英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
起重机的倾斜载荷控制
Michael J.Toth,Colby F.Lewallen,
摘要
起重机操作员很难在不引起明显不受控制的晃动的情况下提升和操纵载荷。因此,在起重机操作领域的研究集中在设计控制器以减少负载的摆动。然而,从一个非平整的表面(如许多室外建筑工地),将长而细的负载(如钢梁)吊起没有得到详尽的处理。这篇论文评估了两种不同控制方法在从一个倾斜的表面提升一个细长负载时的剩余摆动幅度和稳定性。最终采用半自动化的方法,起重机操作员控制起升方向,同时比例积分微分(PID)控制器调整吊车位置。实验结果表明在大多数倾斜角度情况下,该方法将残余振动的峰值振幅降低了约80%。
1介绍
在工地上最大限度地减少吊车载荷的摆动对工人的安全是很重要的,因为工作场所伤害和死亡的主要原因之一是在搬运过程中使用起重机[1]。除了对工人造成伤害外,如果负载不受控制地摆动,则更有可能被损坏。有意义的研究是用从前馈技术到非线性反馈控制的各种方法来抑制负载的摆动[2-4]。在一定范围内,对在举升过程中尽量减少剩余摆动也进行了研究[5,6]。然而,起重机操作领域需要更多的研究,例如如何从一个非平整的表面(例如,建筑工地的地面)吊起细长的负载(例如,钢梁)。
在使用起重机提升长而细的载荷时,操作者必须同时管理吊钩的高度和顶部的小车位置,这样负载就会以最小的摆动离开地面[7]。对于起重机操作员来说,这是一项难以掌握的技能[8]。已经开发了不同的控制器方法来自动化提升过程,但是没有人考虑到从倾斜的表面提升负载的挑战[2-5,7,9,10]。从倾斜角度出发会带来额外的挑战,因为在起重机操作员准备好将负载完全从地面升起之前,负载可以滑动。这可能会激发巨大的振幅剩余摆动,甚至会损坏负载。因此,这项工作的目标是设计一个控制器来从倾斜的平面上抬起一个角度,同时尽量减小摆动幅度。
2命名
|
负载的势能(J) |
作用于负载的法向力(N) |
|
摩擦力(N) |
电缆张力(N) |
|
重力加速度() |
吊钩坐标(m) |
|
小车缆绳长度(m) |
负载坐标(m) |
|
负载总长(m) |
小车坐标(m) |
|
吊钩质量(Kg) |
吊钩挠度(deg) |
|
小车质量(Kg) |
负载角度(deg) |
|
负载质量(Kg) |
静摩擦系数 |
|
地面角度(deg) |
负载内部角度(deg) |
3方法
我们所希望的载荷运动,是当它从倾斜的表面上升时,绕着边缘轴旋转,直到质心是在边缘轴正上方。在轴点上的摩擦力、张力和重力的适当平衡,可以使负载不致滑倒。因此,在提升过程中必须相当小心,以保持这种平衡。
当载荷在倾斜面上时,作用于载荷的重力和摩擦力相互抵消。对于起重机操作员来说,将负载从具有未知摩擦系数的倾斜表面上提升,这是一项特殊的挑战。此外,天气条件(如雨、雪、冰等)也可以改变摩擦系数。目前,工人们雇用了一些人来定位和控制负载,这是具有潜在危险的。由于滑移条件具有潜在的危险,因此控制器必须尽量减少发生这种情况的机会。
