英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
起重机防摇控制系统的载荷位置估算
越来越多的现代起重机配备了防摇控制系统,以方便起重机的操作,提高定位精度,并增加周转率。通常,这些工业起重机控制系统使用钟摆状态信息进行反馈控制。因此,需要使用摆动传感器(例如,安装在绳索上的陀螺仪)和信号处理算法来完成。这种信号处理算法需要滤除传感器和起重机的干扰,例如信号噪声和长绳索的弦振荡。通常,信号处理算法需要知道绳悬挂点的加速度。这个加速度信号通常是从驱动模型估算的。当驱动模型不确定时,钟摆状态估计精度会受到驱动模型的影响。在这份文献中,提出了一种改进的估算法,该算法不依赖于绳索悬挂点的加速度,可以较准确的估算负载位置。开发的扩展卡尔曼滤波器在利勃海尔移动式港口起重机上得到了应用,其有效性通过多次测试和GPS负载位置测量得到验证。
港口的大部分货物装卸作业都是用起重机来完成的(见图1),起重机的发展越来越趋向于自动化以提高营业额和运营安全性。起重机的自动化面临两个主要挑战:一是需要跟踪给定负载位置x L的运行轨迹x L,ref,二是需要减少起重机在工作过程中的摆动。这个控制目标可以通过前馈控制和反馈控制的组合来实现,系统状态由实验者估计得到。(参见图2)前馈控制是指根据期望的输出轨迹xL,ref计算标称信号uref,使得它在标称条件下沿着参考轨迹驱动系统。为了排除干扰和稳定摆动状态,同时也为了补偿模型误差,需要添加反馈控制△ u:
反馈信号△ugrave;是根据估计的系统状态与参考状态的偏差来计算xi;和基准状态xi;ref。状态矢量xi;包括负载位置XL,负载速度·Xl,悬挂点位置XS ,并将该悬浮点速度·XS..i.e
利用适当的反馈增益矩阵K来反馈控制
起重机的反馈控制也被称为“防摆动控制”,因为它可以抑制起重机的自然摆动。由于反馈回路可以独立于前馈控制进行调节,因此该控制方案被称为“二自由度控制”(2DOF)[ 3 ]。等式中的状态向量xi;可通过(2)直接测量。每台自动起重机都安装了测量设备以测量速度Xs和加速度。这些测量可通过编码器,电位计,甚至非接触技术(如光学或电磁传感器)来完成。负载位置X L和负载速度必须通过使用状态观察器从可用的测量信号(可能受到干扰)重新获得。本文将利用信号处理算法来估算由利勃海尔移动式港口起重机(LHM)推动的大型旋转起重机的负载位置。
摆状态估计。
目前有许多不同的方法来确定负载位置。在一些特殊场合中,使用光学相机或激光传感器来测量负载位置。在吊臂起重机上,这些光学测量装置必须安装在吊臂顶端附近,以确保当吊钩位于船舱内时吊钩的视野不会被阻碍。这给大型港口起重机上的光学系统带来了许多挑战:首先,摄像机系统可能高于雾面,这意味着负载可以从地面看到,但不能从吊杆顶端看到。其次,恶劣的环境条件如大雪可能会降低悬臂长度以下的能见度。第三,一些散装货物如煤炭在转载过程中会产生大量粉尘,从而影响视野。这些影响中的任何一个都可能阻碍从吊杆尖端到负载的视野,这使得这种测量方法的准确性不高。除此之外,带有主动光源的光学系统不能用于外壳抓取,因为这些系统没有电源。射频定位方法不能用于跟踪货钩舱内货物的装载位置。
