
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
使用样条插值的汽车式移动机器人的最佳轨迹生成
Rahee Walambe Nipun Agarwal Swagatu Kale Vrunda Joshi
PVG工程与技术学院的,浦那(
印度(电子邮件:rahee.walambe@gmail.com)
文摘:本文以一辆汽车为例,重点介绍了基于样条轨迹的轨迹生成和运动规划。汽车类型的车辆可以被建模为一个具有横向运动约束的非完整系统。基于样条轨迹的轨迹产生了连续、平滑和优化的路径轨迹。基于非完整运动规划算法的模型车式机器人在本质上是不同平。我们的贡献在于花键的发展基于轨迹克服参数产生的奇点的微分平坦的基础方法。样条轨迹也注意到在优化过程中观察到的奇异点,如果实现了三次多项式的插值。给出了汽车型号模型的硬件实现。利用微分平坦的概念,我们推导出控制输入,引导车辆沿着这个轨迹。
copy;2016,IFAC(国际自动控制联合会)举办由爱思唯尔有限公司保留所有权利。
关键词:非完整、微分平坦,车型车辆。时间参数化,样条多项式。
- 介绍
在过去的几十年里,由于对移动机器人的兴趣越来越大,一些自动导航算法已经发展起来。自动车辆在不同的领域从客车到危险的应用。为了使车辆在给定的工作空间中顺利机动,精确的规划(运动和路径)算法是必不可少的。有很多种方法来表示和机动无碰撞(容许)配置工作区。Latombe(1991)详细介绍了这些。虽然这些方法适合于全息的任务,但它们并不适用于一般的运动规划问题,因为它们的约束是不完整的。非完整运动规划系统即使没有障碍困难的问题是由于不可积分的速度限制。Rouchon 等人。(2011),Lamiraux等人 .(1999)、拉米雷斯和阿加瓦尔(2004)提出了一种方法在微分平坦可以有效地找到这些系统的解决方案。微分平坦方法的重要方面是,它可以用来产生控制输入没有数值近似和集成系统的微分方程。简单来说,平面度代表拉米雷斯中讨论非线性系统的可控性和阿加瓦尔(2004)。
默里等人。(1994)使用“构成#39;transformation运动规划问题并找到解决方案通过使用控制整体相关的正弦信号输入。汽车类型系统也可以被证明为幂零,因为较高阶的导数消失了,而路径可以用分段常数输入来导出。路径中给定的初始配置和最终的配置在蒂尔伯里。(1995)平滑由于采用多项式插值方法。劳蒙德等人(1994年)使用里德和谢普(1990年)讨论的里德和谢普模型,将基于网格的规划与非完整的约束相结合。虽然这些方法杜宾(1961、1957)和芦苇和谢普(1990)给我们最短路径加入任何两个配置,这些路径的主要缺点是他们的曲率不是连续的。因此,这样的车辆必须在每一个不连续性的情况下停下来。g在直线和圆形段之间的过渡,重新定位它的轮子,然后向前移动。在巴尔齐(1996)杜宾(1961)和里德和谢普(1990)中,汽车被认为是一个类似于物体的点,而最佳路径通常是起点和终点之间的最短路径。