英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
六自由度机械臂建模及分析
Modeling and Analysis of a 6 DOF Robotic Arm Manipulator
Jamshed Iqbal, Raza ul Islam, and Hamza Khan
摘要:在许多情况之下,物理系统的一些行为,可以通过使用分析模型表达,通过使用分析模型法,可以得到更好的表达与效果。机器人的建模和机器人的分析具有涉及运动学方面学科的必要性并且进行囊括。对于在一个中具有多个自由度或者在多个关节中都具有多个自由度的高自由度的机械臂,这一机械臂的逆运动学的解析方法是机器人建模分析领域研究中最为重要的课题。本文提出了六自由度机械臂的运动学模型,并分析了六自由度机械臂的工作空间即其工作范围。提出的模型可以控制机械手在非结构化环境中实现任何可到达的位置与方向。正向运动学模型基于机械臂位移位置的DH矩阵确定。对于已给定的机器人末端执行器所需的位置和方向,已建立的逆运动学模型可提供所需的相应运动副角度。正向运动学模型已使用MATLAB的Robotics Toolbox进行了验证,而逆向运动学模型已在实际的机械臂上实现。实验结果表明,使用已开发的模型,机械臂的末端执行器可以在plusmn;0.5cm的精度内指向所需的坐标。这项工作中提出的方法也可以适用于解决其他相似类型的机械臂的运动学问题。
关键字:机器人建模,机器人运动学,机器人系统仿真,串联结构分析
- 导论
物理系统在许多情形下的行为非常复杂,并且这些情形涉及到关键领域,而这些行为却难以去分析预测。而机器人的建模受到经典物理系统的约束,而机器人的建模极大推动了对于系统性能这一专业领域的科学研究和调查。
机器人建模包括研究它的运动学。运动学模型仅考虑机器人的运动而不考虑导致产生运动的力。机械臂的动力学领域研究涉及与运动当中几何性质以及时间相关的属性的研究,尤其是机器人的各个连杆之间相对运动以及与时间相关的运动的研究。机器人运动学为机器人的空间内移动提供了理论上的描述支持例如机器人末端效应器的位置与方向的关系和机器人关节的变化。运动学模型的问题通常分为两个附属的分支问题。第一种是正向运动学,用来解决正交直角坐标系中机械装置的位置和方向问题,提供了动力结构和关节部位坐标的资料和数据。第二种是逆向运动学(逆向运动学),用机器人末端效应器的位置和方向的相关信息反向计算出关节的相关参数的变化。如果是具有连续性的机械臂,这一机械臂的逆向运动学问题比正向运动学更为复杂。
