
英语原文共 8 页,支付完成后下载完整资料
门式起重机梁在荷载作用下的挠度建模
Christoph Holst1; Martin Burghof2; and Heiner Kuhlmann3
摘要:龙门吊装卸集装箱船上的集装箱。为了确保安全和运行,应对受载主梁的变形进行分析。这一变形取决于装载集装箱的重量以及移动集装箱的轨道的位置。在本研究中,我们建立了一个二元多项式模型来估计基于这两个输入的偏差。该二维荷载相关模型分四步展开,以确定弯曲的形状(取决于小车位置)和最大幅度(取决于集装箱重量)。特定的起重机轨道由若干个传感器监控,其中有观察起重机主梁倾斜的小型测斜仪传感器和两个测速仪。观察小车位置和绝对偏转。通过收集18次装载操作的数据,估计了偏差模型的参数。根据这些数据,根据集装箱重量和小车位置,处理了偏差和装载量。整个模型的验证表明,与独立加载操作相比,64mm内的偏差。对于所使用的测量,此偏差是可接受的。DOI: 10.1061/(ASCE) SU.1943-5428.0000116. copy; 2014 American Society of Civil Engineers.
关键词:门式起重机;梁挠度;二元多项式;变形分析。
简介和背景
门式起重机由于其在装载过程中的永久性,会受到老化过程的影响。为了确保安全和连续运行,应定期监测其主梁在装载过程中的变形。在当前的研究中,建立了一个数学模型,该模型估计了两个输入端的梁的横向位置:承载荷载的小车的纵向位置和荷载的重量。
在这里,龙门起重机纵向弯曲的形状以及幅度是很重要的。这些目标变量的精度应为几毫米。
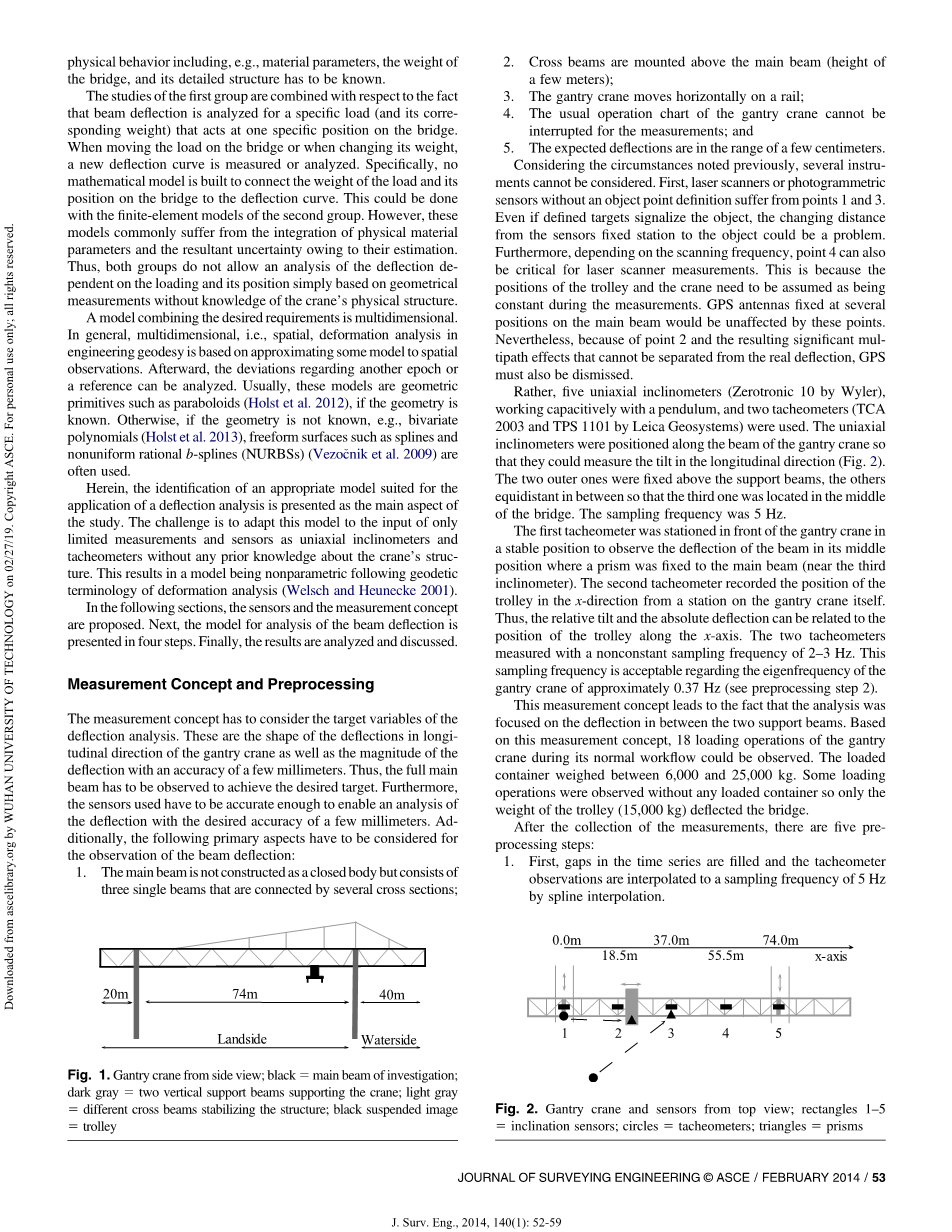
本次勘察的龙门吊长134m(见图1),两个(支撑)梁对其中的梁进行了错撑,这种结构形式不存在简单的梁支撑,悬臂不对称,一侧为20m,另一侧为40m。远光灯不是封闭式车身,而是由三个由多个交叉部分连接的单梁组成。远光灯顶部的横梁也是不对称安装的。对称结构类型与起重机的功能有关:从集装箱船上装载和卸载集装箱。货物在较长的悬挑处从船上装载,移动到桥的中间位置,并放置在卡车上。此外,支撑梁安装在轨道上,因此门式起重机可以水平移动,并垂直于其纵轴。
在此背景下,即使装载的小车位于两个支撑梁的中间,也不会预期其弯曲对称。相反,整个光束的偏转被认为是不对称的,因此对小车的位置非常敏感。在建立一个模型来估计偏差时,必须考虑这一点。
波束反射分析是由悬臂梁和悬臂梁组成的,在迭代过程中分布广泛。相关研究开始集中于传感器和处理技术,以高精度、高精度和高空间分辨率测量和分析反射。第二组研究将包括建立新模型或实施现有模型,以数学和物理方式描述桥梁的弯曲。
在第一组研究中,一些有希望的方法是,例如数字图像相关性(Yoneyamaetal.2007)或采样莫尔法(Ri等人2012)。此外,光栅涡流传感器(L_et al.或测距摄像机(Lichti等人2012年)。他们声称获得比全站仪、百分表或激光位移计更好的结果。不考虑这些研究,激光扫描仪测量光束偏转也是数字摄影测量或其他技术的一种常见替代方法(GordonandLichti2007)。因此,对精度和空间分辨率的益处在几项研究中显示(R_nnholm等人2009年;Lee和Park,2011年)。而其他的研究则将多传感器系统安装在多个输入端(如风、交通或温度)上,以监测其完整性(Wegner等人2006年;Bogusz等人2012)。例如,这里使用全球定位系统(GPS)、加速度计和测斜仪。
