英语原文共 13 页,支付完成后下载完整资料
确保移动式起重机的接地稳定性自动设计算法
Donghoon Lee,Jun Young Park,Jongkwan Ho和Sunkuk KimEmail的作者
工程可视化20142:7
https://doi.org/10.1186/s40327-014-0007-xs Lee等人;持牌人施普林格。 2014
收稿日期:2013年12月30日截止日期:2014年6月7日出版日期:2014年9月4日
摘要
背景:移动式起重机因过度提升,大风或未确保适当的地面接触压力而翻倒。通过检查提升时从支腿传递到地面的力以及土壤承载力,可以防止这种事故。移动式起重机翻车的稳定性评估分为以下几个阶段:检查起重条件,移动式起重机选择和检查地面接触稳定性。然而,对地面接触稳定性的精确审查需要专业知识并且非常耗时。因此,本研究开发了自动设计算法,以确保移动式起重机的地面稳定性,从而实现简便快速的稳定性评估。
方法:结合提出的概念过程创建稳定性评估方法和算法模型。本研究中提出的算法对所有可能的候选案例进行模拟,将结果保存在数据库中,查看实际的备选方案,并选择最小化成本的解决方案。为了验证自动设计模型的有效性,选择了案例项目,并假设几个条件应用算法。
结果:开发的算法可以根据提升条件选择候选起重机,并通过模拟轻松快速地设计板材,并收集接地板设计所需的设计组件,以构建数据库,从而更容易,更快速地进行稳定性审查。
结论:本研究中提出的算法对所有可能的候选案例进行模拟,将结果保存在数据库中,查看实际的备选方案,并选择最小化成本的解决方案。开发的过程可用于分析移动式起重机性能,地面接触和土壤承载力加固设计等的相关性,以及系统地选择最佳移动式起重机。
关键词:移动式起重机;稳定性;提升计划;接地压力;自动设计模型
1背景
全球范围内发生了许多起重机事故,包括普吉岛,泰国和英国的移动式起重机的翻倒(The Vertikal Press [2014])。随着韩国起重机使用量的增加,翻车事故的数量逐渐增加,与移动式起重机相关的事故占所有起重机事故的约61.4%(Kim和Lee [2007])。由于过度提升,大风或不能确保适当的地面接触压力,移动式起重机的倾覆发生。通过检查在提升时从支腿传递到地面的力和土壤承载力,可以最小化这种事故。移动式起重机翻车的稳定性评估分为以下几个阶段:检查提升条件,移动式起重机选择和审查地面接触稳定性。为了安全操作,需要逐步审查。
应对预先确定稳定性,并且考虑到成本或其他因素,在已完成审查的候选起重机中选择移动式起重机是合理的。但是,在实施建设项目时,工程师或技术人员不制定适合稳定性分析施工条件的提升计划;相反,设备基于设备供应商提供的信息进行操作。依靠这种有限的信息和经验的行动是起重机灾难的根本原因([Ho,Han和Kim 2007])。此外,由于这种方法无法精确检查移动式起重机和工作条件,因此很难选择最佳的移动式起重机。
阻止工程师或技术人员设置详细的移动计划有两个因素。首先,考虑应用于移动式起重机的地面接触稳定性是困难且极其耗时的。其次,没有足够的系统技术来分析大量数据以进行候选人的稳定性审查。以前的研究调查了最佳起重机的选择,考虑到移动式起重机和运输路线的提升能力(Reddy和Koshy [2002]; Al-Hussein等人[2001]; Tantisevi和Burcu [2007]) 。然而,之前的研究并未包括详细的稳定性评估,如土壤承载力和地面加固。因此,本研究旨在超越以往研究的极限,开发自动设计算法,以确保移动式起重机的地面接触稳定性。本研究中提出的算法侧重于移动式起重机的地面稳定性评估过程。