在许多自动起重机上,负载的相对位移用旋转传感器[ 7 - 10 ]或霍尔效应传感器[ 11 ]来测量。但是这些设备对大型起重机的分辨率不够,因为角度分辨率的提高会引起绳索长度的增长,thinsp;在LHM起重机上,绳索长度可达L = 100m。
惯性陀螺仪是一种可行的负载位置传感器,它可提供高精度的测量结果,并且可抵抗多种不良的环境条件。但是由于两个原因,陀螺仪测量信号不能直接用于状态反馈:第一个原因是陀螺仪测量转速(即速度)需要载荷位置信息。第二个原因,陀螺仪的测量结果会带来严重的干扰。这些干扰包括信号偏移,绳索振荡和高频噪声。
如果已知可观测的起重机模型,则可以使用状态估计法代替负载位置的测量,从可用测量信号重建负载位置。 此外,状态估计法可以用于干扰模型的信号滤波处理。
通常,状态估计器(例如卡尔曼滤波器)使用一个表示整个设备的模型,根据已知输入的测量信号u,预测输出信号。把这些预测结果与实际测量结果y进行比较,以使模拟设备收敛到实际设备状态。当这个概念应用于起重机时,设备模型包括驱动动力学模型,刚体动力学模型和摆动力学模型。实践经验表明,驱动模型引增加了钟摆状态的不确定性,降低了钟摆状态估计的准确性。
这个缺点使得我们设计的设备模型只能描述设备的摆动力学性能。钟摆动态取决于加速度x和起重机的绳索悬挂点。因此,如果假定绳索长度L为常数,则可以通过两个广义坐标对负载位置进行参数化; 通常使用两个绳索角度来描述欧拉角中的径向和切向绳索偏转。速度x在设备模型中充当输入信号。因此,加速度x需要以其他的方式确定。Kim等人 提出用悬浮点位置x S的和预测悬挂点的加速度x来设计驱动器模型。但是,由于不确定性,驱动器模型的使用是不理想的。当传感器分辨率过低时,双数值区分度不够会导致结果准确性不足。在式[ 13 ]中表明,摆动坐标的选择允许在不知道悬挂点加速度的情况下估算负载位置XL和速度Xrsquo;L
该论文的结构如下:第二节讨论了最先进的摆状态估计方法,并且证明了钟摆模型依赖于悬浮点加速度。 第3节介绍了不依赖于悬浮点加速度的新式钟摆模型。 此外,还介绍了与陀螺仪测量和长绳长度的起重机相关的干扰模型。 第四节中,提供实验数据来验证结果,第五节中给出了最后的结论
2 经典载荷位置估计模型
使用陀螺仪测量重建起重机的负载位置是一种较最先进的估算方法,该方法主要基于钟摆模型[12,14–22]。摆锤模型使用绳索角度和绳索角速度作为状态矢量。 这种模型在第2节中介绍。 本节讨论了用于载荷位置估计的这种绳索角度模型的缺点。
