
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
塔式起重机回转运动中的有效载荷扭转动力学及振动抑制
Jiaohui peng . Jie Huang . William Singhose
摘要:对于建筑施工中具有挑战性和危险性的材料处理应用,推动了对塔式起重机的动力和控制的研究。由于缆索不可避免的载荷摆动和扭转,使得塔式起重机在移动大型有效载荷很困难。虽然工作目的是减少点质量的扭转,但是限制有效载荷扭曲的效果不是很好。所以建立了塔式起重机承载分布质量梁的非线性动力模型,此外,文中还提出了开环控制方法,以减少回转运动中载荷的摆动和扭转。仿真和实验证明了模型的理论动态行为,验证了所提出控制方法的有效性。
关键词:塔式起重机、分散有效载荷、扭转、摆动、振荡控制
电子辅助材料:在线版本(https://doi.org/10.1007/s11071-019-05247-4)包含补充材料,可供授权用户使用。
- 引言
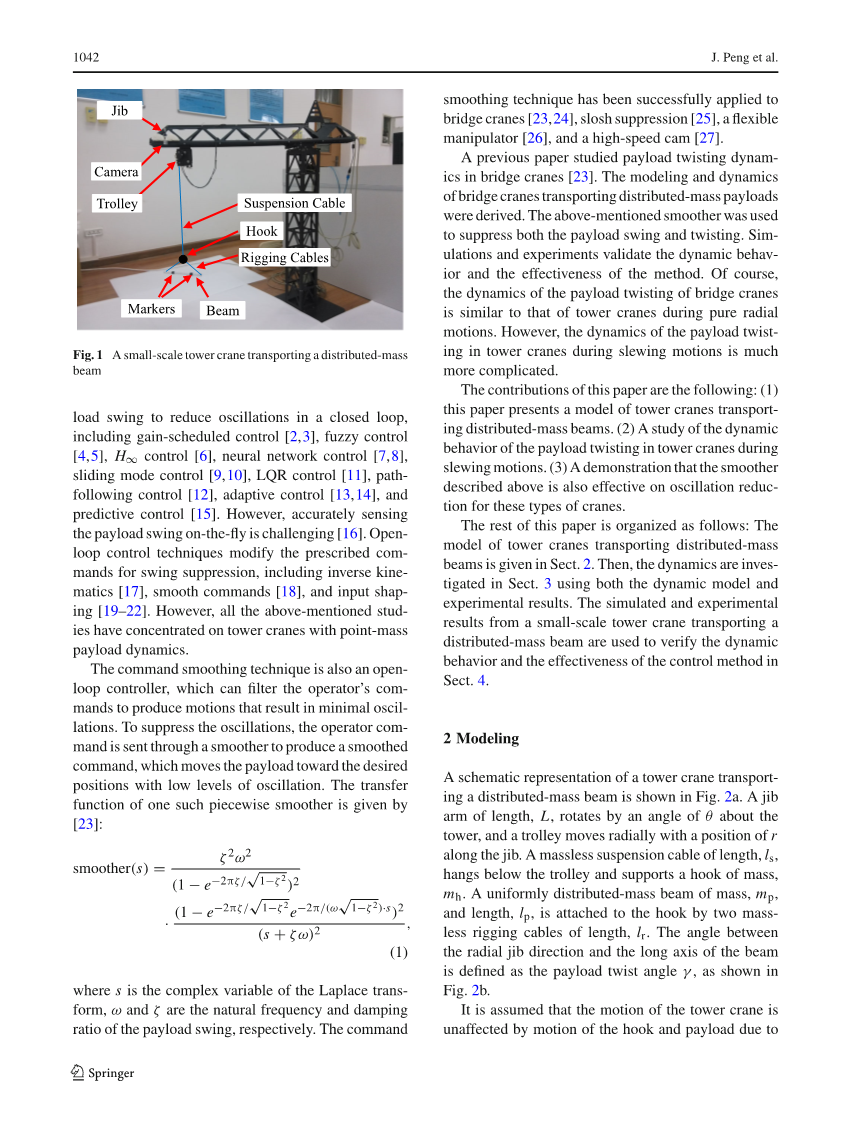
塔式起重机广泛应用于世界各地的建筑施工中,如图1所示,这类起重机通过在塔身周围旋转一个吊臂,一辆台车沿吊臂进出,并吊起一个悬架装置来移动货物。然而,由人工操作的运动所起的有效载荷振荡,对于安全和有效的操作来说是一个很大的限制。之前人工通常通过缓慢移动和等待未衰减的运动来解决振荡问题。
巨大的有效载荷通过用于运输大型物体的吊机缆索悬挂在吊钩上。由于索缆的有效载荷摆动和有效载荷扭转,该起升机构的动力学非常复杂。此外,操纵任务可能更具挑战性,因为有效载荷扭转不能手动控制,即使是熟练的操作员也无法控制。因此,有必要对大型塔式起重机的扭转动力学及其控制进行研究。
图1运输分布质量梁的小型塔式起重机
许多研究者对点质量有效载荷和塔式起重机的有效载荷摆动动力学及其控制进行了研究[1]。由于忽略了载荷大小,点质量载荷模型不能捕捉载荷的扭转。针对具有点质量有效载荷的塔式起重机,有效载荷摆动的控制方法包括反馈控制器和开环控制器。反馈控制方法测量或估计有效载荷摆动以减少闭环中的振荡,包括增益调度控制[2,3]、模糊控制[4,5]、Hinfin;控制[6]、神经网络控制[7,8]、滑模控制[9,10]、线性二次型控制[11]、路径跟踪控制[12]、自适应控制[13,14]和预测控制[15]。然而,准确地感知在运动中的有效载荷摆动是有一些困难的[16]。开环控制技术修改了规定的摆动抑制指令,包括反向运动学[17]、平滑指令[18]和输入整形[19-22]。然而,上述的研究都集中在具有点质量载荷动力学的塔式起重机上。
命令平滑技术也是一种开环控制器,它可以跟踪操作员的指令,以产生最小振动的运动。为了抑制振荡,操作员的命令通过平滑器发送,以产生平滑命令,该命令将有效载荷移动到具有低振荡水平的所需位置。这种分段平滑器的传递函数由[23]给出:
(1)
其中s是拉普拉斯变换的复变量,和分别是有效载荷摆动的固有频率和阻尼比。
该命令平滑技术已成功地应用于桥式起重机[23,24]、晃动抑制[25]、激振器[26]和高速凸轮[27]。前文研究了桥式起重机的有效载荷扭转动力学[23]。推导了桥式起重机运输分布质量有效载荷的数学模型和动力学模型。上述平滑器被用来抑制有效载荷的摆动和扭转。仿真和实验验证了该方法的动态性能和有效性。当然,桥式起重机的有效载荷扭转动力学与塔式起重机在纯径向运动时的动力学相似。然而,塔式起重机在回转运动过程中有效载荷扭转的动力学更为复杂。
