英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
摆动从动件圆柱凸轮膨胀节曲线曲率半径分析
目前计算圆柱凸轮平面扩展节距曲线曲率半径的方法会产生误差。因此,迫切需要找到一种精确的圆柱凸轮设计方法。本研究利用从动件运动轨迹的三维展开曲线坐标,建立了考虑偏差角的平面展开节距曲线方程,可用于摆动从动件圆柱凸轮的分析和设计。根据机构运动规律和凸轮主圆柱半径,推导出了凸轮曲率半径的计算公式。利用MATLAB语言描述了在一定运动规律下,考虑平面扩张节距曲线随凸轮主圆柱半径变化,最小曲率半径与凸轮主圆柱半径之间的关系曲线,并根据关系曲线,为每个允许的曲率半径生成特定的主圆柱的最小半径。因此,可以设计圆柱凸轮的几何参数,并通过一个具体的实例验证了该方法的可行性。
关键词:圆柱凸轮,三维展开,曲率半径,主圆柱半径。
在欧美各国,很多学者为凸轮机构的研究做出了贡献。早在三十年代,F.D.Furman就写了一本系统介绍凸轮设计的著作,当时的研究主要集中在低速凸轮机构,而且主要分析的是运动规律。到了四十年代,人们开始对配气凸轮机构的振动进行深入研究,并从经验设计过渡到有理论根据的运动学和动力学分析。四十年代末,J.A.Hrones等人已经注意到从动件的刚度对凸轮机构动力学有明显影响。五十年代初,D.B.Mitchell最先对凸轮机构的进行实验研究。后来不少学者采用多种仪器,如高速摄像机、加速度分析仪和动态应变仪等,对高速凸轮的动力学响应进行测量,并获得了许多重要成果。近几年,为了适应高速分度凸轮机构设计与制造的需要, 还开展了圆柱分度凸轮机构等的动力学理论和试验研究, 建立了动力学模型, 进行了动力特性分析, 这些研究有利于提高凸轮机构的运行速度和改善凸轮机构的动态性能。计算机辅助设计系统及专家系统也有了相当的研究。凸轮机构在机械中应用十分广泛,如:在自动机床进刀机构、上料机构、内燃机配气机构、制动机构等。由于电子技术的发展,现在某些设备的控制单元可以采用电子元器件,但它们一般只能传递较小的功率,而凸轮机构却能在实现控制功能的同时传递较大的功率,因此,凸轮机构在生产中具有无可替代的优越性,尤其在高速度、高精度传动与分度机构及引导机构中,更有突出的优点。圆柱凸轮结构紧凑,又有良好的动力学性能,因此在凸轮机构中占有重要地位。
圆柱凸轮机构是机械领域中常见的机构。与其他机构相比,圆柱凸轮机构具有体积小、结构紧凑、刚性好、驱动力矩大等优点。圆柱凸轮的节曲线是一条复杂的空间曲线,很难根据从动件的运动规律来设计其节曲线。一般来说,为了简化设计和制造过程,圆柱凸轮的设计是对凸轮表面进行展开,计算平面展开螺距曲线坐标,并根据许用压力角和曲率半径等工程条件确定凸轮的几何参数。在设计摆动从动件圆柱凸轮机构时,考虑到凸轮的旋转角度与摆动角度之间的运动规律,计算平面扩展节距曲线的最小曲率半径rho;min(包括凸起部分和凹入部分)是非常重要的。如果rho;min太小,则难以选择切割器和滚子。 这是因为以下原因,首先,滚子的半径Rr应小于凸起部分的rho;min,以避免凸轮轮廓中存在尖点。