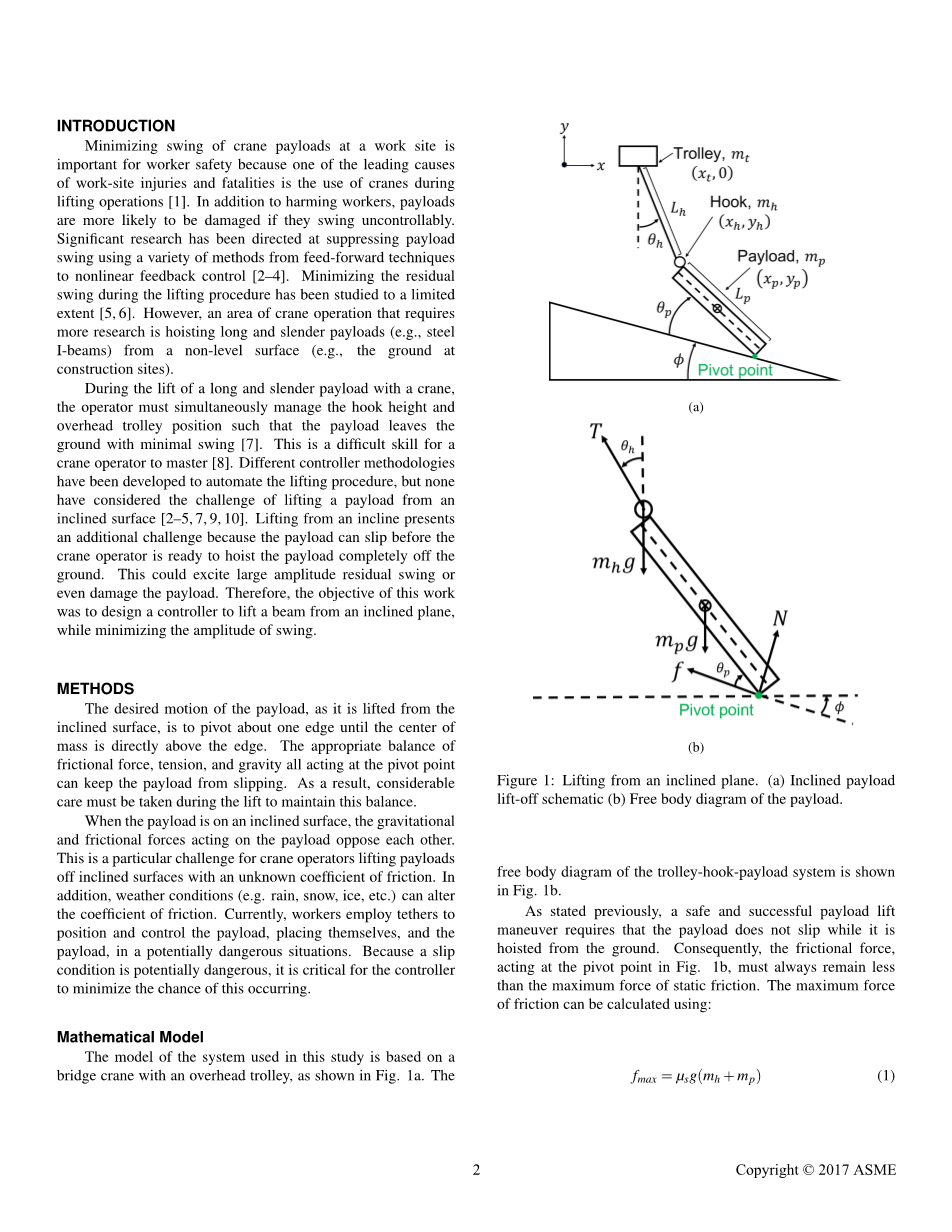
(a)倾斜载荷起升原理图 (b)负载的受力图
图1负载从斜面升起
4数学模型
本研究采用的系统模型是基于带有小车的桥式起重机,如图1a所示。图1b显示了有轨电车负载系统的自由受力图。
如前所述,安全有效的负载提升方案要求负载在从地面升起时不会滑动。因此,在图1b中的轴点作用的摩擦力,必须始终小于静摩擦的最大力。最大摩擦力计算可用下列公式:
(1)
法向力和电缆张力增加了额外的约束。首先,法向力必须大于零,因为在真正的起重机系统中,负载和地面不能连在一起;因此,一个负的法向力是不可能的。第二,电缆张力必须保持大于零,以防止电缆松弛。如果电缆即使是暂时的松弛下来,负载将会滑落的可能性很高。如果负载足够重,并且起重机在其极限下运行,那么一段时间的电缆松弛甚至可能使负载暂时拉扯起重机上,并有足够的力量损坏起重机。
由于负载的理想运动,当它从地面升起时,在一个转角上旋转,直到它完全垂直,所以应该调整小车位置,使其始终近似于在负载的边缘的上方。任何没有满足方向条件,或者电缆是缩回,会导致负载在倾斜的表面的上下滑动。因此,系统是运动受限的。在这一点上推导系统的非线性运动方程需要对这些约束方程进行二阶导数。为了简化数学运算,该电缆被视为具有可变长度的无质量梁。用于推导非线性EOMs的运动约束方程为:
(2)
(3)
利用这些方程的二阶导数并重新排列来求解和,得到以下非线性EOMs:
(4)
(5) (6)
在Simulink模型中实现了这些非线性EOMs系统,以评估有轨电车负载系统在各种控制方法下的响应。最后,采用PID和轨迹跟踪控制方法实现了桥式起重机的实际应用。
5实验装置
乔治亚理工学院先进的起重机控制实验室的实验装置如图2所示。实验参数如表1所示。
图2起重机控制装置的实验装置
载荷(铝制)与地面(木材)之间的静摩擦系数试验确定为0.21。这个低摩擦系数限制了最大测试角度为12度,因为如果角度更大,负载在测试开始之前就会开始滑动。通过使用混凝土或橡胶等材料来增加载荷与地面之间的静摩擦系数,在滑移发生前增加最大的接地角度[11]。相比之下,混凝土通常用作建筑表面,其与铝表面的摩擦系数为0.54-0.7[12]。类似地,钢钢接触通常有一个超过0.3[13]的静摩擦系数。在使用0.21静摩擦系数的情况下,本文所演示的控制器的性能应该与具有较高静摩擦系数的结构相比较。
表1实验参数
6轨迹跟踪
在Simulink模型中开发了一种轨迹跟踪控制器,以评估起重机的性能。这种类型的控制在现有的起重机系统上是最容易实现的,因为不需要传感器。此外,这种控制策略需要最少的训练时间,因为操作者只需按下一个按钮就可以开始移动。一旦行动开始,它就完全自动。轨迹跟踪控制器使用定义的约束来为小车和升降机描绘速度轮廓。本研究采用两种PID控制器开发了图3所示的最优升力轨迹;一种是将电车位置推到负载轴心点,另一种是通过调整负载长度使吊钩角度保持在零。