本文的主要贡献如下:(1)建立了塔式起重机运输分布质量梁的数学模型。(2)塔式起重机回转运动中有效载荷扭转的动力学行为研究。(3)论证了上述光滑器对这几种类型起重机的减振效果。
本文其余部分组织如下:第一节给出了塔式起重机运输分布质量梁的模型。2.在此基础上,对其动力学进行了研究。3.采用动力学模型和实验结果相结合的方法。利用一台小型塔式起重机运输分布质量梁的仿真和实验结果,验证了该控制方法的动态特性和有效性。
- 建模
塔式起重机运输分布质量梁的示意图如图2a所示。长度为L的吊车绕塔旋转theta;角,小车沿吊杆以r的位置径向移动。长度为ls的无质量悬索悬挂在台车下方,并支撑质量钩mh。质量为mp、长度为lp的均匀分布的质量梁通过两条长度为lr的无质量索具缆索连接到钩子上。径向吊臂方向与光束长轴之间的夹角为有效载荷扭转角gamma;,如图2b所示。
假定塔式起重机的运动不受吊钩和有效载荷运动的影响,这是由于高传动比齿轮传动和摆角正弦的影响,而摆角的影响很小。
- 塔式起重机侧视图 (b)扭转角度
横梁
gamma;
P0 P0
r
台车
臂架移动方向
theta;
beta;x
g
Nz
Nx
N
y
横梁
beta;y P0
gamma;
基座
吊钩,mh
悬索,ls
ɑy
ɑx
beta;y
beta;x
图2塔式起重机运载分布式质量梁的模型
该模型还假定阻尼比近似为零,将吊钩建模为点质量,悬索的长度在运动过程中不变。模型的输入是臂架的角加速度和小车的加速度。输出是悬索alpha;x和alpha;y的转角、相对于悬索beta;x和beta;y的转角和有效载荷扭角gamma;。
利用凯恩方法,导出了图2中模型的非线性运动方程。摆角alpha;x、alpha;y、beta;x和beta;y以及有效载荷扭角gamma;的方程式为:
(2)
其中M是质量矩阵,f是重力项、离心项和科里奥利项以及控制输入项的列矩阵。矩阵M和f以补充的可下载材料的形式给出。
为了验证(2)中所示的非线性运动方程,用梯形速度驱动模型(2)和图1所示的小型塔式起重机进行了80°的回转。臂架在时间为零时开始加速,这会引起有效载荷摆动和扭转。然后,臂架在4秒后减速,这会引起额外的摆动。臂架在加速和减速之间以20°/s的最大回转速度驱动。有效载荷摆动的实验和模拟响应如图3。
径向位置(mm)
- 从上方观察的有效载荷摆动
时间(秒)
(b)有效载荷扭转
图3模型的实验验证
图3a所示,而图3b则显示了有效载荷扭转角速度gamma;的结果。有效载荷摆动位移是有效载荷质心相对于小车的位置确定值。实验数据与非线性模拟结果吻合较好。模拟结果与实验结果之间的差异主要是由于摩擦和空气阻力,实验响应的衰减揭示了这一点,这在图3b的扭转数据中最容易看到。
- 动力
在纯径向运动中,塔式起重机的动力学与文献[23,24]中提出的桥式起重机的动力学相似。当初始扭角限制为零时,纯径向运动不能激发有效载荷扭转。然后,文献[24]给出了这种情况下纯径向运动时的单纯方程:
(3)
其中
(4)
(5)
通过假定平衡位置附近的小振荡,可以从简化模型(3)导出线性化模型,以近似纯径向运动。在(3)中建模的纯径向运动期间有效载荷摆动的线性化固有频率为[24]:
(6)
其中
(7)
(8)
