英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
带电绝缘子自动清洗机器人的研制
Joon-Young Park*, Byung-Hak Cho, and Seung-Hyun Byun
Korea Electric Power Research Institute (Korea)
摘要:为了防止绝缘子破损,研制了一种新型的双重绝缘子串清扫机器人系统,对国家安全和国家工业和经济产生严重影响。 机器人使用安装在其两个移动体上的夹具沿绝缘子串移动。 特别是,不同于现有的使用水射流或水/空气的清洁机器人,机器人系统采用使用旋转刷和圆形运动导向器的干洗方法。
1.简介
输电线路作为民族工业的支柱起着关键作用。发生停电事故时,可能对国家安全和国家工业和经济产生严重影响。 绝缘体故障是电力故障的主要原因之一。 在本文中,介绍了一种新的清洁机器人系统以防止这种绝缘体失效。
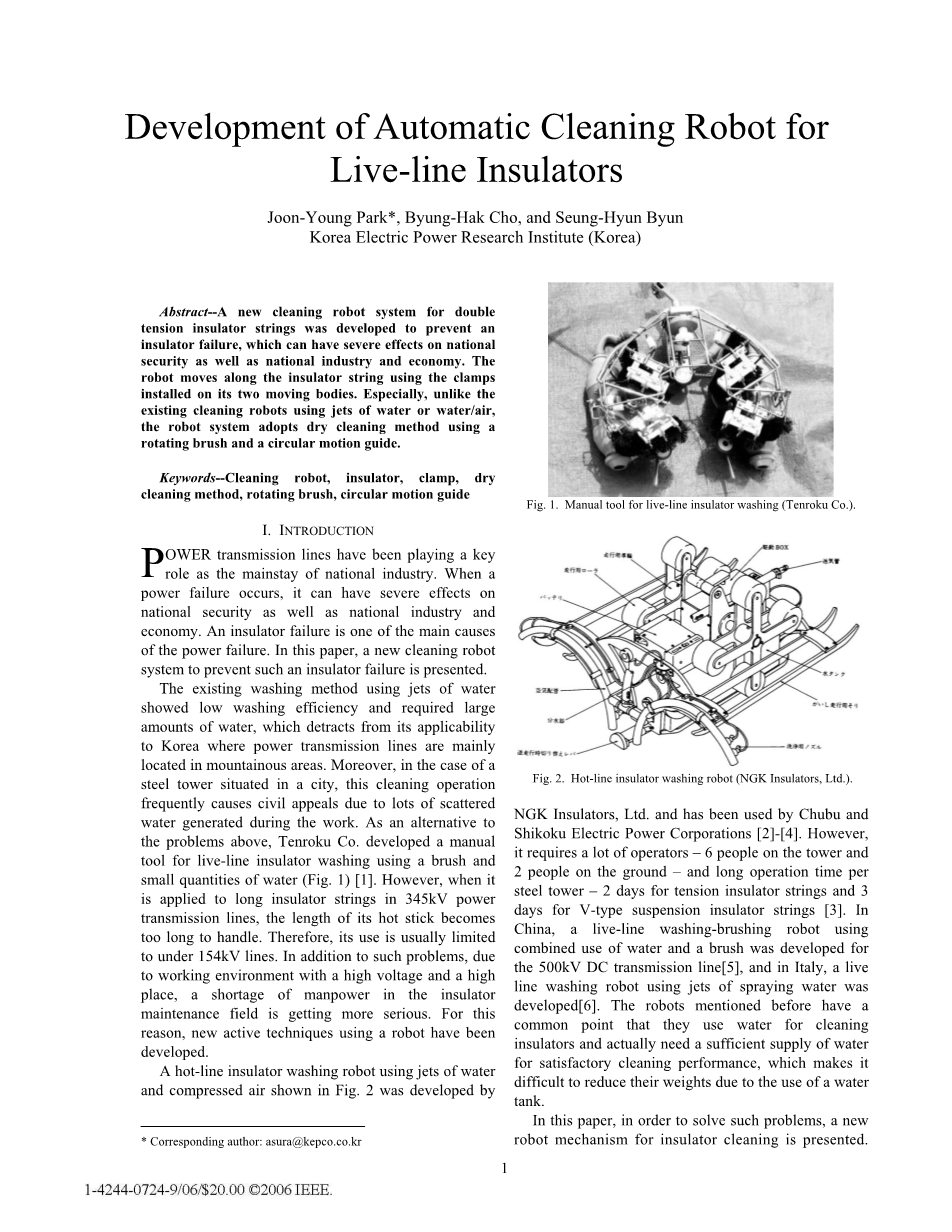
现有的使用水射流的洗涤方法洗涤效率低,并且需要大量的水,这降低了其对输电线主要位于韩国山区的适用性。而且,在钢铁塔位于城市的情况下,由于在工作期间产生大量散水,这种清洁操作经常引起民事诉讼。作为上述问题的替代方案,Tenroku公司开发了一种使用刷子和少量水进行带电绝缘子清洗的手动工具(图1)[1]。但是,当它应用于345kV输电线路中的长绝缘子串时,其热棒的长度变得太长以至于不能处理。因此,其用途通常限制在154kV以下。除了这些问题之外,由于高压高位的工作环境,绝缘子维修领域的人力短缺日益严重。出于这个原因,已经开发出使用机器人的新的主动技术。
图2所示的使用喷射水和压缩空气的热线绝缘子清洗机器人由NGK Insulators,Ltd.开发,并且已被中部和四国电力公司使用[2] - [4]。 然而,这需要大量的操作人员 - 塔内6人,地面2人-每个钢塔的运行时间长 - 对于绝缘子拉绳而言为2天,V型悬式绝缘子绳索为3天[3]。在中国,为500kV直流输电线路开发了一种使用水和电刷结合使用的直线清洗机器人[5],而在意大利,开发了一种使用喷射水射流的直线清洗机器人[6]。前面提到的机器人有一个共同点,他们使用水来清洁绝缘子,并且实际上需要足够的水供应以获得令人满意的清洁性能,这使得由于使用水箱而难以减轻它们的重量。
图1实线绝缘子清洗用手动工具(Tenroku Co.)
图2.热线绝缘子清洗机器人(NGK Insulators,Ltd.)