在第二组中,通常将有限元模型视为Tomodelthebridge(Gerdemeli等人。2010年;Pinca等人。2009)。在此基础上,可以分析桥梁结构的强度(Pinca等人2010)。这种强度随着时间和使用而降低,正如在钢筋混凝土梁的长期性能分析中可以看到的那样(Seidel2009)。此外,采用灵敏度分析法对门式起重机的安全性进行了分析(Castillo等人2003)优化其设计(Castillo等人2008)。组装模型主要基于描述物理参数,如桥梁应力。因此,必须了解物理行为,包括材料参数、桥梁重量及其详细结构。
根据梁弯曲的作用,分析了在桥梁上一个特定位置上作用的特定荷载(及其相应的重量)下组合的fiftgroup的声音。当移动桥梁上的荷载或改变其重量时,测量或分析一条新的挠度曲线。具体来说,没有建立数学模型来将荷载的重量及其在桥梁上的位置连接到反弯曲线上。这可以通过第二组的有限元模型来实现。但是,这些模型通常会受到物理材料参数的集成以及由于其估计而产生的不确定性的影响。因此,这两组不允许在不知道起重机物理结构的情况下,分析取决于负载和位置的偏差,从而实施基于地理测量的测量。
设计要求的组合是多维的。一般来说,工程大地测量中的多维(即空间、变形分析)是建立在对空间观测的局部模型的近似基础上的。然后,可以分析与另一个时代或参考的偏差。通常,这些模型是几何基本体,如抛物面(Holst等人2012年),如果几何图形已知。否则,如果不知道几何结构,例如双变量多项式(Holstetal.2013)、自由曲面UChasspline和非均匀有理B样条(Nurbss)(Vezocnik等人2009)经常使用。
在本文中,对适合应用缺陷分析的适当模型的识别是本研究的主要方面。面临的挑战是,在不了解起重机结构的情况下,仅将有限的测量和传感器作为单轴测斜仪和测速仪输入该模型。根据变形分析的大地测量术语(Welsch和Heunecke,2001),这导致了一个非参数模型。在以下章节中,提出了传感器和测量概念。其次,提出了梁弯曲分析的四步模型,并对结果进行了分析和讨论。
测量概念与预处理
测量概念是为了了解偏差分析的目标变量。这些是门式起重机纵向偏转的形状,以及用无事故频率计测量的偏转幅度。因此,必须观察整个主梁以达到所需目标。此外,这些传感器还能够以几毫米的期望精度对偏差进行有效的分析。此外,必须考虑以下主要方面,以便观察梁的挠度:
- 主梁未封闭,由三根单梁组成,由多个横截面连接;
2.横梁安装在主梁上方(高度几米);
3.门式起重机在轨道上水平移动;
4.门式起重机的常规操作图不能因测量而中断;
5.预期偏差在2英尺范围内。
考虑到前面提到的情况,一些仪器不能被考虑。首先,激光扫描者可以对测量传感器进行变形,而不需要从1点和3点定义目标点。即使未定义的目标发出目标信号,从传感器固定站到目标的距离变化也可能是一个问题。此外,根据扫描频率,点4分析对于激光扫描仪测量至关重要。这是因为在测量过程中,小车和起重机的位置需要假设为恒定的。固定在远光灯几个位置的GPS天线不会受到这些点的影响。然而,由于第2点和由此产生的明显的多径效应不能与实际的偏转分开,GPS也必须被排除。
