英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
利用移动式起重机对长物体进行离地旋转起升的创新系统
摘要:实现建筑工地上的高压容器的升降需要计划、安排足够的起重机支撑起重,并需要使容器无碰撞地旋转(从水平位置到垂直位置)。一般情况下,为容器选用的移动式起重机和开发的工程升降机研究是采用两台起重机进行的,并基于起重机制造商提供的选定起重机的提升能力规格对每台起重机的升力进行了分析。这种做法相对昂贵,耗时较长。优化移动式起重机的使用和定位也是非常重要的。为了协助移动起重机的现场作业以及工程人员提供规划工具,本文提出了一种只使用一台起重机来实现这种起重的方法。利用所研发的方法和机制,重型船舶可以在地面(空中)用一台起重机旋转,所提出的机制可由一个已完善数学模型支撑,并且已集成到计算机系统中,还与先前开发的起重机选型和地压计算系统及起重机数据库集成。所开发的系统为用户提供了对给定配置的升力研究分析,以及交互图形的仿真结果,以帮助选择最佳配置。这项研究很重要,因为涉及重型升降机的项目需要减少与施工作业有关的成本和时间。DOI:10.1061/(ASCE)CO.1943-7862.0000309. copy; 2011美国土木工程师协会。
CE数据库主题标题:轮调;起重机;施工设备;施工管理。
作者关键词:船舶;旋转;摊铺机杆;双吊车;吊索;选型模块。
介绍
工业项目,包括炼油厂,通常需要一个漫长而复杂的过程;高效的起重机操作可以对整个调度、成本和安全产生显著的积极影响。预制、预装配、模块化和非现场制造是工业项目中采用的战略,以便于将部分工作转移到厂外制造中心。然而,这种将工作迁往场外的做法意味着起重机的使用要频繁得多。目前,移动起重机的规划往往是以直观和非正式的方式进行的。在建筑行业中,机械的使用一直占有主要的成本,而移动式起重机则是最昂贵的结构之一。由于建筑业的竞争力,承包商需要优化起重机的使用,以减少施工过程的成本和时间。
1、加拿大艾伯塔省埃德蒙顿,PCL工业管理公司建筑工程经理,5404-99 St.电子邮件:Rhhermann@PCL.com
2、加拿大艾伯塔省埃德蒙顿大学土木工程与环境工程系建筑工程与管理学博士候选人,加拿大,T6G 2G7。电子邮件:mdshafiv@ualberta.ca
3、加拿大艾伯塔省埃德蒙顿大学土木工程与环境工程系建筑工程与管理系副教授,T6G2G7(相应作者)。电子邮件:Mohamed a@ualberta.ca
4、加拿大艾伯塔省埃德蒙顿大学圣简分校副教授,T6C4G9。电子邮件:ahmed.bouferguene@ualberta.ca
