
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
利用单个永磁体产生旋转磁场,推进无腔内磁阻器件的推进
IEEE学生会员Arthur W. Mahoney和IEEE会员Jake J. Abbott
手稿于2013年6月6日收到;2013年10月22日接受。发布日期2013年11 月21日;当前版本的日期为2014年4月1日。本文由副主编N. Simaan和编辑BJ Nelson在评估评审员意见时推荐出版。这项工作得到了美国国家科学基金会在Grant 0952718和Grant 0654414的支持下的支持。
AW Mahoney是美国犹他州盐湖城犹他州大学计算学院(电子邮件: art.mahoney@utah.edu)。
JJ Abbott是美国犹他州盐湖城犹他州大学机械工程系,电子邮箱: jake.abbott@utah.edu。
本文提供了补充多媒体(电影)可下载资料http://ieeexplore.ieee.org.文件大小为5.1 Mb。
本文中一个或多个图的彩色版本可在线获取http://ieeexplore.ieee.org. 数字对象标识符10.1109 / TRO.2013.2289019
摘要到目前为止,单旋转永磁体驱动的无约束磁器件,如主动胶囊内窥镜和磁微机器人,已经被限制在旋转偶极子场行为简单、易于观察的位置上工作。在本文中,我们展示了如何使用一个单旋转磁铁执行器在空间中的任何位置产生一个具有任意旋转轴的旋转磁场,用于驱动磁性器件。所提出的方法可以控制无约束旋转磁器件,而旋转执行器磁体的运动轨迹与无约束器件本身无关。我们通过驱动内腔中的旋转磁场来演示我们的方法。应用包括微创医疗任务,需要一个不受约束的磁性装置在身体的自然腔道(如胃肠系统、神经系统的蛛网膜下腔或血管系统)中操作。
索引项-胶囊内窥镜,磁性处理,化学机器人,微量元素。
一、导言
由于其对微创药物的潜在影响,诸如mag-unetic微型机器人[1]和磁驱动胶囊内窥镜[2]等集成磁器件(UMDS)已成为研究的一个活跃领域。这些装置的能量来自外部磁场。有些驱动形式利用磁力进行拖动[3]–[7],另一些则利用磁力力矩在表面上滚动[8]–[10],通过螺旋螺旋螺旋推进器[11]–[15]在液体或腔中游泳,通过软组织[16]、[17]拧入,或使用柔性尾巴游泳[18]。由于这些装置的尺寸范围从微尺度到中尺度,并采用多种形式的磁推进,因此我们在本文中将其称为无任何隐含尺寸、推进方法或应用的UMDS。这些装置可以看作是大型机器人系统的简单末端执行器。
由于永磁体能够以低成本产生强磁场,研究人员正在考虑将永磁体系统用于UMD驱动[8]–[12]。由于产生磁场的复杂性,使用永磁体驱动UMDS往往是不平凡的。在使用单一永磁体驱动的情况下,迄今为止开发的UMD控制策略采用了吸引磁力或简单的磁力驱动方式。策略只使用吸引力的磁力,产生在一个单一的永久磁铁和一个城市轨道交通,电磁部署的磁力拖动[3],[4],[6],[7]。专门采用磁矩的策略通常应用由单个旋转永磁体产生的旋转磁场,使UMD旋转;然后使用螺旋线或螺钉[11]、[12]或滚动[8]–[10]将UMD旋转转化为推进力。