相反,使用了五个单轴测斜仪(Wyler的Zerotronic 10)、电容式测斜仪和两个测斜仪(Leica Geosystems的TCA 2003和TPS 1101)。单轴测斜仪位于起重机臂的一侧,可以测量纵向(图2)。两个外梁固定在支撑梁的上方,其他两个梁的间距相等,使得第三道位于桥的中间。采样频率为5赫兹。
固定在起重机前方的固定位置上的仪器,用于观察光束在中间位置的偏转,其中棱镜固定在远光灯上(靠近第三个倾斜仪)。第二个测速仪记录了从龙门起重机上的一个站到小车X方向的位置。因此,相对的倾斜度和相对的倾斜度与小车沿X轴的位置一致。以2–3赫兹的非恒定采样频率测量的两个测速仪。此采样频率可接受约0.37 Hz的门式起重机的能量频率(见预处理步骤2)。
这一测量概念导致了这样一个事实:分析的重点是两个支撑梁之间的偏转。基于此测量概念,可以观察到门式起重机在其正常工作流程中的18次装载操作。装载的集装箱重量在6000到25000公斤之间。在没有任何装载集装箱的情况下观察到一些装载操作,因此只有小车(15000 kg)的重量会影响桥梁。
收集测量值后,有五个预处理步骤:
- 首先,确定时间序列中的间隙,并通过样条插值将测速仪观测值插值为5Hz的采样频率。
2.其次,通过对测量的时间序列进行频率分析,可以检测出GantryCranne的固有频率,大约为0.37赫兹。振荡是通过移动轨道和容器的充电和放电开始的。图3和图4显示了一个倾斜传感器一次特定加载操作的时间序列,以及用测速仪测量的桥梁中部高度。
3.为了获得不受振荡影响的偏转或倾斜,应分别对仪表的固有频率进行修改。这在第三个预处理步骤中通过移动平均值完成(另请参见图3和4)。移动平均值的长度由采样频率和固有频率的商计算。采样频率为5赫兹,特征频率为0.37赫兹,长度等于~13。由于该长度只是一个近似值,因此最终应在每个时间序列中处理一次以上的过滤。
4. 第四步确定所有18次装载操作所覆盖的无轨电车位置,无需任何一次装载作为参考。所有时间序列都是关于它们的时间起点的参考。此外,相对观测值在这一点上被重新设置。从这一点来看,在预处理后,模型中集成的观测值与此参考值是不同的。
5. 在第五步中,测量值最终同步。之后,它们将被整合到下面一节中的影响模型中。
荷载作用下梁的挠度分析
讨论的测量方法是建立变形分析的数学模型。该模型应能预测龙门起重机梁在任何位置的偏转,该位置取决于两点:轨道位置和容器重量。目标变量是偏转的形状及其大小,应以几毫米的精度估计。
关于变形模型的特征和分类(Welschandheuneck2001),提议是一个静态模型,即不包括时间分量,并且影响区域功能制造力重复输入模型。根据所调查的观测结果,不需要将可能的蠕变整合到模型中,这一点适用于可能的转变。该模型分四步开发:
步骤1:使用一维(1d)多项式描述每个独立装载操作的梁偏转,其在空间上取决于集装箱重量和小车位置。
第2步:第一步的空间模型可扩展为二维(2D)模型。在这里,双变量多项式参数化二维中的偏差。附加尺寸等于小车在横梁上的位置。对于每个单独的加载操作,第二步可与第一步类似。