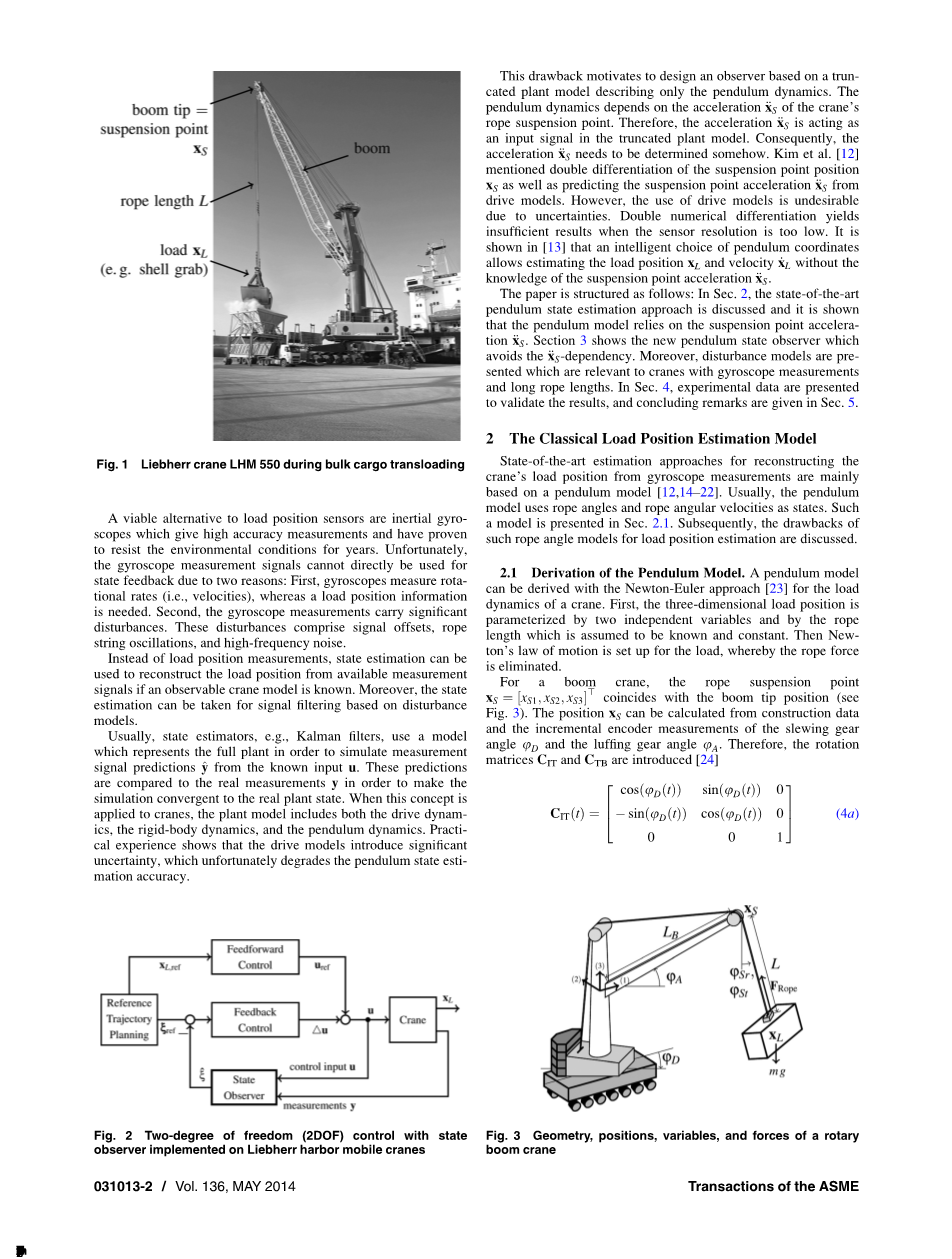
2.1 摆模型的推导。 摆模型可以用Newton-Euler方法推导出来。[23]用于起重机的负载动力学。 首先,三维载荷位置由两个独立变量和被假定为已知且恒定的绳索长度来参数化。 然后,运用牛顿运动定律为负载设定参数,从而消除绳索力。
对于吊臂起重机,绳索吊点与悬臂末端位 置(见图1)一致。 位置XS可以通过施工数据和回转齿轮角度和俯仰齿轮角度的增量编码器测量值来计算。 因此,旋转矩阵和被引入[24]
两个正交矩阵从惯性运动特性描述了从塔架固定框架到臂架固定框架的旋转。由于和随时间变化,旋转矩阵和以及悬浮点位置XS(t)都与时间相关。 鉴于不断变化的长度LB(见图。3),绳索悬挂点是
如果假定绳索长度L为常数,则可以通过两个广义坐标对负载位置进行参数化。通常使用两个绳索角度和,它们描述欧拉角中的径向和切向绳索偏转。 相关的旋转矩阵是
两个矩阵都用来定义一个指向绳索方向的单位矢量r
假定绳索长度L是负载位置的运动定义
值得注意的是,载荷位置XL的这个表达式取决于悬摆点位置XS,它作为钟摆模型中的时间变量参数。 载荷速度和载荷加速度的表达式由式(1)的时间微分导出。
与矩阵和雅可比矩阵
最后根据牛顿第二定律
载荷质量为m,重力加速度为g,绳索力矢量F。如图3所示。 矢量F绳指向绳索的方向 并具有的幅度,即
运动学方程(10) 被插入到动力学方程(12) 中,并将结果乘以方程(5)中定义的JT。。 从D#39;Alemrsquo;s原理得到和摆动力学方程
方程(14) 定义了q的两个二阶微分方程,同时产生了n 4的系统阶数。输入X的重要性可通过公式来表示。
方程(15a) 和(15b) 揭示摆动模型 (14) 的线性关系取决于悬浮点加速度,而信号xs 和xs 在接近稳态时不受影响
2.2 钟摆模型的适用性。钟摆模型广泛用于起重机的控制系统中。然而,它有一个重要的缺点,这是Kim等人首先描述的。绳悬挂点的加速度xs作为方程式的输入信号。但加速度很难衡量。增量式编码器的差异化方案可以实现所需的信号分辨率(参见参考文献[25,26])。尽管如此,差分位置测量会导致不平滑的加速度信号。这种信号只能用于经过信号滤波处理后的反馈控制,这会引入不希望的时间滞后。如果有可靠的驱动模型,则可以使用传动系统的仿真来预测悬挂点加速度[17-22]。然而,当驱动器模型不可靠时,这种方法肯定也会行不通。在利勃海尔LHM起重机上,由于摩擦力和不同的水力特性(例如,油粘度和油压缩性),驱动模型在一定程度上表现为不确定性。在第二节如图3所示,重建了摆动模型,其避免了模型对悬挂点加速度信号的依赖。
3. 不依赖悬挂点加速度信号的加载位置估计算法