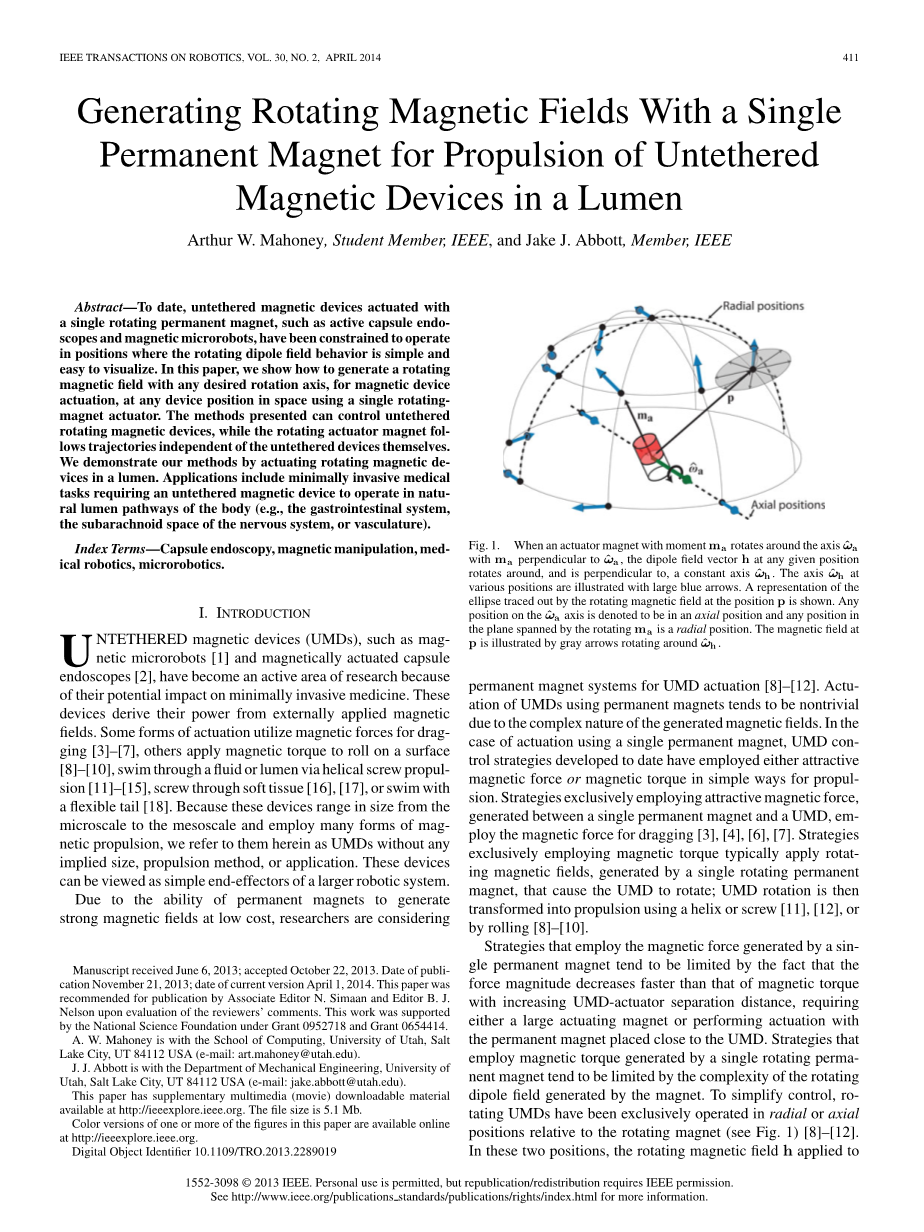
使用单一永磁体产生的磁力的策略往往受到以下事实的限制:随着UMD执行器分离距离的增加,力的大小比磁力扭矩的减小更快,需要一个大的执行磁铁或使用靠近UMD的永磁体执行驱动使用单一旋转永久磁铁产生的磁力矩的策略往往受到磁铁产生的旋转偶极场复杂性的限制。为了简化控制,旋转UMDS仅在相对于旋转磁铁的径向或轴向位置运行(见图1)[8]–[12]。在这两个位置,施加在UMD上的旋转磁场H围绕平行于交流执行器磁铁旋转轴omega;a的轴omega;h旋转,使旋转执行器磁铁与UMD之间的耦合更容易可视化。然而,要求UMDS仅在这两个位置运行,会极大地限制执行器磁铁的物理位置。
图1.当具有力矩的致动器磁体围绕轴旋转且垂直于时,任何给定位置处的偶极场矢量h围绕旋转,并垂直于,恒定轴。各个位置的轴用大的蓝色箭头表示。示出了由位置处的旋转磁场描绘的椭圆的表示。轴上的任何位置表示为轴向位置,并且由旋转跨越的平面中的任何位置是径向位置。处的磁场由围绕旋转的灰色箭头示出。
研究表明,当偶极子(如旋转永磁体)旋转时,其磁矩垂直于其旋转轴,在空间中任何位置产生的磁场围绕恒定轴旋转并垂直于恒定轴,其磁场大小用椭圆描述(见图1)[19]。在本文中,我们重新表述了这种现象,使执行器磁铁的独特旋转轴容易被发现,在任何UMD位置产生任何所需的磁场旋转轴(可能特别需要产生旋转UMD推进)。这就不再需要在轴向和径向位置单独驱动旋转的UMD,从而使执行器磁铁的位置在UMD运行期间能够自由移动,以避免工作空间中的障碍物,并证明控制权限,并可能使用有吸引力的磁力同时促进推进。
我们通过测量旋转磁场、驱动螺纹胶囊UMD和通过管腔滚动球形UMD来证明我们的结果,使用一个6自由度(DOF)机器人MA咬合器在空间中定位的旋转永久磁铁(我们称之为“执行器磁铁”)。应用包括任何微创医疗任务,要求UMD在身体的自然腔道(如胃肠道、神经系统蛛网膜下腔或血管系统)中操作。应用我们的方法驱动UMDS的机器人系统在执行器磁铁位置的选择上将更加灵活。
本文包含了最早出现在[20]中的结果,以及对磁场性质的额外形式分析、外部结果和讨论。实验结果是概念验证实验,证实了本文所包含的理论。在人体胃肠道中,寻找UMD驱动的最佳执行器磁铁位置、定位系统的最佳选择以及推进所需的磁场等问题已超出本文的研究范围。
二、用单旋转永磁体控制旋转无磁装置
本文中,比例尺用小写标准字体(如)表示,向量用小写粗体字体(如)表示,矩阵用大写标准字体(如)表示。符号表示单位长度矢量(例如)。
假设UMD磁体的偶极矩为。如果在UMD上施加磁场,则会产生磁矩和磁力:
其中是自由空间的渗透性[21]。请注意,在文献中,磁场通常表示为,但是,为了保持本文的惯例,我们在小写中表示为。
磁力矩使沿方向旋转,如果磁场h绕轴旋转(旋转方向由“右手”规则给出),则将使从而使UMD连续旋转。磁力F使UMD沿由UMD偶极矩和磁场空间导数决定的方向平移。利用磁力矩产生UMD推进,产生UMD旋转,通过滚动或丝扣将其转化为推进力,磁力可用于牵引,或两者同时使用。