步骤3:在第三步中,为了将所有测得的加载操作结合到一个通用模型中,所有测量值都集成到二元多项式的参数化中。除了通常的多项式参数外,每个加载操作的比例因子都会考虑不同的加载操作。
步骤4:此步骤将加载操作依赖性替换为负载依赖性,因为不是特定加载操作对变形敏感,而是对感兴趣的负载重量敏感。
最后,根据每一个参数(取决于无轨电车位置和荷载)预测出的重心轨道的影响。随后将详细解释步骤1-4。
第一步:一维建模
对于每个加载操作t,在每个步骤中进行n 56观察。这些是沿着x轴(见图2)定位的倾斜传感器(lt、1、lt、2、lt、3、lt、4和lt、5)和第一个测速仪(lh)测量的高度。如前一节所述,这些观测值是预处理的。事实上,它们等于差异以形成最终参考。最后,在进行验证时,使用这些预处理的测量值。
除了这些观察结果之外,还有一个进一步的测量是确定输入,即沿x轴(y)测量的轨道位置,由第二个测速仪测量。这不包括在观测范围内,因为它不集成在一维模型的调整中;对每个小车位置(y)和每个装载操作(t)估计一个单独的多项式。因此,每个弯曲曲线(z_x_)的建模取决于装载操作(t)和沿着x轴(z y,t_x)的小车位置(y)。②
对于反弯曲线的参数化,将选择本小节后面将解释的多项式ax阶。
这里,是要估计的参数。因为多项式在x50m处的偏移量,位于左侧支撑梁上方,假定为零。参数p0可以实现。这会将参数的数量减少到ax。为了估算这些参数,使用以下观测值:
在这里,伪观测Lo将右支撑梁上方的多项式的末端强制为零。由于观测次数有限,两个支撑梁上方两个位置的多项式的这种定义导致了更可靠的估计。由于观测是随机的,与其他实际观测一样,多项式在其标准偏差范围内仅在x574m处固定为零,因此。如果把伪观测作为一个条件方程来引入,这将是不同的。
测斜仪测量的标准差为ST 50:1m m=m,测速仪测量高度的标准差为SH 52:5m m,伪观测的标准差为S0 50:1m m。测斜仪ST的标准偏差过大。这不是基于对测斜仪传感器本身的两个决定,而是综合了光束振荡引起的失调误差和不确定性。毕竟,这些标准偏差是基于制造商的规格和几何考虑(用测速仪测量的距离和测斜仪的偏差)的经验评估。
在线性高斯-马尔可夫模型中将观测值和协方差矩阵集成为最小二乘法(Koch,1988)
参数估计如下:
图5揭示了这样一个事实:如果小车位于桥的中间37 m处,则最好进行适当的调整。当小车从中间移开时,过滤器的质量似乎会降低。但是,由于测定系数对偏差的大小也很敏感,因此在判断过滤器的质量时,还应考虑进一步的参数。这些参数可以是估算的残差,^v,以及调节器的表面驱动力,^s2。两种方法都支持先前的结果(图中未显示),即过滤器的质量下降。将小车移动到梁端时。这些条件包括以下几个方面:首先,如果小车移动到起重机的末端,则作为参数化的参数化的多项式模型。第二,小车移动到梁端时,信噪比变差,这是因为挠度的小幅度增加了,因此,为了保证可靠的结果,所有进一步的测量都限制在20-50米之间的小车位置。
图6显示了根据三个不同的小车位置,一个特定装载操作产生的偏转曲线。如图所示,最大偏转位置取决于小车的位置。此外,由于门式起重机的结构是简单对称的,因此弯曲曲线在梁的中间也是不对称的。
资料编号:[3168]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