第二,加工凸轮廓线的刀具半径Rt应小于凹入部rho;min,以避免刀具与凸轮廓线的干涉,减少切削力和剧烈振动。然而,如果Rho;MIN太大,会导致凸轮机构尺寸过大,这意味着惯性力较大,可能导致凸轮与从动件之间的接触力和应力较高。因此,迫切需要找到一种合适的方法来计算圆柱凸轮平面膨胀节曲线的曲率半径。此外,最小曲率半径rho;min与圆柱凸轮的主圆柱半径R有关,因此,确定rho;min与R的关系曲线也很重要。
世界各国学者对圆柱凸轮进行了大量的研究,提出了许多计算平面膨胀节曲线坐标及其曲率半径的方法。例如,liu等推导出了具有普遍意义、可操作性强、对其它凸轮分析有较好参考价值的刀面旋转和工件螺旋面的接触线方程。Hidalgo-Martı#39;nez讨论了Be#39;zier曲线在凸轮设计中的应用,并提出了一种使用Be#39;zier纵坐标作为优化参数来优化凸轮轮廓设计的数值方法。这种凸轮-随动机构推荐用于空间受限和涉及非常大力的应用场合。Hung和Lai提出了一种使用小型工具切割滚子槽的圆柱凸轮设计和制造系统。根据凸轮节曲线上滚子的纯滚动条件,Hsieh和lin通过矩阵变换,推导了空间凸轮的廓线方程。Hsieh和Grant和Soni描述了制造圆柱凸轮过程的理论方案。Thinh和Joong提出了一种利用平滑样条曲线设计柔性凸轮廓线的方法。然而,考虑到实际工程应用,仍有必要寻找一种简单、精度高、几何性质明显的方法。Shi和WU以及Norton讨论了绘制平面膨胀节曲线、获取其坐标方程以及推导曲率半径的技术。然而,这些方法在处理轨迹点与凸轮旋转轴之间的偏移时会产生误差,因为它们错误地假定了轨迹点在膨胀面上的运动轨迹是一条圆弧。三维展开法是由Yong、 Chen、Wu等提出的一种无误差展开圆柱凸轮节曲线的方法。然而,他们还没有对曲率半径进行进一步的研究。
本文的研究目的是通过分析从动件运动轨迹的三维展开曲线坐标,建立考虑偏转角的平面展开节曲线方程,从而提出摆动从动件圆柱凸轮的精确设计方法。
常用方法存在的误差
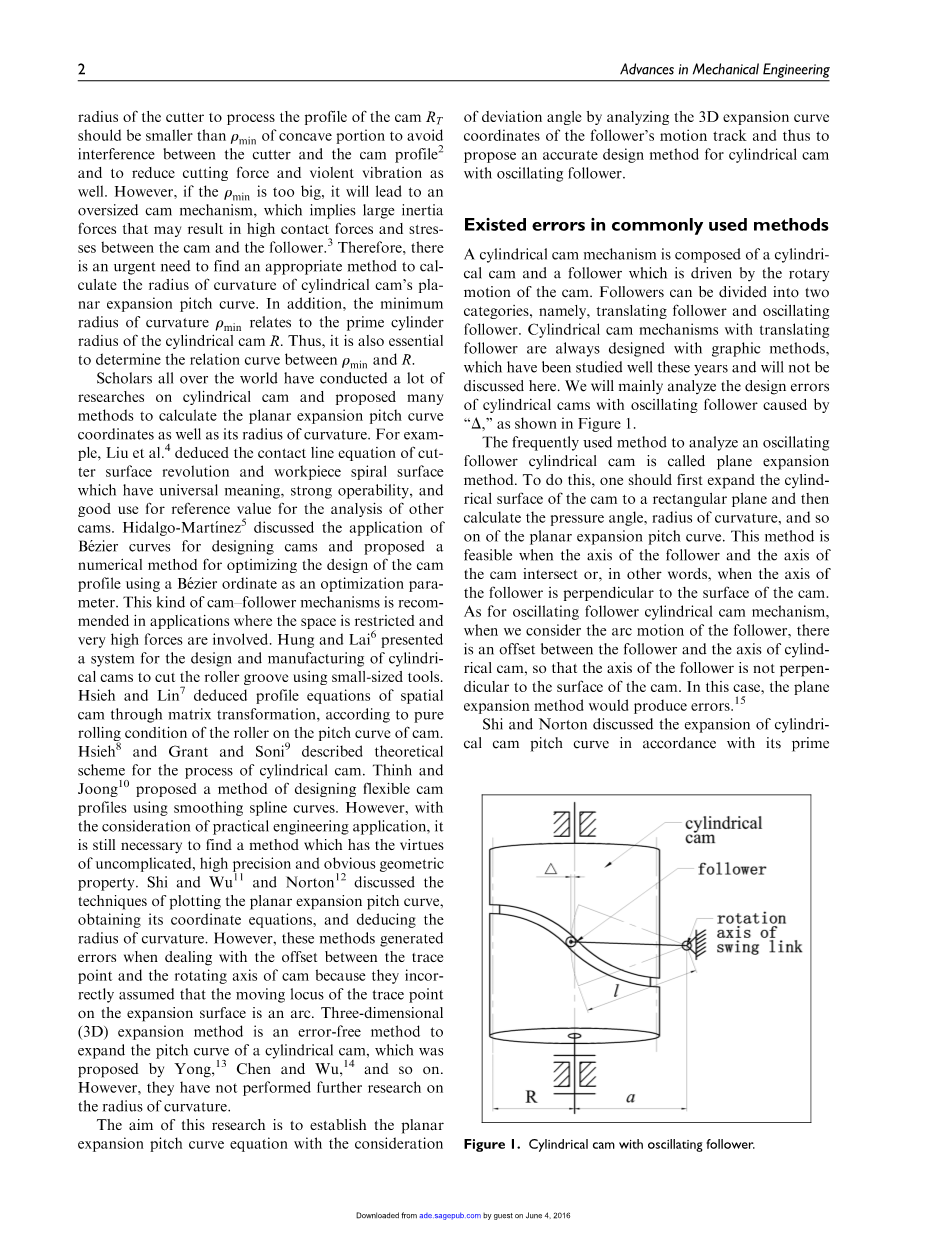
圆柱凸轮机构由圆柱凸轮和从动件组成,从动件由凸轮的旋转运动带动。随动件可分为平移随动件和摆动随动件两类。直动从动件圆柱凸轮机构一直以来都是用图解法设计的,近年来研究得很好,本文不作讨论。我们将主要分析“△”引起的摆动从动件圆柱凸轮的设计误差,如图1所示。
分析摆动从动件圆柱凸轮的常用方法称为平面展开法。为此,首先应将凸轮的圆柱面展开成一个矩形平面,然后计算平面展开节距曲线的压力角、曲率半径等。当从动件轴与凸轮轴相交时,或者换句话说,当从动件轴与凸轮表面垂直时,这种方法是可行的。对于摆动从动件圆柱凸轮机构,在考虑从动件的圆弧运动时,从动件与圆柱凸轮轴之间存在一个偏移量,使从动件的轴线不垂直于凸轮表面。在这种情况下,平面展开法会产生误差。
