英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
可操纵的龙门起重机
本发明涉及一种可操纵的龙门起重机,更具体地涉及一种可在不同位置拖曳并在工作力的作用下可在工作场所操作的龙门起重机,包括横移式起重机。起重机,其设计目的是在相对较长的距离上提升重物或轻物,该起重机可在陆地或船上操作,对于提升起重机是非常理想的。通过诸如舱口等开口从船舱,地下室和地下室进出货物地下室和其他类似地点,对本领域技术人员显而易见的是,本发明具有其他用途和目的。
过去,已经开发出了多种形式的可跨载的龙门起重机,但在我所知的大多数情况下,如以前已知的能承载超过75吨的载重的龙门起重机太笨拙,难以操作,而且非常沉重,无法在船上使用。以前已知的这种普通类型的龙门起重机还具有昂贵且笨拙的低速作用和不精确的转向机构,而且即使不是很精确也很难做到。在许多情况下,尤其是在高度受限的区域中,可能需要使龙门起重机在负载上正确地居中或准确定位龙门起重机。据我所知,迄今为止,在任何情况下都不可能自由地,无固定地移动门式起重机,而无论从正向还是反向移动,它都基本上无法向任何期望的方向移动,直接向侧面移动。此外,也许有人提到以前已知的龙门起重机,特别是通常,那些为重型设计的起重机,没有能够均衡起重机四个角或设置在这些角上的小车上的负载的结构,由于提升机构的位置较高而无法稳定,无法实现预期的效果移动-包括在不使用令人讨厌的重型机械的情况下穿行马车,并且在不使用额外的重型和超大型设备的情况下无法将载荷升高或降低所需的距离。也可能值得一提的是,此类型的龙门起重机在此以前无法在非常短的时间内通过简单的工具对牵引或卖力操作进行调整,并且由于轮胎在低气压下挤压而失去平衡,因此会承受令人讨厌的压力和拉力,特别是在在框架结构的每个角下都使用了多轮小车。
考虑到上述内容,本发明的重要目的是提供一种克服了上述缺点的耐用、可精确操纵的转向式龙门起重机。
本发明的另一个目的是提供一种可操纵的龙门起重机,该起重机能够处理极重的负载,该起重机具有许多优点,而这些优点是无法克服的存放在与目前相同类型的龙门起重机中而出名。
本发明的另一个目的是提供一种可转向式龙门起重机,其中用于横越整个起重机的驱动马达安装在框架的每个角下方的轮式车架上。
本发明的又一个也是非常重要的目的是提供一种可转向的龙门起重机,其中采用相同的动力模式来实现行进,还可以利用整个起重机结构的一部分来将起重机转向所需的行进方向。
本发明的另一个特征在于提供一种龙门起重机,该龙门起重机在框架的每个拐角下方具有多轮小车,其具有驱动每个小车的内轮和外轮的分离的电动机,该电动机可以沿相反的方向操作,并且哪些电动机也用于将小车定位,以使起重机在所需方向上行驶。