诺特.的手稿于2009年9月24日提交;2010年10月6日获得批准;2010年10月26日在网上发表。每次讨论开放至2011年12月1日;单独讨论必须提交个别文件。本文是“建筑工程与管理杂志”第一卷的一部分。137号,第7号,2011年7月1日。copy;ASCE,ISSN 0733-9364/2011/7-478-485/25.00美元。
许多研究人员已经开发了帮助工作人员优化站点布局的方法。在这些方法中,考虑到安全、时间和成本等限制因素,以确定移动起重机的最佳位置。目前对建筑起重机的研究主要集中在开发工具,来帮助从业人员选择起重机。通常,提升重物的压力容器的起重机的选择基于最大升力和(或)最大起重半径,那些潜在的起重机和拾取位置常由有经验的电梯工程师鉴定。对于二重起重机的起重作业,很少有书面的指南和发表的文献。经验丰富的起重机工程师通过一台起重机起升重船的能力来选取起重机。
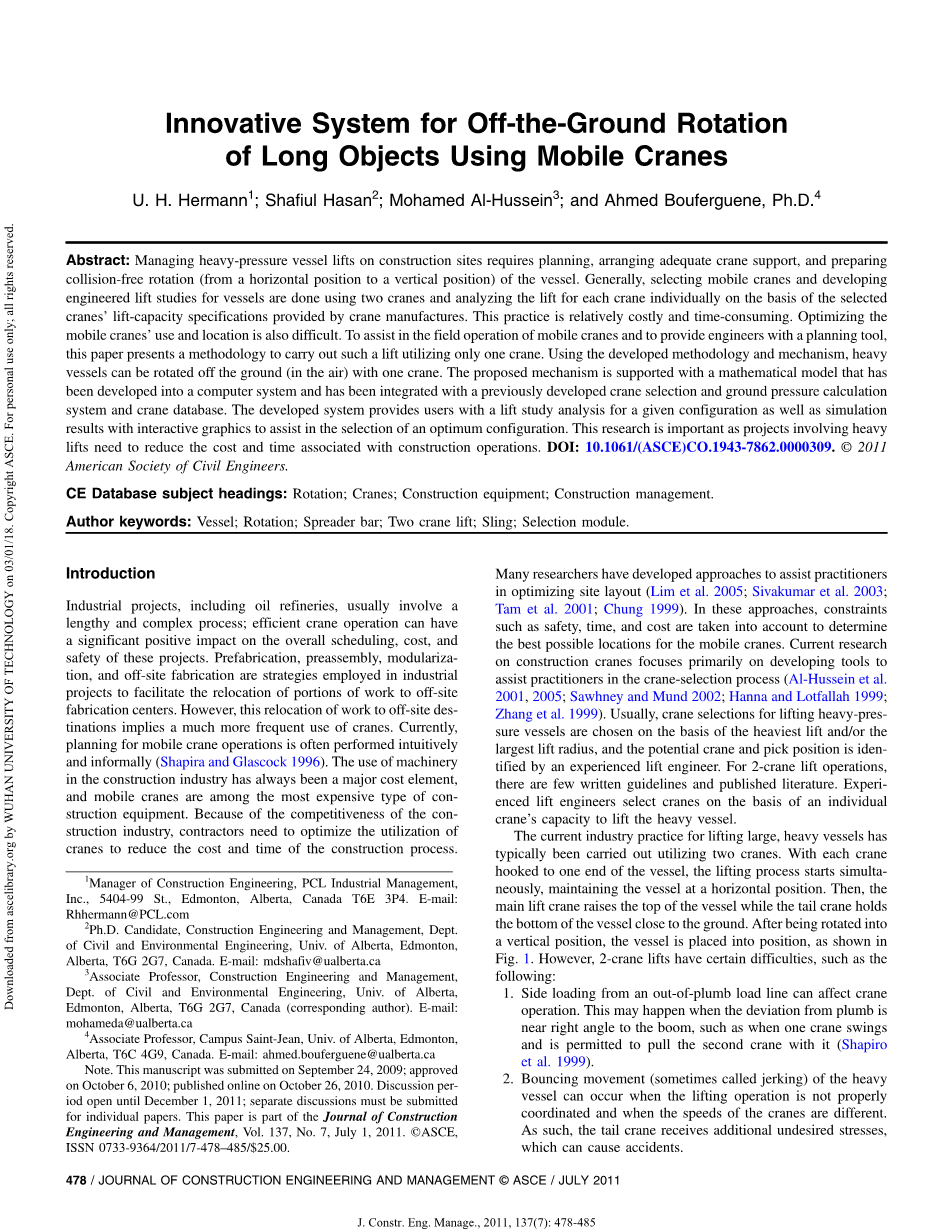
目前的行业惯例是使用两台起重机来提升大型、重型容器。每台吊车钩在容器的一端,起重过程同时开始,使容器处于水平位置。然后,主起重起重机将容器的顶部抬高,而尾部起重机将容器的底部紧贴地面。在旋转到垂直位置后,容器被放置在如图1位置所示。然而,2台起重机有一定的困难,例如:
- 从铅外载重线旁加载会影响起重机的操作。这种情况可能发生在垂直于吊臂的直角附近时,例如当一台起重机摆动时,并允许用它拉第二个起重机。
- 当起重操作不协调,起重机的速度不同时,重型容器的弹跳运动(有时称为抽动)就会发生。因此,尾吊车会受到额外的应力,这会导致事故。
图一
- 容器的摆动可以发生在尾翼起重机的行驶方向上。表面积大的物体对风很敏感,在一定的高度上,风力可以驱散,将物体置于空中并产生摆动动作。
- 瞬时效应是由于多机操作,负荷周期性地从吊钩偏离中心。格栅吊杆起重机的设计是为了将每个摆动的负载传递给地面。和任何附加的力作用在不同方向的结构可能会引起重大的安全隐患。当吊车和尾车行走时,在起重阶段会产生瞬时效应,从而引起正向和反向的运动。
- 吊杆在一个物体的串联升降机中可能发生碰撞。这样的事件可能在二重起重机操作结束时由于荷载转移到尾吊车时发生。在起重作业中,从一个起重机到另一个起重机的任何空载转移都是至关重要的。
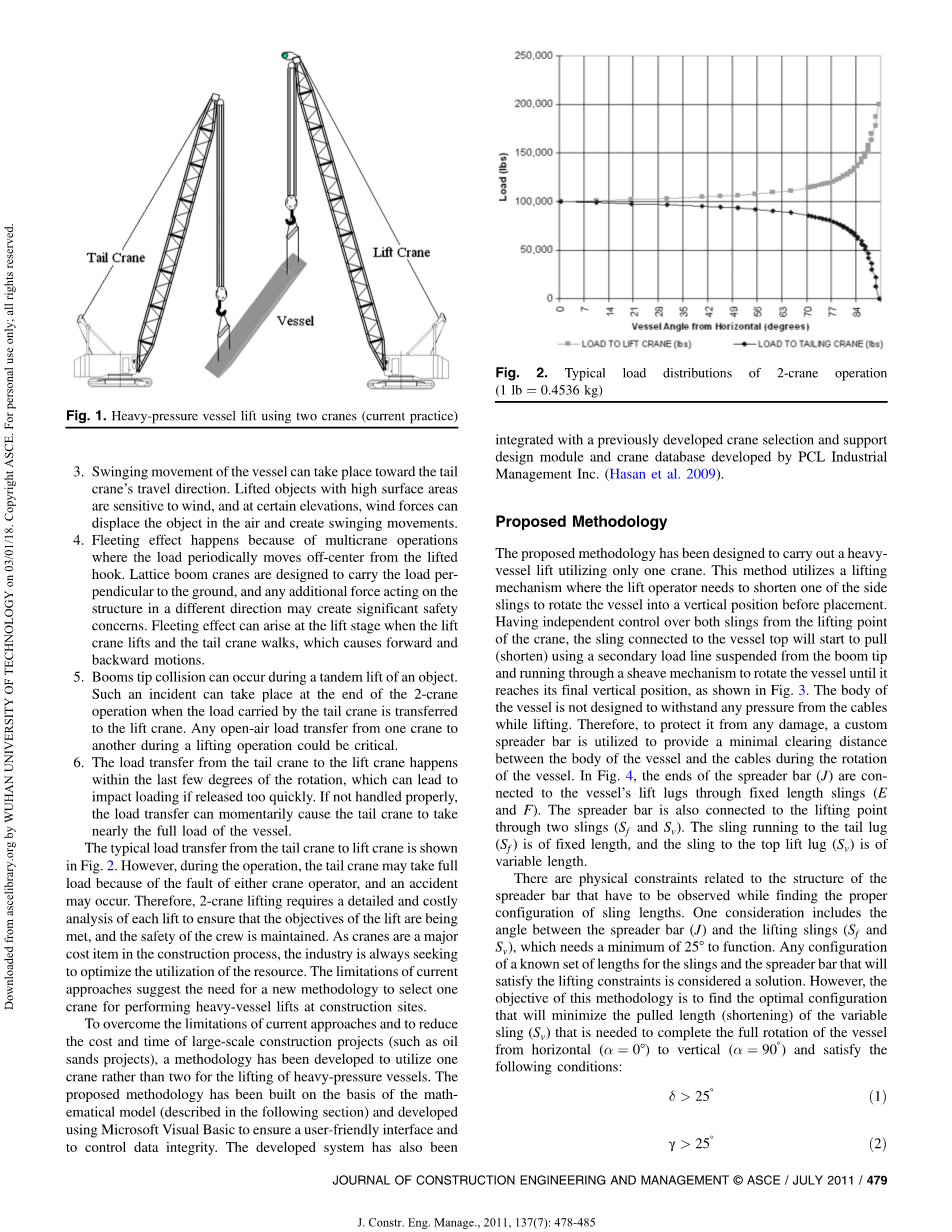
- 从尾部起重机到起重机的载荷转移发生在旋转的最后几度范围内,如果释放得太快,会导致冲击载荷的产生。如果处理不当,载荷转移会使尾翼起重机承受容器的满载。