机器人的运动学模型同样促进工业生产的半自动化发展和自动化发展。由于任务性质和操作环境的影响,工业机器人通常由一系列的刚性连接所组合而成。并且机械臂的运行方式与人类的手臂有许多相似之处。而在工厂中,六自由度机械臂被广泛使用在实际生产的各个领域。工业机器人最为常见的应用场景包括点焊,喷涂,装配和制造。许多这样的应用实际上需要完成挑选和布置工作。在实际应用场景中实现这一任务一定需要机械臂的运动学模型。
在机器人建模与仿真领域,动力学是一个研究所聚焦的领域。科学界发表各种各样的机器人建模模型和分析技术。这些技术大多数基于线变换或者点变换方法,而点变换方法在机器人建模领域被广泛使用。Clothier等人提出一使用个几何模型去解决机器人系统自动化定位所需要的位置关节角度的确定的问题。四元数代数法作为一个可以解决正向运动学问题的新的方法被Sahu等人提出。Popovic等人提出了一项策略去分析臂上肢运动而Wang等人提出径向六臂对称机器人运动学研究。而一种分析仿生机器人运动学地方方法同样被提出。Cubero提出一个逆动力学模型去解决任意类型的连续型机械臂的关节处的相关运动学参数变化问题。这一模型同样基于正向运动学解法,以正向运动学为基础。Kuma提出一个虚拟机器人模型同时拥有正向运动学和逆向运动学解决方法的策略。
本论文第二节首次提出机器人的运动模型。像逆运动学一样对机器人进行建模。第三章讨论对机器人使用MATLAB toolbox建立正运动学模型的有效性并且第四章呈现机械臂的工作空间分析的结果。第五章讨论逆运动学模型在实际机器人上的实现。最终第六章进行结论总结。
- 运动学模型
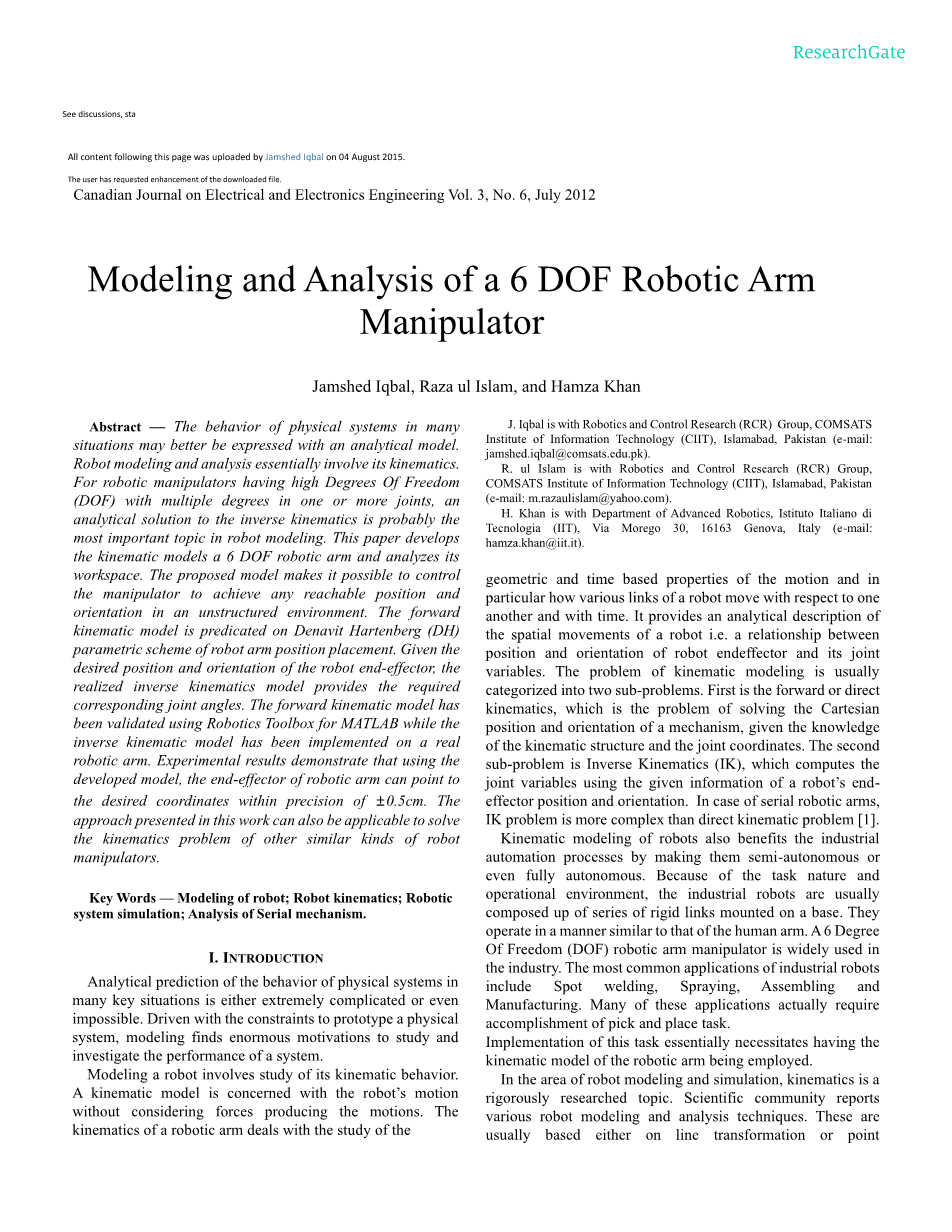
目前所使用的机器人移动平台是由来自韩国的ED公司所开发的六自由度机械臂ED722C。该机械臂被广泛使用在研究,研发和教育领域。此机械手是一个连续系列操作机械手,其各个关节皆可进行转动。机械臂的几何结构由腕,臂,肘,肩构成,与人的臂部关节构造相类似。除腕部以外所有关节都有一个自由度。而腕可在两个平面内进行运动(转动和投掷),因此末端效应器可更为灵活与方便地进行操作。通过垂直铰接的方式,可以使机器人通过视觉观察的方法而使每一个关节的可被清晰观测到。机械臂的每个自由度都可进行完全运动,而实现这一运动则通过精密伺服电机(DME 38B50G-115)上所安装的光学编码器来进行实现。末端效应器是一个带有橡胶垫的双模夹紧器。内置的机械安全性限制装置可限制关节的运动以防止控制算法出错而造成错误。表1陈列了机械臂ED7220C的主要特点。
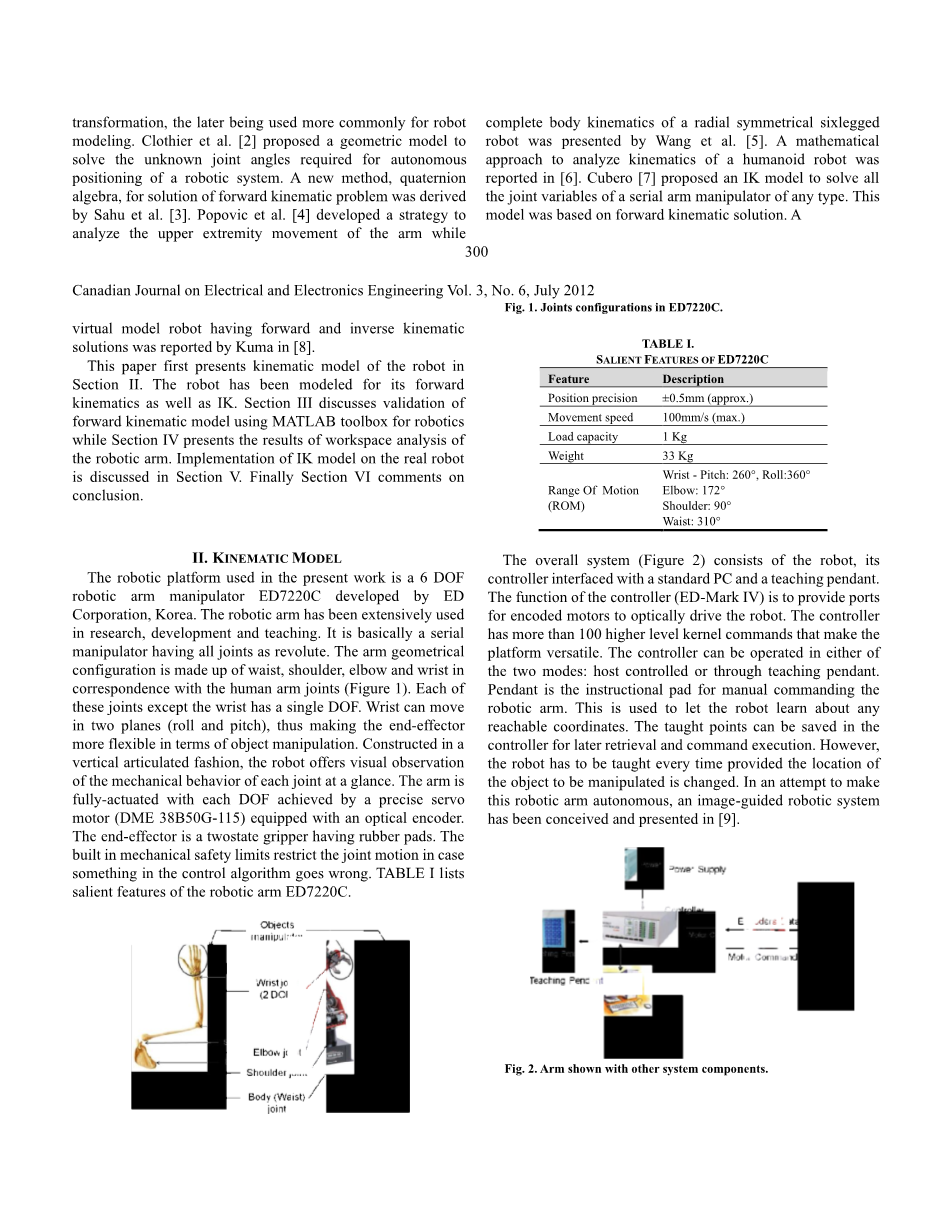