本文为了解决这些问题,提出了一种新的绝缘子清洁机器人机构。与现有使用水射流或水/空气的洗涤机器人不同,机器人系统采用使用旋转刷和圆形运动导向器的干洗方法。此外,为了沿着绝缘子线移动,机器人使用安装在其两个移动体上的夹具。特别是,我们通过使用面向任务的设计方法来设计我们的机器人[7] - [9]。面向任务的机器人的设计过程可以分为两部分,如图3所示:运动学设计和动态设计。我们通过实验证实了开发的机器人系统的有效性。
图3.任务导向的设计流程
2.任务分析
A.绝缘子分析
在本文中,作为我们机器人系统的应用对象,我们选择了一种广泛用于韩国345kV输电线路的拉伸绝缘子串的NGK 300kN绝缘子(图4)。在运动学设计之前,我们首先描述绝缘子的特性。
图4用于345kV双拉绝缘子串的NGK 300kN IEC球窝型绝缘子
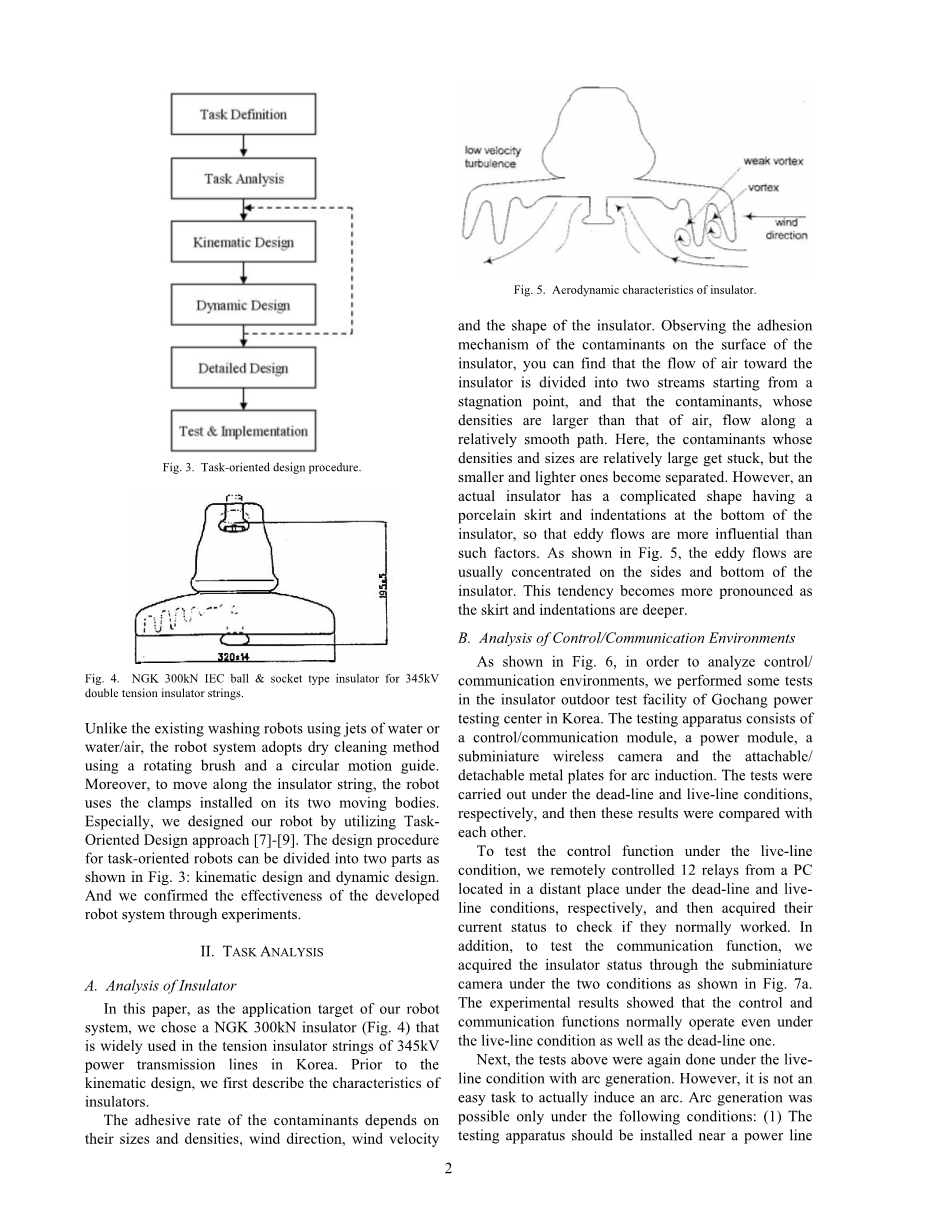
污染物的粘附率取决于它们的尺寸和密度,风向,风速和绝缘体的形状。通过观察绝缘子表面污染物的附着机理,可以发现空气流向绝缘子从滞止点开始分为两股流,而且污染物的密度大于空气的密度, 沿着相对平滑的路径流动。 在这里,密度和尺寸相对较大的污染物会卡住,但较小和较轻的污染物会分离。然而,实际的绝缘体具有复杂的形状,在绝缘体的底部具有瓷裙和压痕,因此涡流比这些因素更有影响。如图5所示,涡流通常集中在绝缘体的侧面和底部。 随着裙子和凹痕更深,这种趋势变得更加明显。
图5绝缘体的空气动力学特性
B.控制/通信环境分析
如图6所示,为了分析控制/通信环境,我们在韩国高场电力测试中心的绝缘子室外测试设备中进行了一些测试。 该测试装置由控制/通信模块,电源模块,超小型无线摄像机以及用于电弧感应的可拆卸/安装金属板组成。 试验分别在死线和实线条件下进行,然后将这些结果相互比较。
(a)高场绝缘子室外测试设施
(b)测试仪器的安装
图6.控制/通信功能测试
为了在实时线路条件下测试控制功能,我们分别从位于死线和火线条件下远处的PC远程控制12个继电器,然后获取它们的当前状态以检查它们是否正常工作。 另外,为了测试通信功能,我们通过超小型摄像机在如图7a所示的两个条件下获得了绝缘体状态。实验结果表明,控制和通信功能即使在线路条件和死线条件下也能正常工作。
(a)不产生电弧
(b)拱门一代
图7.通过摄像头进行通信功能测试结果。