如果磁场H是由单个执行器磁铁产生的,那么它在UMD位置(见图1)处相对于执行器磁铁中心的磁场可以用点偶极子模型来近似。
式中,为执行器磁铁的偶极矩,为单位ma trix[21]。方程(3)精确预测了球形磁铁产生的磁场。对于所有其他几何图形,它是一种随着距离的增加而变得更精确的近似。非球面几何可以通过(3)在较小的距离上很好地近似[22]。
A、磁场的旋转轴
对于采用由旋转磁场h产生的磁扭矩进行推进的UMD,适当地选择磁场的旋转轴 是控制策略的关键部分。对于自由介质中的UMD(例如,流体中的螺旋微型模拟器)或滚动的UMD,UMD旋转轴自然地与对齐并且变化的控制UMD。对于约束在管腔中的螺旋状UMD(例如,小肠中的磁性胶囊内窥镜),应当与腔局部对齐,以便施加最有用的磁扭矩。
1)选择给定的和:对于由绕轴旋转的执行器磁铁产生的偶极子场,使磁场H在任意所需位置绕所需轴旋转所需的旋转轴不容易可视化。如果执行机构磁铁的旋转使其偶极矩垂直于即),并且希望场垂直于即),则可通过将(3)代入投影并应用的对称性来找到给定所需的必要,以产生表达
因为不随执行器磁铁旋转而变化,并且由于,使得与H平行是满足(4)且同时对旋转不变的唯一解。因此,在给定和UMD位置p的情况下,可以用
因为是用构造的,只随方向的变化而变化。这意味着,从(5)中获得的解是不变的,通过将执行器磁铁移近或远离UMD,只要P的方向保持不变。当然,磁场的大小取决于。此外,附录A中显示,、和总是共面的。
用(3)可以很容易地证明H的特征向量包括和平面上与正交的向量组成的二维特征空间,其特征值分别为和。由于所有的,始终是可逆的,并且恰好存在一个执行器磁铁旋转轴,以产生任何UMD位置围绕轴的所需场旋转。给定执行器磁铁旋转轴,给出位置处的局部旋转轴的正向问题离子,与
其中(源自附录B)。图1显示了给定的半半球位置处的。
从定位系统中获得,已知所需的外加磁场旋转轴,可通过(5)快速找到所需的执行机构旋转轴。当UMD或执行器磁铁移动且的方向改变时,(5)必须通过重新填充矩阵来更新,并且必须产生新的解,以将所需的外加磁场旋转轴保持在。理论上,可以首先建立所需的执行器磁铁位置轨迹,并在Durin中找到所需的。G执行给出了执行器磁铁和UMD的位置。然而,在实际应用中,执行器磁铁的位置轨迹应与UMD的行为相适应,以保持控制权,同时避免硬件碰撞或其他约束。如果使用机器人操纵器定位执行器磁铁,由于操纵器关节的范围限制,可能无法在每个操纵器姿势上物理实现的每个潜在方向。在运动规划过程中,可以利用这样一个事实来缓解这个问题:通过反转执行器磁铁的旋转方向,至少可以从两个独特的操纵器姿态中获得所需的。
2)选择给定和:如果执行器磁铁的旋转轴的方向是固定的(例如,如果执行器磁铁仅使用3-DOF龙门 机器人定位),则任何所需通过牺牲致动器 - 磁体定位灵活性并将致动器磁体放置在特定位置,仍可在任何UMD位置 实现施加的场旋转轴。如果通过改变致动器磁体的旋转方向可以反转的方向,则存在至少四个位置的唯一方向,其中可以放置致动器磁体以实现任何期望的。