典型的从尾部起重机到升降机起重机的负载转移如图2所示。然而,在操作过程中,由于起重机操作人员的失误,尾部起重机可能会满载,并可能发生事故。因此,二重起重机起重需要对每一部升降机进行详细而昂贵的分析,以确保升降机的目标得以实现,并确保员工的安全。由于起重机是施工过程中的主要费用项目,因此该行业一直在寻求资源的优化利用。现有方法的局限性表明,需要一种新的方法来选择一台起重机,用于在建筑工地进行重型容器升降机。
为了克服现有办法的局限性,减少大型建设项目的成本和时间,已经开发了一种使用一台起重机而不是两台起重机来提升高压容器的方法。该方法建立在数学模型的基础上(见下节),并使用microsoft Visual Basic开发,以确保用户友好的界面和控制数据完整性。已开发的系统也是集成了以前开发的起重机选择和支持设计模块以及PCL工业管理公司开发的起重机数据库。
图二
提出的解决方法
建议的方法是只使用一台起重机进行重型容器升降机的设计。这种方法利用了举升机构,其中升降机操作者需要用减短的吊索的一端在将容器旋转到垂直位置。从起重机的起重点对两个吊索进行独立控制后,连接到容器顶部的吊索便开始使用悬挂在吊臂上的载重线来拉动。 通过滑轮机构旋转容器,直到它到达最后的垂直位置,如图3所示。容器不能承受任何来自起升缆绳的压力。因此,为了保护它不受任何损坏,我们习惯性使用一根长条为容器主体和使容器旋转的缆绳提供一个最小距离。在图4中,通过固定长度的吊索(E和F)将长条(J)的末端与船舶的升力耳相连。长条也通过两个吊索(SF和Sv)连接到提升点。尾耳(SF)上的吊索是固定长度的,到顶升凸耳(Sv)的吊索是可变长度的。
图3
在找到吊索的适合长度时,必须考虑到与吊杆结构有关的约束。其中一个考虑因素是,吊杆(J)与吊索(SF和Sv)之间的夹角,至少需要25°才能发挥作用。满足提升约束的吊索和展开杆的已知长度的任何布置都是一种解决方案。然而,这种方法的目标是找到最优的配置,以最小化完成整个旋转所需的变量吊索(Sv)的拉长(缩短)。 从水平(alpha;1/4 0°)到垂直(alpha;1/4)(alpha;-90°),并满足以下条件:
delta; gt; 25 ° (1) gamma; gt; 25°(2)
15°lt; F lt; 25° 20° lt; Sv lt; 30° (3)
Atalpha;=90 ° (4) Pj gt; 0 (5)
长条与容器之间的间隙gt;3° (6)
图4
其中:
delta;=吊杆(J)与固定吊索(SF)之间的夹角; gamma;=吊杆(J)与可变起重吊索(Sv)之间的夹角;
F=侧吊索的长度F; Sv=长度; PJ=对摊铺机杆的力(J)。