整个系统(图2)由机器人、与标准PC接口的控制器和示教器组成。该控制器(ED-Mark IV)的功能是为编码电机提供光驱动端口。控制器有100多个更高级别的内核命令,这些命令使平台具有通用性。控制器有两种操作方式:主机控制和示教器控制。示教器是手动指挥机械臂的平台。这是用来让机器人学习运动至任何可到达的坐标。示教器数据可以保存在控制器中,供以后检索和命令执行。然而,只要要操纵的物体的位置改变,则机器人每次都要进行学习。为了使这个机器人手臂自主运行,一个图像引导机器人系统已经构想出来,并在[9]中展示。
机器人的运动学问题研究可以通过不同的方法推导出结果。基于DH系数法和连续螺旋位移法这两种方法在机器人研究中广泛使用。两种方法本质上都是系统层面的方法,并且这些方法更为适合串行机械手建模。几何方法同样的也被一些研究者广泛使用在串行机械手相关的几何学领域进行研究工作。在这项工作中,由于DH方法所具有的通用性和可接受性,因而DH系数法被用来进行建立机器人的运动学模型,无论机器人运动学模型复杂程度如何,都可以用来建模任意数量的关节和连杆的机器人运动学模型。
图3展示了倒L型机器人手臂的简化后的运动学模型。前三个关节用于将刀点移动到需要的位置,后两个关节用于调整末端执行器的方向。图3中提到的链接长度在表II中列出。
DH系数法通过四重系数{alpha;i-1, ai-1, di, theta;i}进行运算工作,分别代表扭矩角度,链接长度,链接偏置,链接角度。按照DH系数法的规定,机械手的每个连杆都有一个标准正交坐标系(图4)。表三列出了机械手ED7220C的DH参数。
利用之前所推导出的[11]中每个连杆的变换矩阵的一般形式(在前一个相邻的关节i-1中用来表示关节i),并使用连杆变换矩阵的一般形式写出了机械臂各连杆对应的变换矩阵。根据复合变换的性质,再把这些单独的变换矩阵进行相乘,就得到了以其基底表示的机器人末端执行器的整体矩阵。
在(1)中,由前三行和前三列组成的3X3矩阵代表旋转,而最后一列表示末端执行器w.r.t.基座的位置(x, y, z)。
B.逆向运动学模型
逆向运动学模型在实际机器人系统中有更多的潜在的应用。逆向运动学模型计算可以得出达到给定位置和方向所需的关节角度。逆向运动学模型的应用不仅在机器人领域,在其他领域也发现了它的重要性,比如3D游戏开发领域。与正运动学相比,逆向运动学没有唯一解。确保无碰撞运行和关节运动最小的优化方案更多被优先考虑。ED7220C的逆向运动学模型采用解析法建立。这种方法确保了对于机械臂工作空间内的任何对象,并且通过运动学模型确定了正确的关节角度。前四个关节角即腰(theta;1),肩部(theta;2),肘部(theta;3)和执行投掷动作的部分(theta;4)使用这种方法,滚动工具(theta;5)是直接由对象操作所需要的方向数据所计算得出。由于变换既涉及旋转部分的运动又涉及平移部分的运动,因此由工具到基底的变换矩阵的一般形式由式(2)给出。