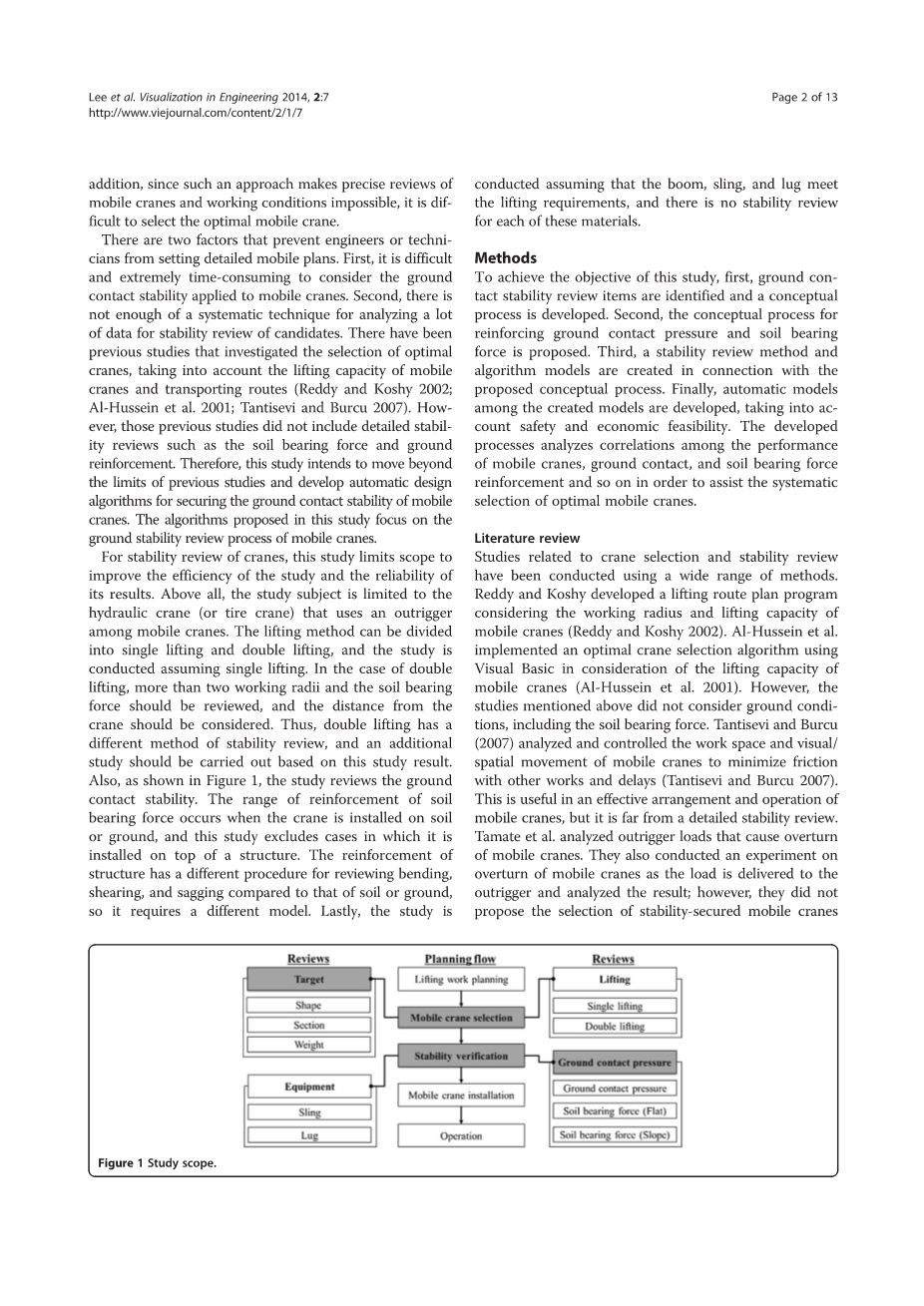
对于起重机的稳定性评估,本研究限制了范围,以提高研究的效率和结果的可靠性。最重要的是,研究主题仅限于在移动式起重机中使用支腿的液压起重机(或轮胎起重机)。提升方法可分为单提升和双提升,研究采用单提升方式进行。在双提升的情况下,应检查两个以上的工作半径和土壤承载力,并应考虑与起重机的距离。因此,双重提升具有不同的稳定性评估方法,并且应该基于该研究结果进行另外的研究。此外,如图1所示,该研究回顾了地面接触稳定性。当起重机安装在土壤或地面上时,土壤支承力的增强范围发生,本研究不包括将其安装在结构顶部的情况。与土壤或地面相比,结构的加固有不同的程序来检查弯曲,剪切和下垂,因此需要不同的模型。最后,该研究是在假设吊杆,吊索和吊耳满足提升要求的情况下进行的,并且没有对这些材料进行稳定性评估。
2方法
为了实现本研究的目标,首先,确定地面接触稳定性审查项目并制定概念过程。 其次,提出了增强地面接触压力和土壤承载力的概念过程。 第三,结合提出的概念过程创建稳定性评审方法和算法模型。 最后,考虑到安全性和经济可行性,开发了所创建模型中的自动模型。 开发的过程分析了移动式起重机,地面接触和土壤承载力增强等性能之间的相互关系,以帮助系统选择最佳移动式起重机。
2.1文献综述
已经使用多种方法进行了与起重机选择和稳定性评估相关的研究。考虑到移动式起重机的工作半径和提升能力,Reddy和Koshy制定了提升路线计划(Reddy和Koshy [2002])。 Al-Hussein等人。考虑到移动式起重机的提升能力,使用Visual Basic实现了最佳起重机选择算法(Al-Hussein等人[2001])。但是,上述研究没有考虑地面条件,包括土壤承载力。 Tantisevi和Burcu([2007])分析并控制了移动式起重机的工作空间和视觉/空间运动,以最大限度地减少与其他工作的摩擦和延误(Tantisevi和Burcu [2007])。这对移动式起重机的有效布置和操作很有用,但它远非详细的稳定性评估。 Tamate等人。分析了导致移动式起重机翻倒的支腿载荷。他们还进行了一项关于移动式起重机翻转的实验,因为负载被输送到支腿并分析结果;然而,他们没有提出像这项研究那样选择稳定性安全的移动式起重机和板设计算法(Tamate等人[2005])。 Shapira等人。考虑了建筑项目的特点,并进行了选择移动式起重机或塔式起重机是否最合适的研究。此外,分析了在选择详细模型(建筑物,场地,安全,空气,天气等)时要考虑的项目,以确定每个项目的重要性(Shapira和Schexnayder [1999])。但是,对于所考虑的项目,没有稳定性审查或选择程序。 Alkass和Osama开发了一个模拟程序,通过使用数据库管理,电子表格应用程序,图形和模拟等工具来选择起重机(Al-Hussein等人[1997])。同样,Strukovaacute;和Iscaron;tvaacute;nik开发了一个程序,根据提升位置,重量和建筑形状选择移动式起重机的最佳位置(Strukovaacute;和Iscaron;tvaacute;nik[2011])。然而,对于土壤承载力的稳定性还没有足够详细的评论,该计划旨在选择起重机,考虑到重量,高度和建筑形状等提升条件。