本发明的另一个特征是提供一种可拆卸式龙门起重机,该起重机可以在基本上任何方向上向前和向后前进,包括直接向前,向右偏斜,向左偏斜,直接向侧面,或者基本上围绕起重机结构的中心点旋转或旋转。在更大直径的圆圈中。
本发明的另一目的是提供一种可转向的龙门起重机,该起重机利用多轮小车在框架的每个角下方,并且在每个车轮上具有橡胶或等效轮胎,该结构使得不会在框架或框架的其他部分上施加过大的应变。该机构也没有由于刮水而引起的任何不利影响,该起重机能够进行基本的通用运动而不会造成轮胎的过度刮擦。
本发明的另一目的在于提供一种简单,可靠和快速作用的锁定机构,以将龙门起重机的每个转向架保持在期望的调整位置,以使龙门起重机在预定方向上移动。
本发明的另一个特征在于提供一种重型门式起重机,该起重机具有较重的提升机构,该较重的提升机构位于机架上的极低点,从而使整个起重机结构的重心较低,消除了顶部的重量并大大增加了重量。结构的稳定性,特别是在负载下。
本发明的又一个特征是提供一种重型龙门起重机,其中利用了双对置的起重单板,它们以相反的方向驱动并作用在同一根电缆上,这样的滚筒被齿轮啮合在一起以进行同步操作,从而单个电动机可以利用相对较轻的重量和功率来将ioad提起和放下相对较大的距离,并且起重滚筒不必太大。
本发明的又一个特征是提供一种装备有新颖的电缆绕线装置的龙门起重机,该起重机允许相对较大的行进距离,而提升机构的尺寸相对较小。本发明的另一个特征在于该结构。电缆绕线装置的一个例子,它借助于负载引线帮助在任何位置上将龙门起重机结构的手推车悬挂在任何位置上,从而在手推车上相互等距地拉动,从而仅需要一个相对较小的电动机就可以有效地横穿拖网渔船。
本发明的另一个目的是提供一种用于重型龙门起重机上的手推车的简单且肯定的横向驱动。
本发明的另一目的是提供一种重型龙门起重机,其框架构造成能自动将载荷均匀地平均分配到起重机结构的四个角上。
尽管上面已经指出了本发明的一些更显着的特征,特性和优点,但结合附图,通过以下事实,其他特征,特征和优点将变得显而易见。
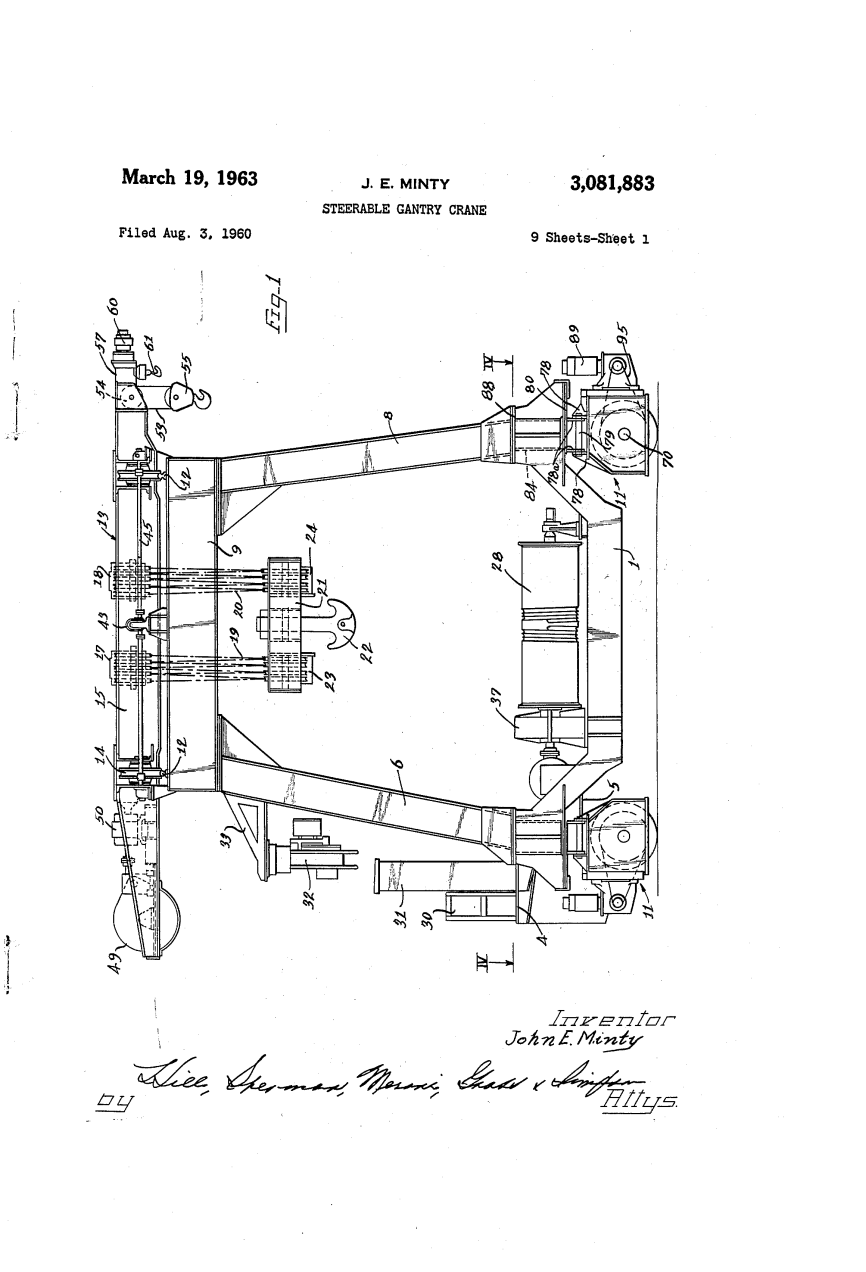
图1是体现本发明原理的龙门起重机的侧视图;
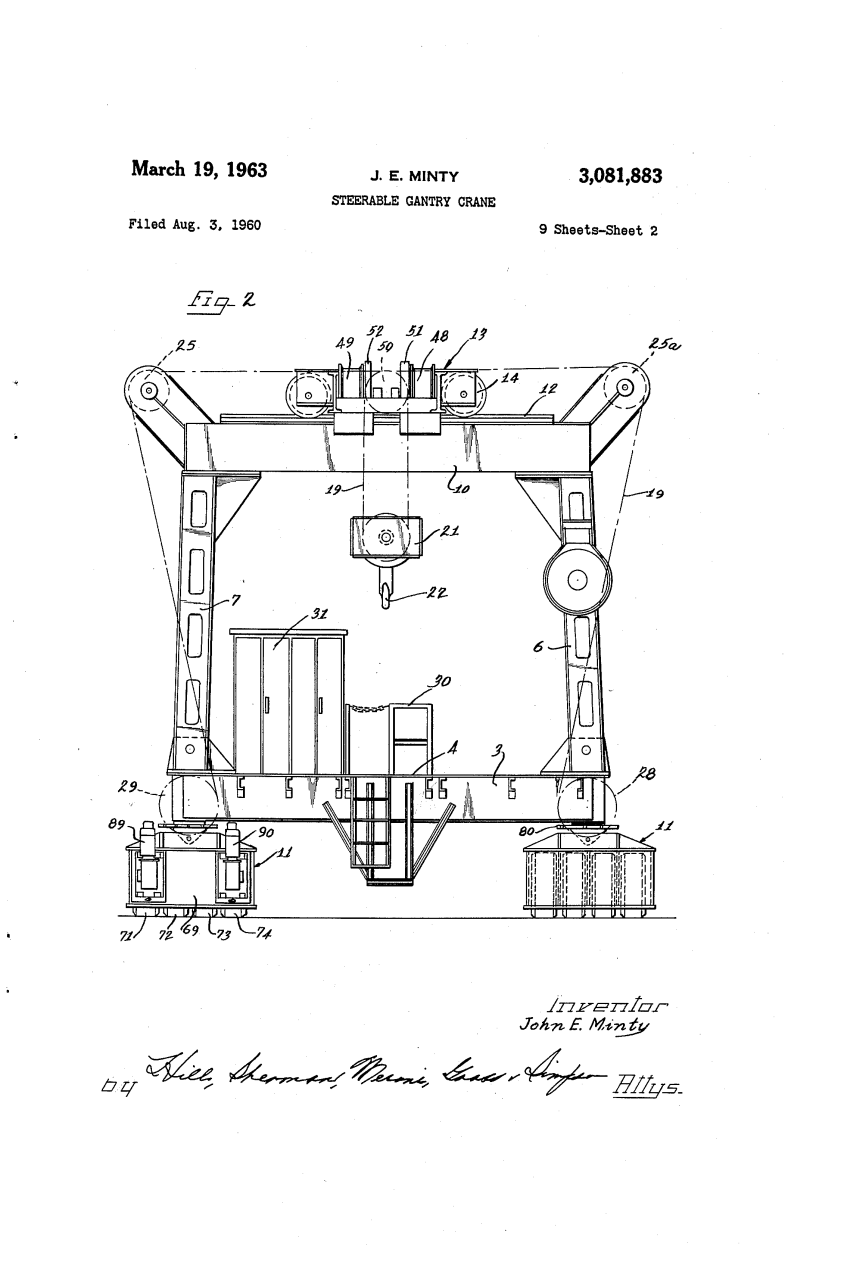
图2是图1的结构的端视图,其中省略了部分,该端因此被更清晰的称为龙门起重机的后端;
图3是图1的结构的顶视平面图,其中省略了部分。
图4是图1的结构的下部的平面截面图,基本上如图1的剖面线IV-IV所取、沿箭头方向所得;
图5是图3所示结构的各部分的局部放大图,为清楚起见省略了部分,并示出了使手推车横越的驱动装置。
图6是小车的锁定装置之一的局部放大平面图,这种锁定装置在图4的平面图中可见每辆小车相关:
图7是图6的结构的局部侧视图。从图的底部截取,其中省略了部分,部分剖开了,并且以截面显示了部分;
图8是其中一个多轮转向架和将其连接到其上的主轴的局部放大剖视图,局部正视图。
图9是图8的右下部的局部放大图:
图10是从图9的右侧截取的离合器构件的正面图;
图11、12、13、14、15和16是示意图,表示在龙门起重机的不同行进方向上对小车进行的各种调整位置;
图17是重型吊装中缆线的收放示意图。
如图所示:
可以理解,在本文所述的一般特性的龙门起重机中,可以以期望的尺寸和数量使用各种辅助升降机,并且在商业结构中将经常进行其他各种改变。特别是当龙门起重机体现了特定职责的规范时。还应当理解,如果需要,内燃机可以在各个位置被结合作为驱动装置,根据小车的位置,可以规定每个小车的车轮数量的变化以及车轮特性的变化。
起重机等操作,并且当然可以在不脱离本发明原理的情况下采用这种结构上的改变。因此,通过示例而非限制的方式,我选择了龙门起重机其中移动部件由电动机驱动,门式起重机从一个位置拖曳到另一位置,并且在工作位置时,可以通过足够长的合适的导体从任何合适的本地电能中供电。优选使用电动马达来操作龙门起重机的各个可移动部件,因为从这种马达获得的部件的控制速度快,并且移动性强,而操作者则只需很少的精力,因为起重机本身必需的。
还应当理解,尽管为了控制这种门式起重机的各个部分而需要相当复杂的电路,但是由于具有这种特性的机器的接线也未在此示出或描述。因为部件的电气部件和设备通常由机器制造商以外的人员提供。电路本身。
因此,本发明不构成本发明的一部分,并且应假定本发明与足够的布线和电气设备相关联以实现所需的操作。如本领域所公知的,通常由专门从事该领域工作的公司设计和安装必要的必要开关面板,控制板,布线和其他电气设备。
一般的机器
机器的主框架结构在其上体现出下部或底盘框架的直立框架装置,以及连接直立构件的顶部框架。框架构件优选地被制造为具有适当尺寸和形状的大梁,以支撑机器的各种部件。承担重物,并留出一定空间以移动某些零件。根据标准的机器组装实践,可能需要通过螺栓,铆钉或焊接将各种框架构件连接在一起。框架结构在图1、2、3和4中最清楚地看到。下部框架部分包括一对相似的相对的下落中心梁1。
下半部分框架包括一双类似的反对放弃中心梁1和2纵向延伸的机器,和交叉梁3连接梁1和2的末尾这个框架部分开放向前端机器以使机器能够跨越一个负载。所述的横梁3进一步设有后向延伸的楼板第4节,以提供操作人员的平台,所述的横梁3的前方设有横向机构支撑平台5,并连接到侧梁和后梁。
从较低的框架部分支撑起的是四个角腿,包括向内和向外倾斜的后腿6和后腿7,以及一对向前的角腿8,在图中只能看到其中一个角腿,它稍微向内倾斜,但也向后倾斜。
