英语原文共 10 页
嵌入式关节执行器的关节机器人臂的建模与控制
摘要:人类合作型机器人(HCR)在工业上的应用越来越广泛,对其制造的经济性也提出了更高的要求。由于UR5机器人只使用三种不同尺寸和功率的共结构旋转关节执行机构,使得这种机器人成为著名的性价比高的HCR。UR5型HCR的嵌入式旋转关节执行器被称为“智能执行器”,因为只有将其与连杆连接起来,才成为6自由度的机器人机械手。近年来随着EtherCAT通信的网络化电机驱动技术的发展,使得机械手的连接和操作变得更加容易。关于UR5的正运动学和逆运动学的分析在很多文献中都有。通过这些材料,本文对UR5机器人智能执行机构进行了动态仿真,使用Matlab / Simulink和Simscape Multibody对电机驱动和机械手动力学进行了联合仿真。结果表明,所研制的智能执行机构可以很好地替代UR5机器人的关节执行机构。
关键词:旋转关节执行器;智能执行器;铰接式机器人手臂;simscape多体;UR5机器人。
一 介绍
近年来,许多人类合作型机器人(HCR)的机械手被开发和商业化,这些机器人操纵器需要有轻巧灵敏的配置。来自通用机器人公司的UR5机器人是一款知名的HCR机器人。在机器人工业中,机械手的制造成本越来越重要。因此,模块化设计和制造方案应运而生,利用嵌入式控制器控制连杆的旋转关节执行器模块是智能执行器的基本思想。6个独立模块相互串联,组成6自由度机器人机械手,这意味着6个独立的智能执行机构是6自由度铰接机器人的基本模块。韩国研制了一种采用EtherCAT通信协议的智能驱动器,这种驱动器的电机的设计和智能执行机构控制算法的验证是本文的主要目的。为此,本文简要介绍了UR5型HCR机械手的运动学、逆运动学和建模,电机的设计及其参数在第三章有说明。在智能执行机构的机械部件Simscape多体模型中开发了具有代表性的DH连接模块,在Simulink模型中开发了位置控制永磁同步电机(PMSM)伺服驱动算法。第四章给出了它们的仿真方法,第五章给出了智能执行器模型的最终描述和未来的工作。
二 UR5型铰接式机器人手臂
UR5型铰接机器人手臂的开发只需要3个不同尺寸和功率的旋转嵌入式关节执行器,其中具有网络化控制功能的嵌入式旋转关节执行器称为智能执行器[1][2]。
- UR5机器人的原理图和框架分配
UR5的一个主要的特点是它的最后三个关节不像传统的斯坦福机械手(如美洲豹机器人)那样作为一个巧合的手腕,因此,其所有六个关节都有助于其末端执行器的转换和旋转运动。这一特点使其运动学分析相对于其他腕部重合的机械手更为复杂。最近对UR5的正、逆运动学进行了分析,得到了一些完整的UR5的Matlab模型,可以在[4]~[7]中获取。
图1 UR5的原理图和框架分配,重回形式[4]
- UR5机器人的运动参数
在图1中,给出了UR5机器人手臂的示意图以及各关节框架的配置。具体关节坐标系下UR5的DH参数如表I所示,由[4]和[5]给出。
表1 UR5的DH参数
- UR5机器人的正逆运动学
根据机械臂变换矩阵[3]的定义,从基面到末端执行器的变换矩阵为:
0Tn= (1)
那么机器人位置的正运动学很容易从1的n的第四列中得到:
p= T (2)
对于逆运动学,为了满足最后一个连杆的期望位置和方向,我们可以得到关节构型的集合Q=qi=[theta;1,hellip;,theta;6] isin;[0,2pi;]。反运动学的推导在[7]中给出。
三 HCR智能执行机构的设计
智能执行器是铰链式机器人手臂的嵌入式关节执行器,其中使用了6个旋转关节执行器。“智能执行器”由电机/齿轮/编码器/放大器/控制器/数字通信板组成,位于执行模块[1]的框架内。我们的智能驱动器的原型也由这些组件组成。图2为智能执行机构的概念配置。
图2执行机构的配置及其主要部件
A 电机和齿轮
电动机,也就是所谓的“马达”,是根据HCR的每个接头的要求性能而研制出来的。在[2]中给出了有效载荷为10千克的系统的电机设计过程。本研究采用相同的方法设计制作了功率分别为60W、120W、300W的电动机。图3为UR5基本模块执行器典型模型300W电机的配置示意图。电动机是永磁式无框架同步电动机,根据电动机的种类而定。很快它就可以称为永磁同步电动机了。附加的齿轮传动比是101:1。
图3 无框电机配置及其定子图
B 电动机设计
永磁同步电动机用于这个应用程序是因为它具有效率高、转矩密度大等优点。对于这个10级电机,由于齿槽转矩比其他组合小,所以选择了12个槽。UR5基本模块设计模型的详细规格如表2所示。
表2 电机规格
四 智能执行机构的建模与控制
