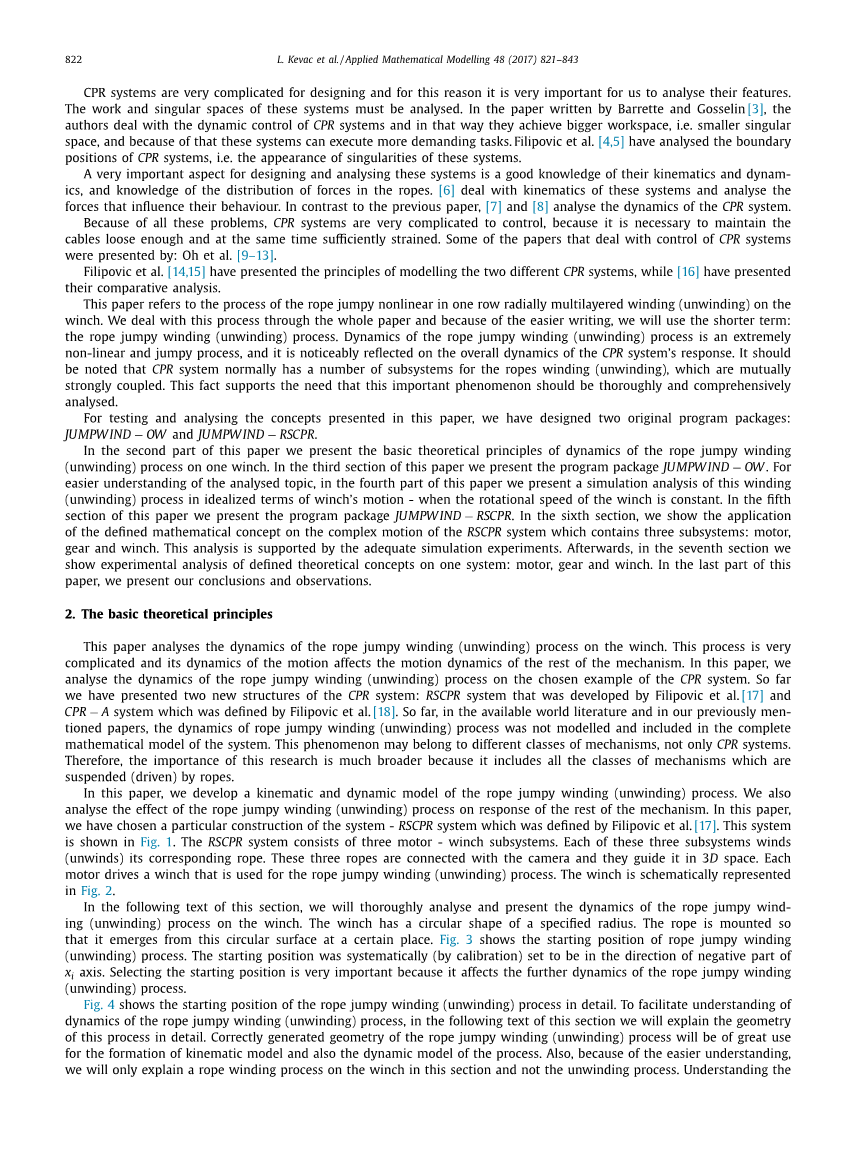
在下面的章节中,我们将深入分析和介绍卷扬机上绳跳动(开卷)过程的动力学。卷扬机具有指定半径的圆形形状。绳索被安装来让它在某个地方从这个圆形表面出现。图2示出绳索跳跃绕组(解卷)过程的起始位置。起始位置系统(被标定)将对齐轴负方向的部分。选择起始位置是非常重要的,因为它影响绳索跳跃缠绕(解卷)过程的进一步动力学。
图3详细地示出了绳跳跃缠绕(展开)过程的起始位置。为了便于理解绳跳跃缠绕(解卷)过程的动力学,在本节的以下文本中,我们将详细解释该过程的几何结构。钢丝绳绕线(解卷)过程的正确生成将对运动模型的形成和过程的动态模型有很大的帮助。此外,为了更容易理解,我们将只解释绳缠绕过程在绞车上的这部分过程,而不是退绕过程。理解卷扬机上的绳索缠绕过程来引导读者得出退绕过程发生的现象与颠倒顺序相同的现象。
图1.卷扬机上绳跳动缠绕(解卷)过程 图2.系统的起始位置
图2示出了系统的起始位置,该系统由绞盘(半径Ri0=13.6 mm)组成,该绞盘与绳索连接(它从卷扬机中出来,它是D=0.8毫米厚)。从另一侧,绳索越过较小的滑轮(半径R=9毫米),并且该滑轮位于摄像机工作空间的上角之一。在该滑轮的后面,绳索与相机连续连接,作为负载并收紧绳索。重要的是要注意,绳子不是缠绕在这个滑轮上,而是在它上面移动。
E点代表绳索从绞车中出现的地方。在系统的起始位置为绳跳动的绕组(解卷)的过程,这一点是放在席轴负部分。E点有一个固定的位置来比较卷扬机,不管卷扬机的运动。我们推测的角度提出了theta;位移之间的线OIE和负轴的一部分,席角的值在初始时刻:
(1)
与E点不同,我们定义了点T,它与绞车相比不断地改变其位置。这一点给出了绳索接触(或在某些时期切线)绞车或绳索缠绕到那个时刻的位置。在初始时刻,点E和T重叠,并且可以在图2和3中看到。绞车上的绳索跳跃缠绕(展开)过程的整个系统被构造成可以在如图2所示的平面中呈现。该绞车中心点OI(XIO = 0,YIO= 0,)这里XI,YI为坐标系定位。滑轮中心位于C点(XIC=A,YIC=B),其中XI1, yI1坐标系也被定位。距离A=45 mm表示绞车和滑轮轴线之间的水平距离,而距离B=524 mm呈现这两个轴线之间的垂直距离。卷扬机和滑轮定位为了使gamma;I>0用于摄像机在其工作空间中的任何位置。在卷绕过程的初始位置(见图.2和3)角gamma;i最大值为gamma;iMAX=2.36=0.04116 rad。角度gamma;i是这样确定的:首先,我们从半径为r+d的圆上的点T和中心点C上建立一条切线,这样我们就确定了点G。之后,我们做了一条与直线TG平行的线,它有一个起点,点OI。然后确定这条线与Y轴正部分之间的夹角,这个角度表示角度gamma;i。
我们假定角度theta;i在理想化的方式下改变,即绞车以恒定的旋转速度旋转,Xi为常数。这些条件仅仅是理想化的理论假设,这代表了比现实的条件更简单的条件,当系统需要电机的协调运动以实现相机的期望轨迹时。在现实中电动机的旋转(角)速度可以是非常可变的。这意味着实际情况将比我们在本文的部分中所分析的要苛刻得多。我们假设了绞车运动的这些理想条件,以便我们可以更容易地解释绳索跳跃缠绕(解卷)过程的动态现象给读者。我们假定绳索的张力总是通过中心索轴线-线Sm的方向作用。在任何时刻,确定拉力作用在绞车上的半径是很重要的。在初始情况下,半径表示距离OiAR,从图2可以看出半径具有以下值:
(2)