在直立的腿的顶部上,令人怀疑地是矩形框架结构,其包括相对的纵向延伸的大梁9-9和一对相对的横向大梁10-10。因此,下部或底盘框架部分基本上整体地结合到四个直立或拐角腿和顶部的矩形框架结构。
在车架的每个角落下都有一个多轮自供电小车。通常用数字11表示的装置被安装在垂直的主轴上以便身体旋转。这四个小车使整个龙门起重机移动,并且如将在下文中更完整地出现在这里,可以以各种角度布置小车以确定起重机的方向。
上部框架结构的横向大梁10-10每个都设有轨道12,从而提供了用于手推车的轨道,通常由数字13表示。装有合适的轮子14用于骑行。台车可以在起重机结构的横向上前后移动。如在图3中最佳可见,手推车体现了合适的侧框架构件15-15。小车16-16,以及其他认为必要的交叉连接大梁。手推车载有所有辅助葫芦及其驱动器,以及多个滑轮17和18主提升缆绳或绳索19和20绕在其上。从缆车19和20上的手推车上起吊的是承载主提升钩22的提升梁21。提升梁21还分别承载有用于绳索19和20的多个滑轮23和24。绳索的中央部分绕在手推车滑轮和提升梁滑轮上,并且绳索19从那里穿过起重机一侧的上部框架结构上的滑轮25,而绳索的另一部分越过在框架的相对侧上的类似的滑轮25a。用类似的方式,绳子在框架顶部的绳轮26上放有2绳索20,在绳索27的相对部分上放有绳索20。双绳索鼓28和29安装在底盘框架构件1和2的下落中心部分,绳索19和20都位于缠绕在每个鼓上。用于驱动提升滚筒28和29的机构被承载在在框架的后部在底梁1和2之间延伸的平台5上。由于该主要起重机构设计用于升高和降低超过75的负载吨位时,将滚筒和驱动机构定位在机架的非常低的位置,可为整个起重机结构提供稳定性。
在上述框架结构后面的地板或甲板4上是操作员的控制板30和用于必要的电气控制装置的面板31。在操作位置从任何合适的电源供电,并采用合适的电缆上卷轴32从框架后部的托架33上悬挂下来。
主提升机构
在图1和图4中可以很好地看到提升和降低重负荷吊钧22的机制。位于跌落中心底盘梁1和梁2上的两个鼓28和29由上述框架平台5上的电机34同时驱动。电机的纵轴与滚筒的纵轴成直角布置,电机最好安装在滚筒的中间。相同的驱动机制是处理之间的发动机和鼓声,每个包含一个电机轴扩展33通向一个减速机36岁,这可能是一个蜗轮减速器,减速器的输出轴是耦合的输入轴减速齿轮火车封闭齿轮箱37.各自的电缆或缠绳筒被直接连接到最后一个齿轮箱37,磁性制动器作用于相应的电机轴延伸35。因此,两个相反的鼓28和29是齿轮连接在一起的,因此必须一致,但在相反的方向上操作,因为一个蜗轮蜗杆减速器36是左手,而另一个是右手。这种卷筒结构允许使用大量的绳索或电缆来提升相对较高的高度,而每个卷筒只有中等大小。