接下来,上述测试再次在带有电弧生成的火线条件下完成。然而,实际诱发电弧并不是一件容易的事。只有在以下条件下才能产生电弧:(1)测试装置应安装在电源线附近,如图6b所示。(2)电弧不仅仅是由金属板引起的。 出于这个原因,我们另外将一根长电线连接到金属板上,并将其端部靠近电源线,如图6b所示。
在电弧生成的情况下,12个继电器的遥控成功率仅为20%,并且与相机的通信经常中断—即使可能,也会收到带有噪声的屏幕截图,如图7b所示。从上面的实验结果可以看出,除了电弧生成以外,控制/通信功能在实时线路条件下工作良好。这个事实表明,考虑到当前的湿度和天气条件,清洁机器人只能在无电弧产生的情况下使用。
3.运动设计
A 清扫方案
绝缘子的清洁方法大致分为两类:湿法清洁法,干法清洁法。 现有的绝缘子清洁机器人采用了前一种使用水的方法。 这种方法最大的问题是需要大量的水来进行充分的清洁。 为此,机器人应该携带水箱和相关设备,因此不能轻便。 此外,在韩国大多数输电线路位于山区的钢铁塔中供应足量的水实际上很困难。 考虑到这些方面,我们为我们的机器人系统采用了干洗方法。
B.清洁机制
对于干洗方法,考虑到以下因素,我们选择了旋转刷:(1)绝缘体的表面与顶部不同,具有圆形形状(2),绝缘体的底部具有复杂的形状,污染物。此外,从绝缘体具有圆形表面的事实可以很容易地知道只有一个d.o.f.需要使用旋转刷清洁。
为了在实践中实现这一点,也就是说,为了沿着绝缘体的圆周移动旋转刷,需要360度范围内的圆形导轨。然而,由于在绝缘子串上安装这样的导轨是不可行的,我们设计了如图8a所示的清洁机构。该机构不是使用超过360度的圆形导轨,而是通过旋转装有两个旋转刷的圆形导轨(CMGuide)进行清洁操作。
图8b显示了其详细设计,包括由正齿轮和锥齿轮组合的CMGuide,支撑CMGuide的导辊,安装在CMGuide上的两个刷子,两个刷子容器。我们使用RC伺服电机插入/缩回电刷,使用直流电机旋转它们。
(a)概念设计
(b)详细设计
图8.清洁机构的运动设计
C.移动机制
因为从一个绝缘体到另一个绝缘体的运动是一个简单的线性运动,所以最小实现这一运动所需的自由度只有一个。为此,我们选择了滚珠丝杠机构。此外,我们还组成了机器人的两部分-外框架和内框架 - 它的运动,并且每个部分利用两个夹子轮流配合滚珠轴承的运动来抓住绝缘子的瓷裙子。这种移动机构在绝缘性方面优于现有机构,因为机器人抓住的绝缘体的数量不超过两个。而且,该机构也起到了机器人框架的作用,这使得机器人结构简单且重量轻。