点A被设置成使得在任何时刻它被定位在绕角度T旋转的直线上,该角度与角度gamma;i(参见图3)有关。这条线与Sm的交点代表线A.和OiT之间的点线(OiE也在这种情况下),表示角度i。在初始位置,这个角具有最大值。点AR被定位在线Sm和OR之间的交点处。点B定位在线Sm和线之间的交点处,该点在C点开始并且与线Sm距离AB,我们已经标记为距离LWI提出了动态变化在绳索跳跃绕组(展开)过程。这种距离有其自身的变化动力学,它显著地影响系统的动态响应。
图3.系统开始位置-绞车放大 图4.系统的位置0<theta;i<gamma;i
在图4和5中,我们提出了满足以下条件的绞车的旋转角度theta;i的机构的位置:
(3)
此外,图4示出了整个机构,而在图5中,我们只展示带有绞车的部件。在这种情况下,绕组的半径(展开)是
(4)
点AR仍然是线Sm和OR的交叉点,而点A位于线Sm和某线的交点处,该线与线平行或穿过点T。初始值因为整个系统被旋转为角度theta;i。而且,角度theta;i的值比系统的初始位置具有更小的值——参见图2和3,而距离LWI= ab比在启动时的值多。
我们分析的下一个位置如图6和7所示,当满足以下条件时:
(5)
图6示出了整个机构,而在图7中,我们只展示了带有绞车的部件。在这种特殊情况下,点A和AR重叠并躺在线OIT上。此外,在这个特定时刻,角度theta;i具有0的值。此刻,绳子在点T上切合绞车,这也是E和T点重叠的最后时刻。从那一刻起,E点与绞车的运动保持一定的位置,而点T则遵循绳索缠绕(退绕)过程的动力学。在这种情况下,半径具有以下值:
(6)
此外,在这种特定情况下,距离LWI= ab在绳索跳跃缠绕(展开)过程中具有最大值。通过进一步的绳索缠绕,角度theta;i具有以下值:
(7)
图5.系统的位置0<theta;i<gamma;i-绞车放大 图6.系统的位置theta;i = gamma;i
用等式(7)定义的区域,我们已经命名了CON区域(常数)。在CON区域,卷绕(展开)半径Ri、距离LWI= ab和角度gamma;i具有恒定值。当角theta;i从等式(5)中得到值时,它们保持所获得的值。在图8中,我们可以看到点E和T,角alpha;i的不同位置呈现绳索跳跃绕组(解卷)子系统的常数之一,并且在图,8中示出了确定它的方式。从图8中我们可以看到
Ri1= Ri0 d。因此,我们将绞车旋转到位置theta;i=pi;,然后在绞盘圆圈上的点F(Ri1,0)开始,在中心Oi处用半径Ri0建立切线。在我们确定的D点时尚角度线OID正席轴部分alpha;角之间的角度。此时
(8)
图7.系统的位置theta;i =gamma;i-绞车放大 图8.alpha;角的确定
- 程序包JUMPWIND minus; OW
通过对公式(1)-(8)的分析和定义,我们认为有必要形成一个程序包,我们称之为JUMPWIND minus; OW。我们使用这个程序包来检查和确认一套定义的数学原理。我们定义了一个用于绞绳绕线(开卷)过程的绞车的运动动力学,其轨迹跨度为:0<theta;i<17pi;rad。定义的轨迹是平滑的,并且以恒定的角速度定义。这个程序包只为绳索的缠绕过程而形成,因为它暗示绳索解开是在相反的方向上以相同的方式完成的。这个程序包为用户提供了跟踪所有相关变量变化的动态:半径RI、距离LWI=AB和角度gamma;i和一些其他变量。根据上一节中定义的规律,在下一节中,我们将给出模拟实验,该实验表明在较大卷绕范围内绞车(0<theta;i<17pi;rad)上绞绳绕线(解卷)过程的定义概念,在那里我们可以看到区域的周期性变化。
- 钢丝绳缠绕(开卷)过程的周期性
在第二部分中,我们详细地介绍了在距离范围为角度theta;i的绞车上绳缠
全文共11519字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16005],资料为PDF文档或Word文档,PDF文档可免费转换为Word