控制器设计的约束条件是确保零超调,同时使总上升时间最小化。两个PID控制器的增益,如表2所示,使用Simulink提供的内置PID调优功能进行调整。图3中的小车和载荷运动轨迹曲线如图4所示。
为了与实际起重机的仿真轨迹相匹配,需要进一步调整轨迹曲线。由于升降机和小车运动中的非线性不包括在模拟中(例如,钩关节的摩擦,提升小车的动力等),所以需要进行外扩。这些简化的速度剖面上的小误差意味着负载要么是:(1)在负载完全垂直之前从斜坡上被提升,或者(2)沿着斜坡被拖拽。这两种情况都造成了巨大的振幅载荷摆动,并可能损坏负载。因此,对于轨迹跟踪控制器来说,这是一个关键步骤,并且需要在初始条件改变时实现。
图3模拟小车和负载的数据
图4吊钩和小车的模拟速度
7半自动控制:
在起重机操作员完全控制起吊方向的地方,设计了一种用于操纵起重机的更实用的控制器。该方案的反馈控制部分应用了一个PID控制器,以使小车位于有效负载的上升边缘之上,而不受操作者的输入影响。这是通过吊钩角度的反馈来完成的,通过PID控制,使小车位置得到更新,使吊钩角度最小。
为了监测小车与负载上升边缘之间的相对位移,将一个光学传感器固定在小车底座上,并将一个反射标记放置在吊钩上。PID控制器采用与轨迹跟踪方法相同的三次误差法进行调优(即以最小起升时间为零)。这些控制增益如表3所示。
如果起重机操作员继续保持起升的命令,而负载在8度的斜坡上开始,那么小车和负载的轨迹应该与图3中的剖面相似。通过允许起重机操作员控制提升速度,系统可以对不可预测的环境干扰做出反应,否则将无法测量。这会降低有效负荷和附近工人的安全风险。
表2轨迹跟踪控制器的PID增益
表3半自动控制器的PID增益
8能量稳定性分析
通过对整个升降系统的势能进行分析,分析了系统的稳定性。系统的最大允许能量是当质心高于轴点时,如图5a所示。
图5b中能量稳定裕度由系统的势能控制:
(7)
当负载接近垂直位置时,边缘稳定性呈非线性降低。在负载的动态运动中,除了势能,我们还需要考虑系统的动能,还需要进一步降低稳定性的最值。因此,为了在系统的动态运动中保持稳定,负载角度的速度()需要随着载荷接近垂直位置而减小。
造成不稳定的原因是摩擦力和约束摩擦的反力。为了解决这种不稳定性,在载荷到达预定高度后,在负载提升速度线性降低的地方创建了一个速度外壳。通过限制升降机速度,减小了吊钩振荡和失稳条件的发生。在设计轨迹跟踪和半自动控制时,也考虑了速度的降低。在半自动控制的情况下,起重机操作员可以根据他们的观察来调整外壳。对于我们的系统,当负载高度接近负载长度的60%时,升降机速度开始下降,当负载高度约为负载长度的85%时达到最小速度。本研究中使用的速度包络线如图6所示。
为了评估轨迹跟踪和半自动控制的稳定性,在0、4、8和12度的倾斜角度对响应进行了评估。如果倾斜角度大于12度,负载将克服摩擦力,在测试开始前滑动。因此,一个12度的倾斜被设定为最大倾斜角度。
(a)当质心直接高于轴心点时负载方向 (b)载荷的标准化稳定性
图5
图6外壳设置为总负载长度的60 - 85%的演示
9结果与讨论
