
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于键合图的海上液压起重机操作的多体动力学模型
Yingguang Chu Vilmar AElig;soslash;y
Aalesund University College Aalesund University College
Aring;lesund, Moslash;re og Romsdal, Norway Aring;lesund, Moslash;re og Romsdal, Norway
Norwegian University of Science and Technology
Trondheim, Soslash;r-Troslash;ndelag, Norway
摘要
本文主要阐释了一种关于海上起重机起升系统的键合图模型,该模型是由关于三个绞点,一个绞车,一段钢丝绳,一个摆动载荷的三自由度组成的。该多体模型包含了系统和操作方式的三维动画的动态特性,用拉格朗日方法去推导起重机的多体动力学方程。拉格朗日方程提供了一种干净整洁的方式来实现一种叫做IC场的特殊形式的键合图的应用。这种基于键合图的模型包括针对其他领域模型的接口,比如输入设备、控制系统、液压驱动器和传感器。海上起重机的操作挑战性在于起升重物、系统刚度和起因于不稳定工作平台的摆动载荷的影响。业内人士越来越需要一个对于海上操作建模和仿真的全面虚拟环境。该成果将高度增加设计产品和系统,测试新元件和控制算法以及训练操作者的效率和效益。该多体动力学模型是建模和仿真海上起重机操作的核心建筑板块。
关键字:动力学 ,多体,海上起重机,键合图,IC场。
介绍
起重机是迄今被发现的各种用来运输、吊装、回收和拖曳操作的海上船舶和平台中主要类型机器之一。海上起重机不像陆上起重机一样能够安装在固定的工作平台上,而是要经历由波浪导致的动荡引起的大量问题。这导致了海上起重机的操作在效率和安全上面临更多的挑战 ,尤其在恶劣海域的极端天气条件下,受的限制更为显著。根据海岸联合物流(jLOTS)数据显示,当海洋达到海况三(由皮尔逊 - 莫斯科维茨海波普里1.0-1.6米范围的显著波浪高度和13-16kts的风速决定)[1] 时货物交换通常会停止。大量的时间和成本被浪费掉了只是为了等待一个更好的天气条件。在操作过程中构建一个海上起重机的动力学模型对于起重机设计、测试控制算法和新零件以及操作训练都有重大的价值
以往的文献中对于多体系统动力学有几种建模方法和软件工具。拉-海瑞提出的关于林业运输起重机建模的讨论,用标准的欧拉-拉格朗日公式去建立运动方程[2]。ADAMS是一个广泛使用地帮助机械系统进行运动学和动力学分析的软件工具。用户能够建立由刚体或者通过约束绞点互联的柔性体组成的多体系统[3]。然而,近些年来,通过数学模型或者实际硬件集合控制系统的多学科动态系统的建模和仿真已经引起了越来越多的关注。刘提出了一种在不同的环境下建模和虚拟现实仿真[4] 的集合机械和电液系统(一种机器人挖掘机)的方法。几个其他的尝试在多学科系统建模与仿真中也能被识别出来。一个主要的共同挑战之一就是子程序之间的接口和不同软件工具之间的通信,因为即使计算机的性能提高了也没有单一的软件程序能够处理集合多域模型的的实时仿真。