方程式(6)还可以用来估计回转运动中有效载荷摆动的自然频率,这是因为有效载荷摆动只表现出微弱的非线性动力学行为,特别是因为塔式起重机的旋转相对较慢。摆动频率取决于悬索长度、索缆长度、有效载荷长度和质量比。索缆长度、有效载荷尺寸和质量比对第二模态摆动频率omega;2的影响大于第一模态摆动频率omega;1。随着索缆长度的增加,第一模态摆动频率omega;1略有下降,而第二模态摆动频率omega;2急剧下降。同时,质量比和有效载荷大小对第一模态频率omega;1的影响很小。如果钩子质量为零,则(2)中的双摆动力学可以简化为单摆动力学。(2)中的双摆动力学可以简化为单摆动力学。(2)中的双摆动力学可以简化为单摆动力学。还假定平衡点附近的摆角很小。因此,可以推导出扭转动力学的模拟模型。
(9)
扭转加速度取决于回转运动(外部激励)和有效载荷摆动(参数激励)。在图3b的响应的剩余阶段(无外部激励),扭转响应类似于简谐运动。有效载荷围绕摆动方向来回扭曲,因为有效载荷摆动引起扭转加速度。扭转加速度的大小取决于有效载荷摆动的幅度,而扭转加速度的符号取决于有效载荷的位置。当有效载荷摆动限制为零时,扭转加速度也为零。在载荷扭转角速度恒定的情况下,惯性效应会使载荷单向旋转。
图4显示了有效载荷摆动的各种振幅和第一模态频率的扭转频率。请注意,摆动的振幅和频率是独立变化的。扭转频率低于第一模摆动频率。
图4不同振幅的扭转频率和摆动的一阶频率
摆动幅度和频率对扭转频率都有较大的影响。扭转频率随摆动幅度和频率的增大而增大。这种效应在物理上可以解释为扭转加速度的大小和符号之间的干涉。随着摆幅和频率的增加,有效载荷在扭转加速度符号发生变化之前旋转得更快。此外,在有效载荷摆动为零的情况下,扭转频率为零,这是因为有效载荷摆动为零会导致扭转加速度为零。因此,有效载荷扭转的恒定角速度将使有效载荷向一个方向旋转,因此,降低摆动的幅度和频率将导致扭转频率的降低。
初始扭角对有效载荷扭转动力学也有很大影响。图4还显示了初始扭角为15°、30°和45°时的有效载荷扭转动力学。扭转频率随初始扭角的增大而减小。这种效应也可以解释为扭转加速度的磁矩和符号之间的干涉。随着初始扭角的增大,有效载荷在改变扭转加速度符号之前会进一步旋转。有效载荷扭转的复杂动力学行为对初始扭角很敏感。因此,有效载荷扭转表现出强烈的非线性动力学行为。
- 实验结果
用图1所示的分布质量小型塔式起重机验证了模型(2)的动态特性和平滑器(1)的有效性。
图5塔式起重机的控制体系结构流程
臂臂绕塔架旋转的最大角度为plusmn;155°。小车位置在三角架的75厘米处。臂架是由带编码器的电机驱动的。运动控制卡将主机连接到放大器。一个细长的横梁和一个网球分别用作有效载荷和钩子。当吊钩质量为32g时,有效载荷的质量和长度分别为155g和29.7 cm。吊索长度为54 cm,索缆长度为16 cm。悬索和索缆均采用Dyneema方式制造。
在臂架上安装了摄像机,以记录有效载荷上两个标记的位移。摄像机以每秒30帧的速度拍摄视频。标记用来测量有效载荷的摆动位移和扭转角。两个标记点的位移平均值用来表示有效载荷摆动位移。利用这两个标记点的逆切函数可以计算扭角速度。
图5显示了实验控制体系结构。通过控制界面产生基线冲击波-海岸-冲击波加速度(梯形速度命令)。然后,平滑器(1)对该命令进行修改,以创建用于旋转吊臂移动手推车的平滑命令。用(6)中的悬索长度ls、索缆长度lr、有效载荷长度lp和质量比c估算光滑器的设计频率。第一模式摆动频率omega;1用于开关。试验中将设计阻尼比设为零。无阻尼系统的平滑器由下式给出:
(10)
通过实验考察了臂架回转80°,最大速度为20°/s时的效果,图6给出了基线梯形和平滑指令对有效载荷摆动的实验响应。剩余振幅是臂架停止后的最大挠度[2
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236109],资料为PDF文档或Word文档,PDF文档可免费转换为Word