分析涉及三个问题:
- 拟议解决办法的结果:它离目标有多近,实现目标需要什么;
- 提升机制:变量如何受到其几何形状的影响;
- 提出的解决方案的方法:它是如何进行的解决方案,是否有任何替代的解决方案。
设计分析为给定的结构提供了一种解决方案。计算的载荷是静态载荷,计算载荷是静态载荷,而索具和长条是按ASME B30.20标准设计(ASME 2008),这需要安全系数为5。安全系数较小的起重机的设计;冲击载荷必须最少。其目标是找到满足所需约束集的最优吊索长度。提升机构的几何结构是了解影响其变量的因素的一个重点。这个几何图形可以描述为四边多边形上的一个三角形.。展开杆(J)和两个吊索(SF和Sv)形成三角形,容器采
用两侧吊索(E和F)。 )与扩展条(J)一起形成一个多边形。为了对起重装置进行力分析和应力计算,这个几何需要在x-y坐标系中有一个唯一的可识别的位置。长条是三角形和多边形的共同元素。三角形中的吊索Sv长度和多边形边theta;和phi;的角决定了长条的坐标。下面的类比说明未知变量是如何受到几何影响的:
- 长条(J)和侧吊索具有一定的运动范围,角theta;和phi;不是唯一的,但可能的值范围受到展布杆和吊索长度的限制(E和F)。如图5所示;
- 容器的重心在起重时,必须与连接点垂直对齐。因此,连接吊杆(J)和连接点的两个吊索(SF和Sv)将缩小运动范围。由于变量提升吊索(Sv)的初始长度未知,theta;和phi;值的范围被缩小,但不减小到a。
图5
这种类比导致了这样一种情况:对于给定的配置,可能没有一个与之对应的位置。但是,这有一系列可处理的解决方案:在选择该范围的一个元素来推进其余的计算之前,必须确定其边界,用这个范围的一个元素来推进其余的计算。
主要方法是求出容器各给定位置的theta;和phi;值,以及吊索Sv的最大和最小长度。容器的位置由其与水平轴的alpha;角决定。角alpha;给出从0到90°值代表容器的完整的旋转从最初的水平位置最终的垂直位置。容器的旋转可以用一种交替的方式来表示,从可变吊索(Sv)初始水平位置的初始长度开始。然后,在逐渐减小吊索Sv长度时,计算出容器的角度,并表示其完全旋转。用户需要输入角度theta;的初始值。角phi;可以用方程式(7)-(13)来计算。
K= D sinalpha; (7)
L= C cosalpha; (8)
M= B cosalpha; (9)
N= H sinalpha; (10)
G= K L M N (11)
Q=( B C )sinalpha;-( H D)cosalpha;(12)