在图17中,我已经用图解的方式说明了19和20的每一根绳索或电缆的受力情况。例如,绳子19的一端固定在鼓上。它的另一端固定在鼓上。从滚筒28开始,绳索向上延伸至机架一侧的头滑轮25a上,然后穿过台车17座的滑轮和十字头或吊梁21座的23座。然后绳子穿过框架另一侧的头滑轮25,向下到达滚筒29,采用这种筛分方式,在第17块和第23块之间最好有8根绳索或电缆。绳子20是用同样的方法穿过的。滑轮17和提升梁23之间的绳索部件数量不是关键,可以根据需要进行调整。小车与吊梁之间必须至少有两段绳索,如果需要两段以上的绳索来承载货物,则应以2的倍数为偶数,如4、8,12、16等。
因此它将看到吊梁21、钩22和负载从而悬浮在海湾的两个绳子或电缆和这种安排许可电车13来回被遍历而没有任何改变垂直位置的负载。如果需要的话,提升和小车通过这两种运动可以同时进行,但只有提升机器本身才能在小车通过时增加或减少负载,牵引绳从桶中拉出,两者相互抵消。这就提供了一个优点,使小车的横移只需要一个相对较小的力,并且小车只需要一个小的横移电机。
性格鼓和传动机构的提升机底部的起重机架,而不是安装在电车有这样的机制,增加了龙门起重机作为一个整体的稳定和消除任何沉重的这个结构,同时允许使用相对较轻的电车。
小车横移传动方式
现在,特别参照图3和图5,可以看到,通过小车13的机构包括一对反向的丝杠39和40,它们沿着顶部梁10-10延伸,并安装在合适的轴承41上。这些丝杠中的每一个都可以包括一个合适的轴,其螺纹部分的长度等于预期的小车导线。固定在台车机架上,相邻的每辆小车上都有一个42号螺母,螺纹安装在相应的丝杠上,最好是一个自润滑型螺母。
该丝杠由减速附件44的电机带动并由齿轮连接在一起,并在顶部侧梁的中间位置进行了大量的布置。从减速器的每一侧延伸出一个传动轴延伸到一个锥齿轮箱,该锥齿轮箱又通过一个挠性联轴器连接到相应的丝杠上。最好在减速机44处获得所有减速。可以采用适当的传动装置使39号螺钉和40号螺钉同时向同一方向旋转,或者在另一方面,两颗螺钉可以相对地穿在一起,一颗左螺纹,一颗右螺纹。
当电机43通电旋转丝杠时,小车将明显地横向移动到龙门起重机的上甲板上,达到所需要的程度。由于39号和40号丝杠上的螺旋角较低,加上作用在43号发动机轴上的43a型电动制动器,当启动时,可以防止丝杠的转动,因此小车可以很容易地保持在任何需要的位置。因此,在任何方向上都不可能有任何外力作用于小车的运动。需要注意的是,由于19号和20号绳索的作用,在小车横移过程中,除非主提升机构同时运行,否则负载的高度不
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236347],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