键合图方法是一种建模技术,它的工作原理是描述物理系统的能量结构。根据能量守恒定律,涉及不同能量域的模型能够使用相同的广义变量去开发,即产品是功率的“努力”和“流”。菲利普尼提出了一个关于由几个单一的刚体和绞点组成的多体系统的总体实施方法 [8]。用欧拉方程去表达刚体的运动。将任意约束加到被约束的自由度上,这可能在非线性系统中导致因果问题。在实时模拟中该模型可能会更加坚固。Rokseth提出了一个对于多体机械手的动力学模型[9]。相比于菲利普尼的方法,这个描述机械手运动的公式是由拉格朗日方法推导,这在使用键合图时将给予更清洁的代表性和实施性。一种被叫做IC场的特殊类型的键合图为了动力学方程的实施被使用了。一个叫做Maple的符号数学软件被用来计算这个动力学方程。这个机械手的模型不包括起重机的驱动器,因为驱动器通常是液压马达和液压缸。在目前的研究中,这个物理起升系统是由一个带有三个转动绞点的折臂式起重机和一个绞车组成,这些绞点是通过液压马达和液压缸驱动的,而绞车是由一段钢丝绳和一个三维空间中的摆动载荷组成。这个描述起重机运动的动力学方程将使用拉格朗日方法去推导。作为一个案例研究,使用智能控制算法测试模型的仿真结果将被展示。受机械手控制的启发,无论是使用起重机主体还是绞车,一个带有升沉补偿功能的灵活的控制算法将被我们这个研究团队提出和展示[10]。起重机通常比机械手有更少的约束绞点,即更少的自由度,而且代替了电动马达,海上起重机大部分是由液压缸驱动去提供足够的起重能力。因为键合图方法是一种基于能量的建模方法,所以被用作驱动起重机的液压驱动器模型将更容易集成。这个用来实施建模和仿真的软件工具叫做20-sim[11]。起重机动力学模型是海上起重机操作仿真的核心建筑板块。
多体动力学的推导
推导机械系统动力学方程的方法有很多,所有方法的产生等价于套公式;然而,这些公式的不同形式更适用于不同目的的计算和分析。这里引用拉格朗日方法来进行推导,该方法是依赖于机械的能量特点去计算运动方程。拉格朗日方程对机械系统动力学提供了一个优雅的公式,因为它用广义坐标而不是单一个体的质量和惯性系统去描述系统的运动,这样减少了方程数目。这些方程在用键合图建模时尤其有用,而且通过这个方法在对非线性机械系统建模时可以避免代数环和因果问题的衍生物。对于机器人动力学的计算,一个普遍而又彻底的拉格朗日方法的描述就被给出来了 [12]。
拉格朗日,L,被定义为等式中系统动能和和势能的差值,由方程(1)给出
(1)
对于机械系统的拉格朗日运动方程中的广义坐标q由方程(2)给出。
(2)
其中是作用在第i个广义坐标下的外力或者转矩。
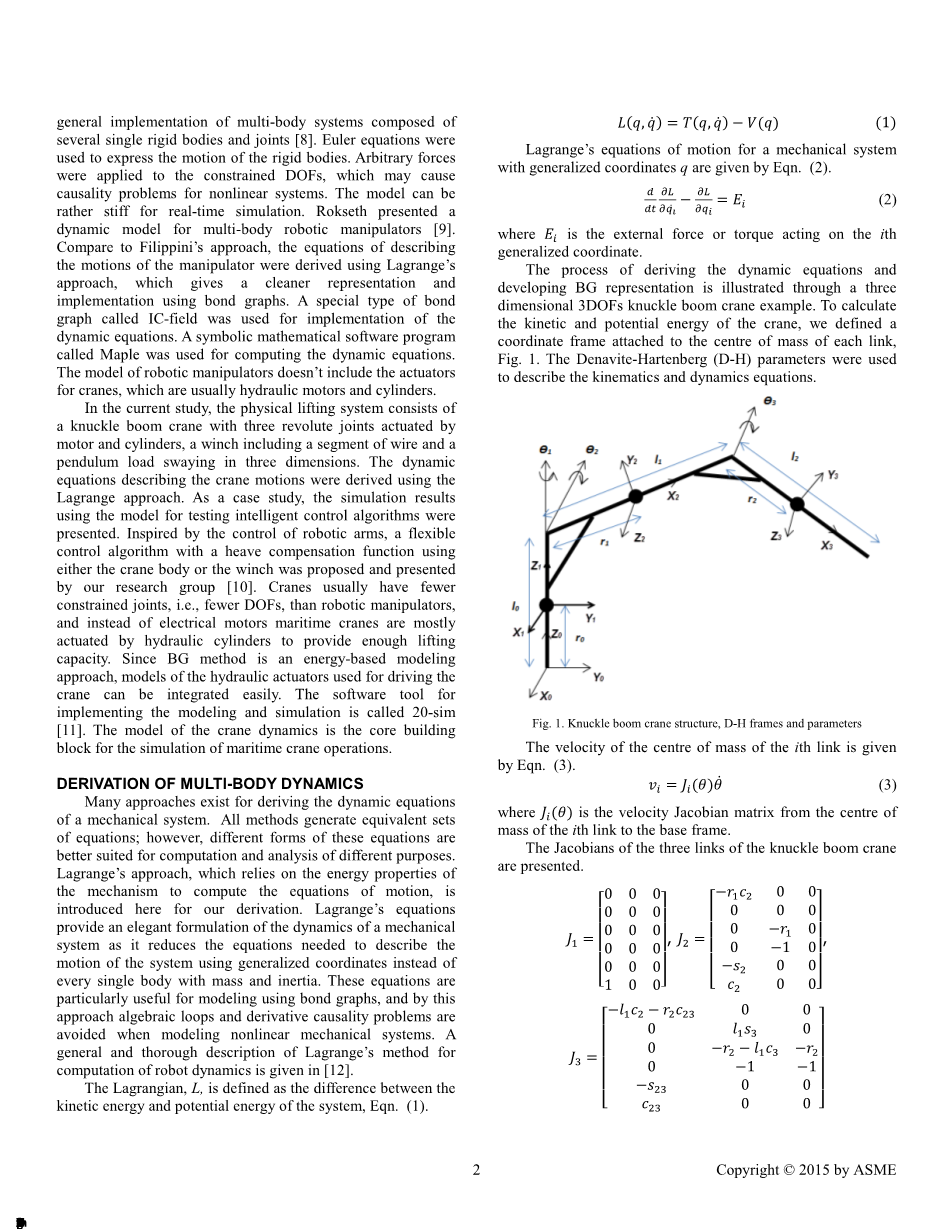
推导动力学方程的过程和开发键合图代表是通过一个三维三自由度的折臂式起重机来举例说明的。为了计算这个起重机的动能和势能,我们定义了一个附加在每个连杆的质心上的坐标系,如图1。迪纳维特-哈坦伯格(D-H)参数经常被用作去描述运动学和动力学方程。
图1,折臂式起重机结构,D-H框架和参数
第i根连杆质心的速度通过方程(3)给出
(3)
其中是从第i根连杆的质心到基架的速度雅克比矩阵。
折臂式起重机的三根连杆的速度雅克比矩阵如下所示。
其中。同样的概念适用于整篇文章。
每根连杆的动能通过方程(4)来计算。
(4)
其中是第i根连杆的广义惯性矩阵。如果分配的局部坐标系和和连杆的惯性轴线对齐,则惯性矩阵具有如下的一般形式。
总动能可以通过方程(5)得到
(5)
其中被定义为起重机的总体惯性矩阵,并通过公式(6)给出。
(6)
总势能用公式(7)来计算可以更直白
(7)
其中 是第i根连杆质心的高度
将等式(5)和等式(7)代入到等式(1),拉格朗日方程如等式(8)所示。
(8)
键合图的实施
为了完成起重机运动的动态方程,一种叫做IC场的特殊键合图被引入了进来。拉格朗日方程被写成了哈密顿形式。参照公式2,广义坐标是绞点角度 和绞点角速度 。将 分别定义为广义动量和广义力并且分别由流量 按照等式(9)和等式(10)给出。