phi;=a tan{([M N)tan(theta;-alpha; rho;) Q ]/( K L)-alpha; rho; (13)
其中rho;=a tan[(D H)/ (C B)]
角alpha;是指容器与水平轴之间的夹角,是一个从0°到90°的任意增量的输入。图4中显示了所有这些变量。
一旦确定了吊索的长度,就可以计算出所有的角度。将容器从水平位置旋转到垂直位置,可以通过alpha;角从0°到90°的增量变化或通过改变0°到90°的长度来进行数学计算。从最小值递增长度(Sv Min)到最大长度(Sv Max)。而不是用alpha;角的增量变化来表示容器的旋转,从计算的角度来看,通过改变吊索Sv的可变长度,然后相应地计算角度alpha;,这样做会更加方便。分析的结论是,在船舶处于初始水平位置时,吊索Sv可能存在范围。因此,第一步将是找到最大和最小值。 限制吊索Sv,然后在这个范围选择一个初始长度。利用方程式(14)至(17)可以计算吊索的长度:
beta; = acos(K L Esintheta;)/SF (14)
lambda;= a sin(Q F cosphi;- E costheta;)/J (15)
delta;=beta;-lambda; (16)
Sv=(Jsup2; SFsup2;-2J*SF*cosdelta;)frac12; (17)
在每个吊索和摊铺机杆中的作用力可以使用方程式(18)-(24)进行计算:
gamma; = a cos[(Jsup2; Svsup2;-SFsup2;)/(2J*Sv)] (18)
tau; =gamma;-lambda; (19)
Pe = Ptot(M N)/Dist/ cos(theta;-alpha; rho;) (20)
其中Dist =[(D H)sup2; (C Bsup2;)]frac12;
Pf = Ptot(K L)/ Dist/cos (phi; alpha;-rho;)(21)
PSv = Ptot/(costau; tanbeta; sintau;) (22)
PSF = Ptot costau;/cosbeta; (23)
PJ = PSFcosR Pecos(lambda; 90-theta;) (24)
其中Pe=侧吊索的力E;PF=侧吊索的力F;PSF=固定吊索的力(SF);PSv=可变起重的力;
和PJ=在长条中的力(J)。
所有变量都如图4所示。
利用
全文共8430字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13593],资料为PDF文档或Word文档,PDF文档可免费转换为Word