其中,前3x3矩阵和(px, py, pz)表示旋转并且基于机器人的末端执行器的w.r.t的编译在逆向运动学问题中是已知的。
自主开发的逆向运动学分析模型通过进一步的数学计算后屈服于代表关节角度theta;1, theta;3, theta;2 和theta;4的式子(3),(9),(12),(13)。这些式子以所给系数形式表达了所需要的关节角度。
- 正向运动模型的有效性
利用MATLAB中的Robotics工具箱对正运动学模型进行了验证。数值计算结果与MATLAB环境下机器人的位置和姿态可视化作图相结合对比研究,可以直观地反映机器人的运动特性。将不同角度的正运动学模型和MATLAB工具箱作为输入的数据,比较并且通过已得到的数据绘制得出了相应的结果。
考虑关节构型的角度[t1 t2 t3 t4]为[0 0 0 0];所以由式(1)计算得到的末端执行器在基坐标系中的位置和方向。
在MATLAB机器人工具箱中使用“fkine”命令也可以得到相同的结果。这种联合构型对应的MATLAB图如图5所示。
考虑另一种关节构型[t1 t2 t3 t4]为[90°90°-90°-90°],根据模型和MATLAB工具箱计算得到末端执行器在基底坐标系中的位置和方向相关的数据。图6描述MATLAB所绘制的连接结构图。
图7为关节构型的[t1 t2 t3 t4]为[0 90°90°0],并进行正变换之后的结果。
- 工作空间分析
随着机器人技术的进步和在各种应用中使用机器人的趋势的迅速增长,机器人的工作空间也成为除了速度、精度和重量之外的主要性能参数。机器人的工作空间,也称为其工作范围,实际上表达了机器人到达特定区域的能力。根据机器人关节的运动范围和连杆的长度,可以通过这些数据而确定机器人的工作空间。ED7220C接头的ROM在表一中有提到,而连杆长度在表二中有给出。这些链接长度和ROM信息的每个关节,利用式(1)对机器人手臂的工作空间进行了数学方面的参数求解,图8和图9分别给出了机器人在XY和XZ坐标系下的工作空间。如图8所示,机械手臂的操作能力在580 mm的圆形半径内。关节处的ROM约束结构约束了机器人在图中“V”区域的功能。
图10描绘了相关的3D MATLAB图。
- 逆向运动学模型在实际机械臂上的实现
在这里通过进行编写逆向运动学模型实现。逆向运动学模型已在实际机械手完成上实现。一个物体被放置在一个已知的位置和方向。根据用户提供的已知的信息,所开发的算法首先检查对象是否位于第四节所示的机器人工作空间内。如果对象位于工作范围之外,则在提示用户后进行算法终止工作。如果对象位于工作范围之内,逆向运动学模型根据给定的位置和方向计算指向末端执行器所需的关节角度。这些关节角度然后映射到低级别的编码器并且发出滴答声进行提示。最后,程序中基于内核的指令通过按照映射编码器滴答声提示来移动电机以执行命令。模型实现流程图如图11所示。