(9)
(10)
拉格朗日方程(1)也可以被改写成如等式(11)所示的动量形式(哈密顿形式)。
(11)
使用IC场,键合图表示的哈密顿形式的拉格朗日方程如图2所示。
图2.拉格朗日方程的IC场表示法
对于折臂式起重机来说,用在IC场中的广义坐标是广义位移 ,比如角度。用广义动量 将拉格朗日方程改写为等式(12)和等式(13)。
(12)
(13)
其中 是惯性矩阵:
其中非零元素如下:
中的非零分量被写成了对应于惯性矩阵的克里斯托费尔符号:
其中
包括起重机重力和驱动力的外力被通过变压器(MTF-元素)的力源(Se元素和MSe元素)表示,对于绞点的重力变换矩阵如下所示:
如前所述,起重机通常由液压马达和液压缸驱动来实现更大的起升性能。为了将起重机的驱动器整合到模型中,我们可以假设相对于起重机本体的重量,驱动器本体的动态性能就可以忽略,但是驱动器的驱动力必须被转换。在第一个绞点处的马达转子容易通过施加一个齿轮比n来实现。图3展示了推导最后两个绞点的两个缸体的方程的图解。
图3.折臂式起重机的缸体
作为绞点角度函数的缸体长度通过等式(14)和等式(15)给出。
其中
(15)
其中
对于驱动器(马达和缸体)的转换矩阵如下所示
因此来自于包括重力的外力的绞点力矩能按等式(16)计算。
(16)
其中F是电机转子的矢量,气缸力以及重力。
钢丝绳和负载
在重型吊装作业中钢丝绳故障是最大的问题之一。在某一部分钢丝绳被反复启动和缩回的升沉补偿操作中,钢丝绳的磨损和疲劳尤其要被监测。软线模式并不像它看起来那样简单。为了我们的目的,针对一段钢丝绳的集成系统被定义并且由图4所示的弹簧阻尼系统表示。为了简化模型,钢丝绳总是被假定处于张紧状态。弹簧阻尼力的键合图实施是通过C元件电容和MR元件电阻表示。在[13]中,Skjong提出了一个用键合图表示的液压绞车模型。然而,钢丝绳和负载运动被限定在了一个二维平面内。在当前的研究中,在三维平面内的钢丝绳和摆动载荷与起重机模型一起开发和集成。
图4.集成钢丝绳和摆动载荷
弹簧阻尼力通过等式(17)给出。
(17)
钢丝绳刚度k通过等式(18)给出。
(18)
其中E是钢丝绳的弹性模量,A是钢丝绳横截面积,l是钢丝绳长度。根据DNV法规[14],如等式(19)所示,计算金属断面面积是通过一个因数f和总面积相乘。
(19)
如等式(20)所示,钢丝绳阻尼比 通过将一个临界阻尼比r作为一个比率来计算。
(20)
通过钢丝绳施加到起重机顶端的力由方程(21)给出。
(21)
其中F是起重机顶端的力矢,是沿着钢丝绳方向钢丝绳张紧力(假设钢丝绳总是处于张紧状态)。转换矩阵R如下:。
为了完成这个模型,一个MTF元件转换器被用来去连接钢丝绳和起重机,如公式(22)和公式(23)所示。
(22)
(23)
联系起重机顶端速度和起重机绞点速度的雅克比矩阵如下所示。
图5表示出了一个折臂起重机起升系统的集成模型。输入控制信号从计算机的键盘上滤波(信号处理)。这个驱动器的驱动力被PID回路(PID执行器)中的调幅力来源(MSe元素)表示。绞点的弹簧和阻尼被看做并且分别由C元素(绞点弹簧)和R元素(绞点阻尼)表示。负载的位置由它的速度积分计算所得(获得位置)。
图5.带有摆动载荷的三自由度折臂式起重机的键合图模型
仿真结果与讨论
使用动态模型,起重
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148813],资料为PDF文档或Word文档,PDF文档可免费转换为Word