改进的摆锤模型。 新模型使用公式(1)中定义的悬挂点位置XS。对于加载位置,采用一组不同的广义坐标。 而不是绳索角度时,使用新的广义坐标来表示水平载荷位置
与恒定的绳索长度L和已知的悬挂点位置xS一样,负载位置xL可以用广义坐标来表示 ,通过
这产生了xL的一阶和二阶导数,这与方程式 (9)和(10)有所不同
缩写成
为了简洁起见
两个方程都表示了式(1)的一阶近似值。 方程(22)不依赖于起重机加速度xS。因此在接近稳态运行期间,xS对非线性起重机模型没有影响。
.2理想的测量方程。 根据新型摆动模型(22),推导出利勃海尔LHM起重机的测量方程。 理想情况下,陀螺仪是用来测量其固定坐标系统中的旋转速率[24]。 给定一个陀螺旋转矩阵,它的旋转速率x1; x2; x3)通过分析矩阵
得到。在LHM起重机上,陀螺仪采用铰链式导绳机构,如图4所示。测量方程由旋转矩阵推导而来,旋转矩阵的定义见方程(1)(4)和(6)。 陀螺仪的方向矩阵可以用旋转矩阵CIT,CTR和CRG表示:
把(4)和(6)代入方程
方程(26)取决于绳索角度q1和q2。 由于这些模型状态不再可用,因此需要通过求解方程找到载荷位置。
角速度qrsquo;1和qrsquo;2同样可以通过方程(27)求得,在等式 (26)中,第一个双轴x1和x2主要用于测量钟摆的摆动速率qrsquo;1和qrsquo;2,并用于标称输出方程
角速度测量值x3主要涉及已知的回转速率D,并且不需要进一步考虑。 由于UD也出现在输出方程中,所以输出方程是时间变量并取决于Xs(t)和_Xrsquo;s(t)
3.3干扰模型。 在起重机的真实工作环境中,陀螺仪信号会受到各种干扰的影响,如图5中的测量数据所示。由于在重建的起重机模型中,摆锤状态q和qrsquo;要求具有波动的摆动动力学模型。
陀螺仪的主要干扰是测量偏差[27,28]。 在图5中,陀螺仪测量在左右振荡,而不是。 由于两个测量轴中的信号偏移和2只随时间缓慢变化,所以它们可以建模为随机波动过程
其他相关的干扰动态涉及绳索的振荡,即绳索的弯曲。 这种效果与吉他弦的振动相当,只是规模较大。 空间振动分布见图6.在图5中,相关频率在500和520s之间的时间间隔内的测量中是明显的。 与负载质量相比,绳索重量不可忽略时就会发生弦振荡。 绳索的第一共振频率可以由绳索长度L,绳索力FR和每米l的绳索质量来计算[29]:
在LHM起重机上,两个测量轴的第一个共振频率是相同的,位于2Hz 到30Hz的范围内。 利用已知的振荡频率,弦振荡可以被模拟为谐波振荡:
作为用于信号的偏移。 弦振荡在两个测量轴独立发
全文共6298字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13771],资料为PDF文档或Word文档,PDF文档可免费转换为Word