Shi和Norton讨论了圆柱凸轮节距曲线按照其主圆柱展开的问题,详情如图2所示。b0是轨迹点的起点,它是从动件上的一个点,对应于虚拟刀刃跟随器的接触点和滚子中心,在这种情况下,凸轮的旋转角度和摆动连杆的摆动角度都为零。△是跟踪点与圆柱凸轮轴之间的距离。B1和B2是圆柱形凸轮的旋转角度为phi;1和phi;2时的轨迹点的两个位置,并且摆动连杆的摆动角度为psi;1和psi;2。d0是在位置b2处,跟踪点与圆柱凸轮轴之间的距离。展开面上的圆弧半径等于摆动连杆L的长度(如图2所示)。
轨迹点的运动轨迹为圆弧,投影在主圆柱表面,如图3所示。因此,我们可以看到,按照图2所示的主圆柱展开的轨迹,绝对不是一个弧。如图1所示,轨迹点与圆柱凸轮轴之间的距离为△rsquo;。而且,根据主圆柱的膨胀表面上的距离(对应于弧B2A2的膨胀长度)明显长于△rsquo;,并且误差与轨迹点和圆柱凸轮的轴之间的距离成比例。 因此,在Shi和Wu以及Norton的报告中引入的扩展方法会产生误差,因此,它不适合计算平面扩展节距曲线的曲率半径。
图1.摆动从动件圆柱凸轮
图2.膨胀节距曲线与主圆柱一致
图3.对应弧的图表
设计摆动从动件圆柱凸轮的平面扩展节距曲线并确定其曲率半径
在这里,我们将评估圆柱凸轮机构的工作过程和工作条件。 根据凸轮的旋转角度phi;与摆杆的摆角psi;之间的关系的运动规律,可以得到下一个运动轨迹的三维扩展曲线。 可以基于平面扩展曲线方程计算每个点的曲率半径。 因此,可以通过MATLAB绘制最小曲率半径和主圆柱半径之间的关系曲线。
随动件运动轨迹的三维展开曲线
从动件通过槽移动,由圆柱凸轮的旋转运动驱动。从动件在旋转平面上的圆周运动可分为两个正交直线运动。因此,圆柱凸轮机构的整体运动由凸轮的旋转和从动件的两个直线运动组成,这是一个空间运动。摆动从动件圆柱凸轮的空间运动可以转化为平面运动。表面是一个半径等于回转连杆长度的圆柱体,称为三维展开面,如图4所示。根据运动规律,摆杆摆角与圆柱凸轮旋转角的关系可定义为方程(1)。
Psi;=f(phi;)(1)
由方程(1)可知,当三维展开面上的点被纵倾曲线上的随机点(即轨迹点的路径)拾取后,可以在三维展开面上找到相应的点,形成展开纵倾曲线。笛卡尔坐标系下膨胀节曲线的系统方程如方程(2)所示。
图4.圆柱凸轮的三维展开面
平面膨胀节曲线方程
在摆动从动件圆柱凸轮机构的运动中,由于轨迹点与圆柱凸轮轴之间的偏移,中心线(Y轴)与轨迹点与主圆柱中心连接的线在主圆柱表面形成一个角度,称为偏差角delta;。delta;由方程(3)所表示。
当沿圆柱凸轮旋转方向偏离中心线时,delta;为正。当沿圆柱凸轮的旋转反方向偏离中心线时,delta;为负。当圆柱凸轮的旋转角度为phi;时,上述交点在phi;后面旋转一个角度delta;。如果我们将圆周角定义为圆柱凸轮的交点与起点之间的角度,则此时的圆周角为phi;-delta;。在适当考虑偏差角度delta;的情况下,根据凸轮的圆周角,在yz平面上展开螺距曲线,得到方程(4)。因此,将膨胀节曲线转化为平面曲线。
根据圆周长度的比例变换,将方程(4)转化为方程(5),使单位相同。
我们假设参数方程
如果是可微的,那么有以下方程
因此,我们可以推导出曲率半径的表达式如下
关于平面膨胀节曲线的表达式,根据方程式(5)