在评估控制器设计的稳定性之前,先通过改变倾斜角度比较在移动完成后剩余摆动幅度的大小,重要的是评估它是否有利于从载荷的上坡或下坡部分提升负载。同样的半自动控制器适用于倾斜和下降的情况。图7的结果显示,上坡(斜面)的最大摆动幅度为30mm,而下坡(下降)峰值为47mm。因此,当试图在提升过程中减少剩余摆动时,应选择在负载的上坡一侧安装吊钩。
图7倾斜角为8度时下降载荷提升设备的剩余摆动
图8负载从8度开始的剩余摆动
下坡时最大峰值振幅是由于负载在整个升力过程中无法在一个点上旋转。当从下坡一侧抬起载荷时,在靠近末端底部(横梁的横截面)与斜面完全接触的地方发生了一个力矩。提升负载会使载荷从表面开始,初始偏转角等于斜角,造成不必要的摇摆。
在分析图8中8度的摆动时,轨迹跟踪和半自动控制器都表现出类似的性能。与没有控制的情况相比,这两个控制器都降低了它的温度。在没有控制配置的情况下,起重机操作员试图在没有任何反馈控制的情况下提升负载。轨迹跟踪控制器降低了其峰值,无控残余波动为75%,半自动控制器降低了79%。
为了研究每个控制器的稳定性,表面倾斜角度取在0到12度之间的不同值。图9显示了使用轨迹跟踪控制器的响应。
图9轨迹跟踪控制器的稳定性分析
图10半自动控制器的稳定性性分析
将倾斜角度减小到4度和0度提高了发射的峰值振幅。这是因为当倾斜角度减小时控制器需要进一步提升负载,使其达到了与8度时同样的位置。如果负载在发射前没有完全垂直,则启动摆动运动。相反地,通过将地角增加到12度角,可以观察到低振幅的剩余摆动。这种低振幅是允许的;然而,负载在起飞时滑下斜坡,这可能会破坏载荷和环境,并且应该被认为是一个失败的条件。因此,轨迹跟踪方法缺乏对实际起重机运行所必需的稳定性。这是一种基于固定负载长度和倾斜角度计算吊装长度的轨迹跟踪方法。该计算与倾斜角的正弦值成正比,可以看出,4度倾斜角度的改变要求提升长度相对7%的变化。
为了提高轨迹跟踪控制器的稳定性,可以在每次发射前测量地面角度(),并计算出新的轨迹轮廓。然而,由于直接从模拟到起重机的运行轨迹需要进一步的手动调优来优化性能,这种方法对于工业应用来说是不切实际的,所以在我们的实验中没有执行。在发射过程中负载的稳定性可能会不可预测。
在图10中使用半自动化控制器来检查性能,表明它比所有非零角度的轨迹跟踪方法更加稳定。
在0度倾斜的情况下,相对于表面载荷角度需要达到90度。为了使系统达到这个期望值,起升高度需要保持增加直到运动的结束,为了使负载有足够的松弛,并在轴点上旋转最后在斜坡上稳定下来。然而,起重机操作员继续提升负载,负载将以一个小的初始角度离开地面。
对于每个倾斜角度,半自动控制器改进了轨迹跟踪方法的性能。事实上,半自动控制器在所有非零倾斜角度上保持了相同幅度的剩余摆动幅度。起
全文共7993字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[17018],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