给定所需的场旋转轴并且致动器磁体旋转轴固定且已知,用于必要的致动器磁体位置的解决方案(实际上计算为UMD相对于致动器的位置方向)通过首先计算中间投影获得的投影找到磁体
用替换(5)后。(的值已知,因为和已给出。)平方(7)和分组项的两边,得到未知的多项式
对于,存在两种(8)的解,其可以使用二次公式找到
并分别由以下和以上的1/3进行验证。在检查(7)的右侧后,很明显,要求,而要求。分别给出(9)和(10)的上下限,则(7)的解为
对于(11)给出的值,可以在两个相反的方向上找到的两个解(由于):的溶液表示为,的溶液表示为。利用、和总是共面的事实(见附录A),可以通过首先为和所跨越的平面生成一个正交基来构造。选
择第一基向量为后,第二基向量为
由于是对的投影,因此矢量可以从标准正交基形成
式中,从(11)中获得,并且的溶液由()给出。在确定了之后,可以在不改变(13)结果的情况下选择。当(12)退化时有两种情况,并且上述构建的方法失效,这两种情况都如图2(a)所示。第一种情况发生在时。在这种情况下,可以使用(11)验证,这意味着与和平行。这些位置对应于轴向位置(见图1)。第二种退化情况发生在时。在这种情况下,意味着必须垂直于和。在这种情况下,有无限多的解,所有解都对应于径向位置(见图1)。反转执行器磁铁的旋转方向,将一个退化情况转化为另一个。
在其他非退化情况下,将执行器mag net向一个方向旋转约可获得的两个唯一解,而向相反方向旋转可改变的符号,从(11)中产生另一个值,并可获得两个额外的唯一解,总共可获得四个唯一解,以产生所需的磁场旋转轴给出了可逆执行器磁铁旋转轴。图2(b)显示了一组执行器磁铁位置的示例,当执行器磁铁的旋转轴受到限制但允许反向时,该位置可实现所需的磁场旋转轴。
图2.(a)导致(12)退化的结构,。(b)当执行器磁铁的旋转轴被约束为和时,实现所需磁场旋转轴的执行器磁铁位置解的示例集。位置和分别是由(13)给出的和溶液。如果执行器磁铁的旋转方向可以逆转,使得,那么和是相应的和溶液。
B、磁场的大小和旋转速度
对于旋转UMD,当UMD随着磁场旋转而与旋转磁场失步时,会出现一种导致控制权丧失的常见故障模式。施加的磁转矩过小而无法使UMD与旋转磁场同步的旋转频率称为“失步”频率,用表示。如果一个UMD的旋转动力学主要由摩擦和惯性控制,那么它的角速度大约与一个Lin-Ear阻尼系数c的磁转矩成正比,并且也是需要总可用磁转矩来保持同步的速度(对于非负的UMD,类似的特性也适用合格惯性)。任何瞬间的最大可用扭矩为,导致失步频率.
在执行器磁铁产生的旋转非均匀场中,在任何给定的UMD位置处的应用场大小和角速度取决于和的方向。在执行器磁铁旋转期间,瞬时场大小以椭圆形方式波动,并且
并且最小和最大场强是
式中,向量是在垂直于(
全文共16608字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[452680],资料为PDF文档或Word文档,PDF文档可免费转换为Word