为了在机械臂上实现所开发的逆向运动学模型,需要确保对象(带有钥匙链的汽车钥匙)位于机械臂工作空间内。为此,通过放置如图12所示的两个块,将放置对象的平台(以z为单位)抬高。所选择的任务基本上是从一个位置挑选一个对象,然后把它放到另一个位置。源和目标的位置和方向都作为输入数据给出。
图12a显示了机械臂在“home”位置的情况(所有编码器的值都为零)。根据用户给出的物体坐标,机器人按照计算出的关节角度(逆向运动学模型)进行移动。图12(b-d)显示了机器人对物体的运动。到达目标位置后,机器人的夹持器闭合,最终抓住目标物体。拾取物体的顺序如图13(a-b)所示。然后机器人向终点移动(图14a-b),终点的坐标也由用户指定。终点最终也应该位于机器人的工作空间内。到达该位置后,机器人放下该对象(图15a-d),然后找到返回到主位置的方法(图16a-b) 。
- 结论
对广泛使用的6自由度机械手ED7220C进行了运动学建模,并对其工作空间进行了分析。利用MATLAB对正运动学模型进行了验证。推导出的正运动学模型与MATLAB仿真结果吻合较好。该机器人的逆运动学模型还提供了正确的关节角度,以移动手臂夹持器到其工作空间内的任何位置和方向。IK模型已在真实的机器人平台上得以实现。从模型中得到的结果与机器人完成任务(如挑选和放置)的实际性能进行了比较。通过逆运动学模型计算关节角度,发现机器人的位置精度在plusmn;0.5cm内。这个小偏差是由很多原因造成的,即平台精度(表一中提到的plusmn;0.5mm)、接头的机械耦合、编码器与低电平刻度之间映射角度的非线性。本文提出的策略也可用于其它6自由度机械臂的建模和分析。
鸣谢
作者十分感激并对Sarah Manzoor, Aayman Khalid 和 Sana Kha在开发机械臂运动模型工作中的重大贡献做出个人的感谢。
参考文献
[1] Mark S., Seth H. and Vidyasagar M., 'Robot modeling and control', John Wiley amp; Sons, 2006.
[2] Clothier K.E. and Shang Y, “A geometric approach for ro
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236273],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