图9a是与清洁机构结合的移动机构的概念设计,图9b示出了其详细设计。 如图所示,移动机构由外框架,安装CMGuide的内框架,滚珠丝杠机构,夹具,滑轨和滑块组成。 该夹具有两个由RC伺服电机驱动的连杆结构。如图9c所示,它在几何学上被设计成落入奇点,当它执行夹紧操作时将瓷裙紧紧地夹紧。
(a)概念设计
(b)细节设计
(c)夹紧操作
图9.运动机构的运动设计
图10.机翼连接机构的运动设计
4.动态设计
A.材料的选择
观察由此产生的运动学设计,可以发现其部件根据其作用和特征分为四类:
- 应该有低摩擦的部件:防滑条,防滑块
- 应具有高强度的部件:齿轮,导向滚轮,滚珠轴承螺钉
- 应该具有低失真的部件:夹钳,CMGuides,内部框架,机翼连接机构
- 机器人框架的零件:外框架,外框架之间的连接板。
对于滑轨和滑块等部件,我们选择了摩擦系数为0.07〜0.11,比重低的工程塑料。 接下来,选择碳钢作为应具有高强度的部件。 对于要求低变形的部件,我们使用比碳钢轻并且强度相对较高的铝合金。
最后,机器人框架的部件占据机器人整体体积的相当大的部分,因此应该选择具有高强度和低比重的材料以减少机器人的总重量。为了选择这样的材料,我们调查了各种工程塑料的材料性能。其中,我们挑选了一些其抗拉强度与比重的比值大于75的候选物,因为这个比值越高表示每单位重量的强度越高。通过对这些材料的比较分析,我们最终选择了比重,强度以及其他特性被认为适用于机器人框架的材料。在框架制造之前,使用MSC.visualNastran进行有限元分析以验证其作为机器人框架的实际适用性。在这个分析中,我们假设每个机器人机翼总共18kg的载荷,即9kg,沿着外框的下板均匀分布。图11显示其最大位移仅为1.06mm,其最大应力为14.1MPa,仅为其118MPa的拉伸强度的12%。这表明这种材料适用于机器人框架。
(a)位移图
(b)应力图
图11.机器人框架工程塑料的有限元分析
B.电机的选择
a. 滚珠丝杠直流电机的测定
假设每个框架部分的重量和运动所需的时间分别为5kg和2.7秒,则滚珠丝杠所需的力和速度如下获得:
力= 5kgf = 5 * 9.81 = 49.05N
速度= 195mm / 2.7秒= 0.072m / s
考虑到滚珠丝杠的几何关系和安全系数,驱动滚珠丝杠所需的转矩和角速度计算如下:
我们选择了符合此规范的电机和齿轮。
b.CMGuide直流电机的确定
通过使用MSC.visualNastran进行的动态仿真,我们计算了驱动CMGuide所需的最大扭矩,如图12所示,因为很难获得CMGuide的动态模型及其解决方案。 直接驱动CMGuide的正齿轮的扭矩和速度由CMGuide和正齿轮之间的几何关系,19:1的齿轮比以及4转/分钟的CMGuide的转速获得,具体如下:
使用上述规格,我们为CMGuide选择了电机和齿轮。
图12.使用CMGuide进行清洁操作的动态模拟
C.旋转刷直流电动机的测定
(1)减速电机的长度应小于绝缘子表面的宽度;
(2)根据电刷的实际情况, 用于风道清洁的转速为570〜2000rpm[10],其最大转速为2000转/分钟
(3)转矩应尽可能大以适合干洗方式。我们选择了直流电机和齿轮来满足上述条件。所选减速电机的最大输出转矩为0.033Nm。最高速度2150rpm,全长70.0mm。
5.制造和实验
图13显示了开发的用于双重拉力绝缘子串的清洁机器人,其被命名为INCRO(INsulator Cleaning RObot)。图14显示了在下列条件下使用INCRO的实验结果:旋转刷的速度设定为2000rpm,CMGuide以4rpm的转速驱动。使用过的绝缘子在污染等级中被分类为“D”级,这意味着它们受到的污染最严重。然而,从图14可以看出,在INCRO对绝缘子进行清洁操作后,所有污染物都被清除。这些实验在死线条件下进行。我们现在正在计划将其实际应用于实时线路条件下的绝缘子清洁。当应用于钢铁塔时,INCRO使用主要由热棒和导轨组成的安装工具安装在绝缘子串的冷端。在清洁过程中,INCRO会自动将绝缘子串移至热端,然后返回至冷端。INCRO需要12分钟来清洁由36个绝缘体组成的双重拉伸绝缘子串。
(a)绝缘子清扫机器人实物图(INCRO)
(b)INCRO的旋转刷
(c)用于双重拉力绝缘子串
图13.开发的带电绝缘子清洁机器人
6.结论和正在进行的工作
本文提出了一种用于双重拉力绝缘子串的新型清洁机器人,以防止绝缘子发生故障。所开发的机器人采用干式清洁方法,使用旋转刷和圆形运动导向器代替使用水射流或水/空气,并沿着 通过使用安装在其两个移动体上的夹具来实现绝缘子串。 实验结果表明了开发的机器人系统的有效性。 我们现在正在规划其实际应用,以在实时线路条件下加倍拉伸绝缘子串。
7.致谢
本文介绍韩国工商能源部在电力工业研发项目支持下的“开发线路绝缘子清洗和检测机器人系统”项目的成果。
8.参考文献
[1] Brochure on contracts for live-line insulator w
全文共7392字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12494],资料为PDF文档或Word文档,PDF文档可免费转换为Word