Furusaka和Gray使用目标函数来最小化租赁,安装和断开成本,以选择最佳起重机,提出一个结合了各种塔式起重机的模型(Furusaka和Gray [1984])。然而,他们的建议不是对移动式起重机的稳定性评估。 Gray和Little建议在初始设计阶段选择适合设计的移动式起重机和塔式起重机(Gray and Little [1985])。但是,没有方法可以检查所选起重机的稳定性或使用市场上可用的起重机信息。阿里等人。研究了移动式起重机双重提升时的避碰问题,Perez等人。开发了一种用于规划多面体障碍物之间无碰撞路径的算法(Lozano-Peacute;rez和Wesley [1979])。其他研究包括由Maczynski和Wojciech进行的研究,他们开发了旋转部件的3D优化算法以确保移动式起重机的刚性(Maczynski和Wojciech [2003]),以及Lin和Haas([1996]),他们开发了双提升模拟程序(Lin and Haas [1996])。这些研究没有考虑移动式起重机的地面接触稳定性。最后,Ho等人。研究了一种检查移动式起重机地面接触稳定性的方法,但只解释了主要项目并提出了一个公式(缺乏详细的审查项目和程序),并没有提出自动模型([Ho,Seo和Kim 2007])。因此,本研究提出了有关地面接触稳定性的详细审查项目和程序,以确保移动式起重机的稳定性,并开发了一种自动模型。
2.2回顾地面接触稳定性的评价过程
表1显示了用于确保移动式起重机的地面稳定性的自动设计算法的审查项目。审查项目分为对待提升物体的审查,设备信息,地面接触压力的审查以及平坦和倾斜场地土壤承载力的加固。在检查地面接触压力时,计算外伸支架的最大反应以检查稳定性并识别可用的移动式起重机。选择移动式起重机时,根据地面形状评估土壤承载力的加固。在板式(钢,木材)所示的平地土承载力加固规划中,应考察板的刚度,土的承载力,弯矩和作用在板上的剪切力。在对坡面土承载力进行加固规划时,应另外检查坡面角度,坡角,坡面高度,土壤分布荷载等坡度数据,设计板材。这里根据起重机类型和基态设计最佳板。
图2显示了地面接触稳定性审查过程。 起重机操作计划分为审查提升条件,移动式起重机选择和审查地面接触稳定性。 在检查提升条件时,应检查提升物体的形状,截面和重量。
2.3自动审查和设计算法
起重机选型基本信息综述
起重方案和起重机选择具有复杂,动态的相关性,因此影响因素不仅包括施工管理的持续时间和成本,还包括工作半径,工作效率,对附近建筑物的干扰和其他工程,数量,位置选择,现场安装和断开连接,所有这些都应该考虑在内(Lin和Haas [1996])。考虑到这些因素选择最佳移动式起重机,并且应按顺序逐步设定相应的计划。
对于移动式起重机的稳定性评估,应检查起重物体的特性和高度以及与起重机的距离,如图3所示。待提升物体的特征是指形状,重量和材料,以及起重机特性表示起重臂的起重能力,可用起升高度和转弯半径。选择起重机或起重机时应考虑这些基本因素,不满足给定因素的起重机不在分析范围内。此外,应根据这些因素检查地面接触稳定性,以防止移动式起重机翻倒。
2.4检查地面接触压力