从那以后,这个飞行器被假定为一个点像物体(粒子),它被允许绕着方向旋转,沿着目标点的方向。然而,在现实世界的汽车中,情况并非如此。这就是为什么纯几何方法为全息系统制定的运动计划并不直接适用于非完整的系统。在非完整模型中,应用了约束条件,并从开始到目标点规划了平滑路径。由此产生的路径是真正的汽车可以跟随的路径。指导方法给出了一种解决路径规划问题的控制算法。这个工作的想法是使用基于三次样条的插值来实现轨迹的生成。而不是一个标准的三次多项式插值、样条插值,点值和前两个衍生品(但不是第三)在给定的lsquo;nrsquo;点连续。在端点上零二阶导数使其自然。它是所有可能的插值曲线中最平滑的一种,它最小化了二阶导数的平方的积分,从而给出了更平滑和优化的轨迹。
在此工作中,我们将路径的优化与样条插值结合起来生成轨迹。最初,我们设计了使用三次多项式插值的轨迹。基于平面规划中出现的奇异性由时间-参数化佩德罗萨等人 .(2003年)处理。这并不能为所有的角约束的情况提供解决方案。因此我们制定使用SIP(半无限)优化问题寻找优化的路径(最小长度)。
在我们的例子中,目标是最小化路径的长度。可以看出这三次多项式优化配方不生成轨迹在某些组合的初始取向theta;0和最终取向theta;f(如。平行停车情况theta;0和theta;f一样)。在这种情况下,奇点的出现并没有给出所需的轨迹。因此,我们实现了基于样条插值的轨迹,它克服了这个优化奇点问题,产生了平滑和连续的路径。另一个贡献是设计样条插值本身,通过优化上面所述的SIP问题,在开始和结束点生成斜率。我们通过对目标函数的优化来生成结点(开始和结束)的斜率。
论文的组织如下:第2节给出了汽车的非完整模型。第三节讨论了基于微分平坦的非完整运动规划的详细运动车。对于这类系统,一些奇异性总是与微分平坦属性提供的参数化。在罗琼等人(2011)、拉米雷斯和阿嘎沃尔(2004)中所示的一种叫做“时间-参数化”的属性用于处理这种奇异性。在第4节中讨论了使用优化和样条插值来实现两点之间的路径规划。这一领域的具体工作在这一节中突出显示。在第5节中讨论了硬件实现,以及结果。第六节讨论结论。
2。汽车式机器人的非完整模型
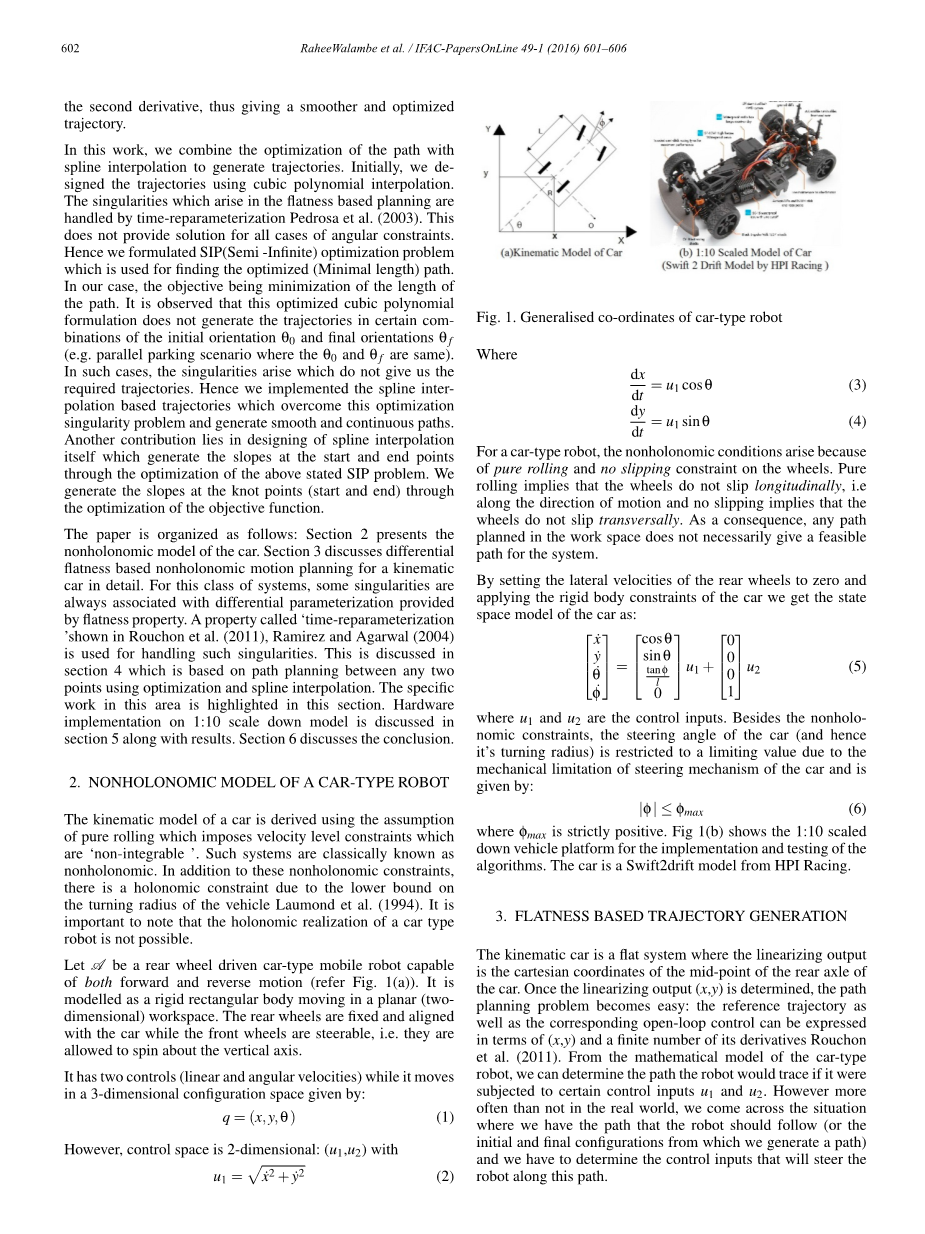
汽车的运动学模型是利用纯滚动的假设来推导的,它将速度级约束强加于“不可积”。这种系统被经典地称为非全息。除了这些非完整的约束之外,这是一个完整的约束,因为在汽车的旋转半径上的下界。需要注意的是,汽车型机器人的全息实现是不可能的。让一个后轮驱动的汽车式移动机器人能够向前和反向运动(参考图1(A))。它被建模为一个在平面(二维)工作区中移动的刚性矩形体。后轮是固定的,与汽车前轮可操纵的,即它们允许绕垂直轴旋转。
它有两个控件(线速度和角速度)虽然在一个三维构型空间:
然而,控制空间是二维的:(u1,u2)
(a)汽车的运动模型
(b)1:10的汽车模型
(HPI赛车的swift 2漂移模型)