在Matlab / Simulink环境下,对智能执行机构的机械手动力学和电机控制动力学进行了联合仿真。在Simscape多体模型中实现了机器人的机械手,在Simulink模型中实现了对永磁同步电动机的控制。
A 机械手模型
对于任何Simscape多体模型开发都需要使用以下三个基本块,它们是求解器、世界框架和机制配置块。这些块定义了系统的环境(世界)及其属性,如重力常数和方向,然后在限制环境框架后立即定义机器人的·基础。为了开发UR5机器人的Simscape多体模型,表I的DH参数作为模型的几何规格。然后利用UR5数据对机器人连杆和关节各部分的质量、质心(COM)和惯性张量进行分配。在Simscape多体模型中,各部分质心应该表示在主体几何中心(COG)的框架中。这与DH参数得到的质心是不同的,因为基于DH参数的质心通常在关节坐标系中表示。因此,在Simscape多体模型开发中仅使用刚性变换和图形来满足关节的DH参数和几何要求。但是对于各部分质心的赋值,其从关节框架到位于机体轮齿的框架的变换都是通过刚性变换来完成的。在之后的Simscape多体模型开发中,用实体模型分配质量和惯性张量。在这一转变之后,运用了多体系统模型的概念多体环境的模型,UR5机器人的控制模型被开发出来了。
智能致动器可以表示为D-H代表性连杆,因为在具有所有旋转接头(如铰接式机器人)的六关节机器人的情况下,18个参数是6组(ai,ai,di)的形式。最后将Simscape多体模型中的机器人手臂模型表示为智能执行器的串联。基于D-H表示的第i-1个节点与第i个节点的几何关系如图5所示。图中用“齿轮比”的恒定增益表示齿轮的输入和输出的差值。
图4 关节机器人臂的Simscape多体模型
图5 d - h代表1个环节和联合实现器
B 永磁同步电动机及其伺服控制模型
智能执行器控制每个接头的角度,以实现正确的机械手操作。驱动智能执行器可以看作是永磁同步电机的位置伺服控制。整体永磁同步电动机控制块如图6所示。通过EtherCAT通信,智能执行机构执行循环同步位置指令作为位置伺服控制器。
图6 永磁同步电动机及其伺服控制模型
C 协同仿真实现
如图所示,图7为整体智能执行器模型,其中永磁同步电动机的D-H代表连杆(lsquo;DH连杆rsquo;)和伺服控制系统与高增益齿轮耦合。本文利用该模型对UR5机器人进行了整体仿真。
图7 由D-H链路和永磁同步电机伺服控制相结合的智能执行器模型
D 联合仿真结果
利用上述控制器和设备模型,在Simscape多体模型中对UR5机器人进行了仿真。模拟结果和视频片段将在演示中展示,另外,UR5操纵器对关节角度命令的情形简要地显示在图8中。
图8 根据关节角度确定的UR5机械手的姿态
五 结语
智能执行器是铰链式机器人手臂的嵌入式关节执行器,其中使用了6个旋转关节执行器。UR5机器人是铰链式机器人的一个典范,作为一种出众的人类合作型机器人,其运动学和动力学参数易于获取。对于UR5型HCR智能执行器的开发,规范草案的计算是非常重要的。智能执行器模型作为电机驱动系统和机械动力系统的接口,在Simulink中开发了电机驱动系统,在Simscape多体中建立了机器人的机械手模型,使得其整体动态性能和可视性降低。下一步是利用TwinCAT3软件包中的可编程逻辑控制器等实时控制器实现控制算法。
致谢
本研究由韩国电子技术研究院(KERI)基础研究项目资助,国家科学技术研究委员会(NST)资助,科技部(MSIT)资助(No. 18-12-N0101-25)。
参考文献
【1】 C. Park, J. H. Kyung, and T.-Y. Choi, “Design of a human-robot cooperative robot manipulator using SMART actuators,” in Proc. Int. Conf. Control, Autom. Syst., Oct. 2011, pp. 1868–1870.
【2】 D. Hong, W.Hwang, J. Lee, and B. Woo, “Design, analysis, and experimental validation of a permanent magnet synchronous motor for articulated robot application,” IEEE Trans. On Magnetics, vol.54, no.3, March 2018.
【3】J.J. Craig “Introduction to robotics: mechanics and control, volume3”, Pearson/Prentice Hall Upper Saddle River, NJ, USA, 2005.