如图4所示,本研究的地面接触模型根据动臂位置(A,B,C)计算最大地面接触载荷。 当动臂处于B点时,最大反应在悬臂梁处。然而,这不能被视为实现最大反应的点,因为B不是工件的主要位置,而是临时旋转和通过的地方 被证明了。 因此,当动臂位于A(工作的主要位置)时,它被认为是最大反应。 此外,考虑到吊臂在B处旋转,应增加50%的最大反作用力以进行安全设计([Ho,Seo和Kim 2007])。 公式如公式1和2所示。
当不考虑冲击载荷时:
Pmax = 0.85times;(W W1)times;0.5times;1.5(1)
其中Pmax是最大反应,W是起重机重量,W1是提升重量。
当考虑冲击载荷时:
Pmax = 0.85times;{(W W1)times;1.3}times;0.5times;1.5(2)
图5显示了地面接触稳定性审查过程。起重机操作计划分为审查提升条件,移动式起重机选择和审查地面接触稳定性。在检查提升条件时,应检查提升物体的形状,截面和重量。然后在选择移动式起重机时,检查外伸支架的地面接触压力以及提升条件。这是本研究中提出的模拟1。在回顾地面接触稳定性时,根据模拟结果评估土壤承载力。土壤承载力分别由平坦和倾斜场地进行评估,每个过程分别按照模拟2和3进行开发。
用于地面接触稳定性稳定性评估的生成模型使用起重机制造商提供的规范和项目信息。 工程师和技术人员应设置项目信息,如图6所示,并从已经实施的数据中自动导入起重机信息。 可以根据支腿跨度,动臂转弯半径,车身重量和提升重量来检查地面接触压力。
设计了地面接触稳定性自动稳定性评估的仿真模型,以检查所有MC。 如图7所示,仿真模型设置所有MC的安装位置,并通过图7所示的仿真算法自动检查地面接触压力。
地面接触压力按照支腿的最大反作用力,工作方向和高度以及冲击载荷的顺序进行评估。通过与地面条件的比较,评估的冲击载荷值显示稳定性。被认为是稳定的起重机被自动分类并作为候选起重机保存。当所有起重机都经过审查后,检查地面接触压力的模拟结束。
2.5加固土壤承载力(平地)
在审查地面承包压力后,应审查土壤承载力加固的稳定性,以防止翻车。在2种不同的地面条件下评估土壤承载力的加固:平坦和倾斜的位置。对于平坦的场地,板材,厚度和面积应由用户手动检查,如图8所示,或由模拟算法自动检查,如图9所示。由于板将支腿的地面接触载荷转移到在检查粘合力和板的刚性后,应设计地面。该板通常由木材和钢制成,应收集根据厚度和面积进行弯曲和剪切的数据,以自动应用于模拟。
如图10所示,除了表1中规定的基本信息之外,作为板加固的土壤承载力增强的生成模型输入了由所提出的算法实施的系统中存储的外伸支架的地面接触压力的附加数据。基于这些数据, 自动检查板型,刚度,承载力,弯曲和剪切因素,以加强土的承载力。 当板不能将地面接触载荷传递到地面时,起重机很可能会翻倒。 对于坡度,还应检查土壤类型,土壤性质值和坡度信息。 当完成所有项目的稳定性评估后,起重机和合适的板设计成对保存。
用于在平坦场地上加固土壤承载力的自动板设计应用如图7中所示的从模拟1中抽出的候选起重机的支腿和体重的信息。对于模拟2中的板设计,选择如图9所示的起重机的支腿,并检查板材和允许的土壤承载力以确定材料的设计。设计的板和起重机在稳定性确保的范围内成对保存。当审查从模拟1推导出的所有候选起重机时,完成模拟2。
如图11所示,该程序自动检查平板设计,以增强平坦场地上的土壤承载力。根据收集的数据导入板的类型和尺寸刚度,并根据模拟结果1插入支腿的最大地面接触载荷。此外
资料编号:[3174]