众所周知,凸轮节曲线的凸形部分有一个正rho;,凹形部分有一个负rho;。为了确定最小rho;,曲率半径的表达式可以作为其绝对值。
最小曲率半径与主圆柱半径的关系曲线
方程(9)中,f是phi;的函数,frsquo;是f对phi;的导数,frsquo;rsquo;是f的二阶导数,l和a是常数。当已知R时,可计算出最小曲率半径rho;min。此外,当R值变化时,可以计算出相应的rho;min,从而绘制出R值与最小曲率半径值之间的关系曲线。
这个新开发的方法的设计示例
让我们考虑一个例子来比较上面提出的新方法和以前的方法。在这个例子中,我们将用两种不同的方法在相同的条件下计算平面膨胀节曲线的坐标方程,并对最小主圆柱半径进行对比分析。我们假设跟随者运动定律f(phi;)的方程为方程(10),如图5所示。
图5.运动曲线
Psi;=f1(phi;)为升力段曲线方程,Psi;=f3(phi;)为回程段曲线方程。考虑到它们是对称的,我们只考虑Psi;=f1(phi;)。
因此,根据这一运动规律,最小曲率半径与主圆柱半径之间的关系曲线可以用MATLAB来描述。当允许曲率半径为20 mm时,还可以求出最小主圆柱半径的值。已知条件为l=253 mm和a=251 mm。
最小曲率半径与主圆柱半径的关系曲线如图6所示,当允许曲率半径为20 mm时,最小主圆柱半径为59.4 mm。
根据式(5)和式(10),得到平面展开节距曲线的系统方程,其中R=59.4 mm为主圆柱半径,l=253 mm为摆杆长度,a=251 mm为摆杆旋转轴与圆柱凸轮轴之间的位移。
图6.最小曲率半径与R(三维展开)的关系曲线
表1:允许曲率半径与最小R(三维展开)的关系表。
|
允许曲率半径(mm) |
10 |
15 |
20 |
25 |
30 |
|
主圆柱最小半径(mm) |
42.0 |
51.5 |
59.4 |
66.5 |
72.8 |
表2:允许曲率半径与最小R(平面展开)的关系表。
|
允许曲率半径(mm) |
10 |
15 |
20 |
25 |
30 |
|
主圆柱最小半径(mm) |
42.6 |
52.1 |
60.2 |
67.2 |
73.6 |
图7.平面膨胀节曲线
平面膨胀节曲线如图7所示。
通过在程序中将允许的曲率半径修改为一些特定值,相应的主圆柱最小半径如表1所示。
如果根据Shi和W1和Norton 进行扩展,得到的平面扩展节距曲线坐标系统方程式是根据式(12),通过导出曲率半径的表达式和写入MATLAB程序,得到了关系曲线。 最小曲率半径和主圆柱半径可绘制成图8,当允许曲率半径为20 mm时,最小主圆柱半径为60.2 mm。
通过在程序中将允许的曲率半径修改为一些特定值,相应的主圆柱最小半径如表2所示。
基于这两种方法的最小曲率半径与主圆柱半径的关系曲线对比如图9所示。
从表1
全文共6416字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[451105],资料为PDF文档或Word文档,PDF文档可免费转换为Word