【4】 P.M. Kebria, S. Al-Wais, H. Abdi and S. Nahavandi, “Kinematic and Dynamic Modelling of UR5 Manipulator” In Systems, Man, and Cybernetics(SMC), 2016 IEEE International Conference on, pages 4229–4234. IEEE.
【5】 R. Keating, “ Analytic inverse kinematics for the universal robots ur5/ur-10 arms”, Technical report, John Hopkins. 2017. Available at: https://www.slideshare.net/RyanKeating13/ur5-ik.
【6】 http://rasmusan.blog.aau.dk/files/ur5_kinematics.pdf
【7】 K.P. Hawkins, “Analytic inverse kinematics for the universal robots ur5/ur-10 arms”, Technical report, Georgia Institute of Technology, 2013. Available at: https://smartech.gatech.edu/bitstream/handle/1853/50782 /ur_kin_tech_report_1.pdf
2014年IEEE会议记录
机电一体化与自动化国际会议
8月3 - 6日,中国天津
双臂机器人模块化关节的设计与误差分析
李龙坊,中国科学技术大学,精密机械与精密仪器学系,中国安徽省合肥市,230027 fxuefeng@mail.ustc.edu.cn
罗敏洲、陈坚、王鹏程,虚拟样机实验室,先进制造技术研究所,中国江苏省常州市,213164 lmz@iim.ac.cn
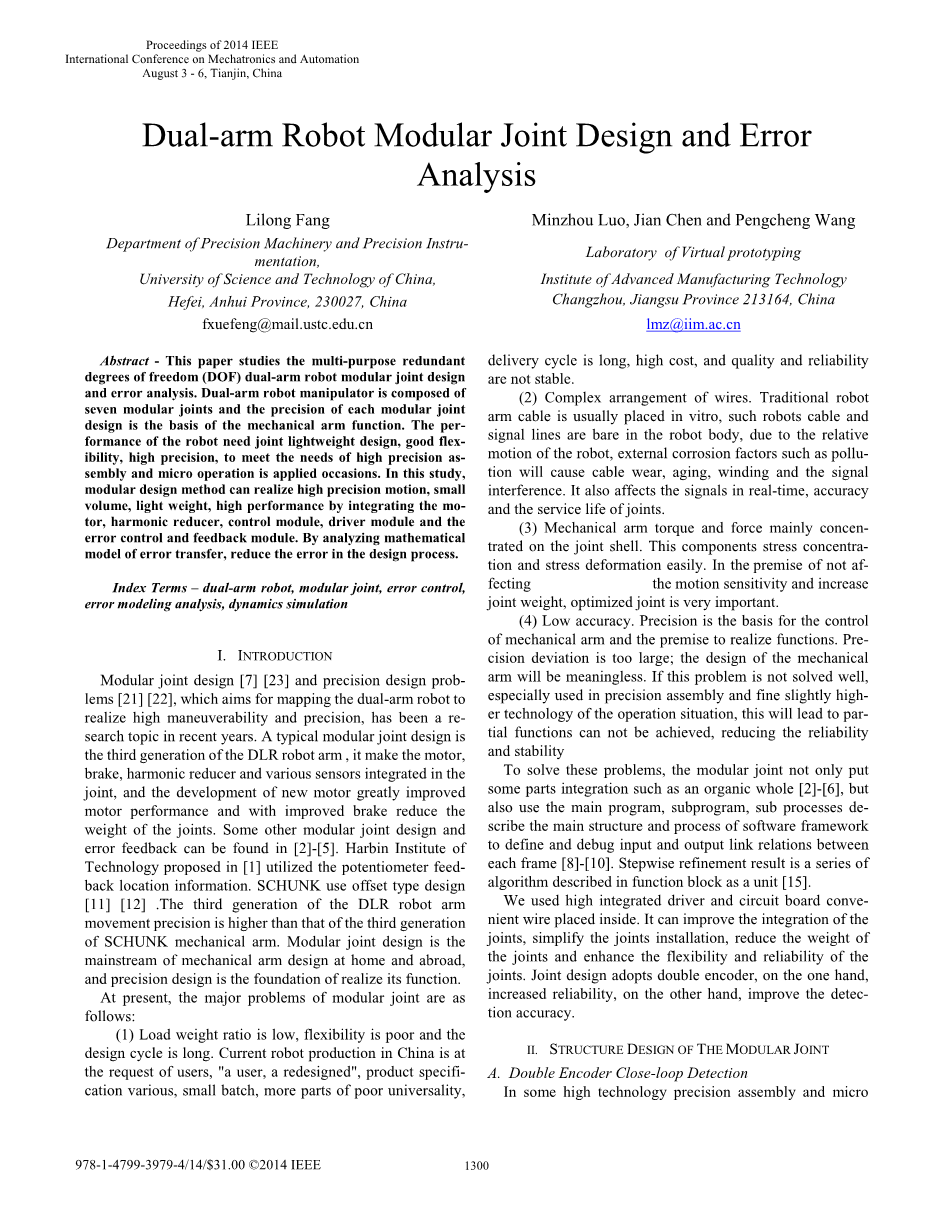
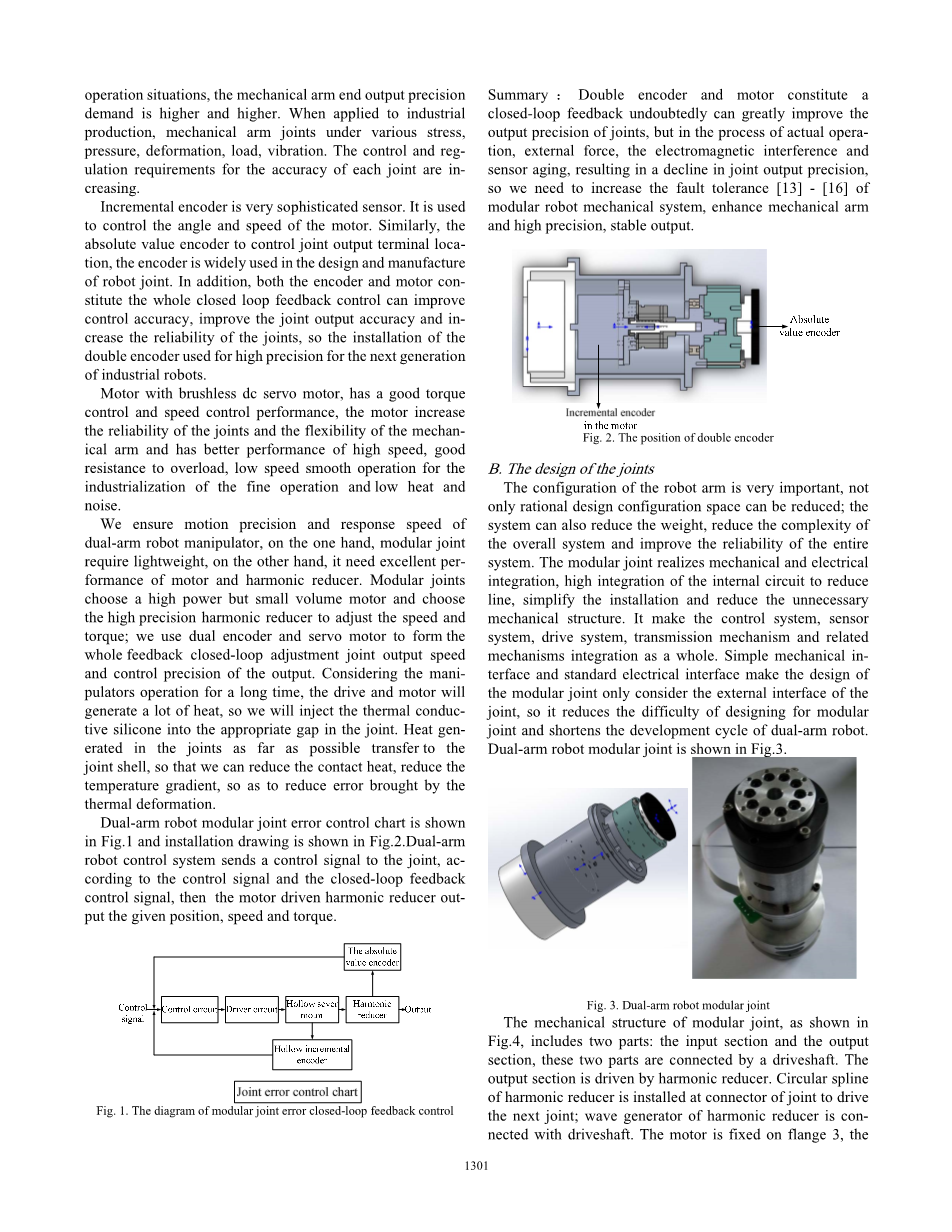
摘要:本文研究了多用途冗余自由度(DOF)双臂机器人模块化关节的设计与误差分析。双臂机器人机械手是由七个模块化关节组成,每个模块化关节的精度设计是机械臂功能的基础。该机器人的性能要求关节设计轻巧、灵活性好、精度高,满足高精
资料编号:[4837]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