图1所示。汽车式机器人的一般坐标
对于一个汽车型机器人来说,不完整的情况是由于纯滚动和车轮上没有滑动限制而产生的。纯滚动意味着车轮不会纵向滑动,我。沿着运动的方向,没有滑动意味着车轮不会横向滑动。因此,在工作空间中规划的任何路径并不一定为系统提供一条可行的路径。通过将后轮的横向速度设置为零,并应用汽车的刚体约束,我们得到了状态
汽车的空间模型:
u1和u2是控制输入。除了非完整的约束外,汽车的转向角(因此它的转弯半径)由于汽车的转向机构的机械限制而被限制为限值,并由:
在phi;max严格正的。图1(b)显示了实现和测试算法的1:10缩小的车辆平台。这辆车是HPI赛车的一款swift2漂移模型。
3。基于轨迹生成的平面度
运动车是一个平的笛卡尔坐标系统的线性化输出汽车的后桥的中点。一旦确定了线性化输出(x,y),路径规划问题就变得很容易:参考轨迹以及相应的开环控制的(x,y)和一个有限数目的衍生品罗琼等人。(2011)。从汽车型机器人的数学模型中,我们可以确定机器人在受到特定控制输入u1和u2时的轨迹。然而更多的往往在现实世界中,我们遇到的情况,机器人应该遵循的路径(或我们的初始和最终的配置生成一个路径),我们必须确定控制输入,将引导机器人沿着这条路径。
3.1微分平坦
微分平坦的概念引入了m·费利斯等人Lacute;evine(2009)。轮式机器人的特点,该系统是平面与平面(x,y)输出。方程(5)给出了汽车式机器人的运动学模型。
所有的变量都是时间相关的。它可以从
方程的模型(5),
标志的选择取决于我们是否想要向前运动( 标志)或反向运动(minus;标志)。
这给我们正确的象限中,theta;是1。
因此我们从方程(7)通过观察(10)控制输入u1和u2和状态变量phi;和theta;可以表示的平面输出及其衍生品。因此,通过对机器人输出轨迹的了解,即机器人在后轮的笛卡尔位置(x(t),y(t))中所需要的路径,我们可以计算出复制所需输出轨迹所需的控制输入。这些依赖于输出轨迹和它的第三阶导数。因此,为了保证它的精确再现性,笛卡尔轨迹的可微性应该是所有地方的3倍。
4。无障碍空间中两点间的路径规划
4.1轨迹规划
路径规划问题的目的是确定一个路径在配置空间移动机器人从起始位置到目标位置,同时避免与物体碰撞的工作区。基于平面变量,x和y,给定的初始和最终配置的车,我们构建轨迹x(t),y(t)。我们假设x(t)和y(t)为theta;(3)的三次多项式。
a0、a1、a2、a3和b0、b1、b2、b3都是常数。然而这种结构的缺点是系统不是一阶可控初始和最终点Lacute;evine(2009)。这是因为在这些点,车辆的速度是0rArr;0和˙˙x = y = 0。从方程(8)、(9)和(10)很明显,u2,theta;,phi;是没有定义在这些点。因此我们不能占汽车的初始和最终取向(theta;0和theta;f)和初始和最终转向角度(phi;0和phi;f)建设的轨迹。事实上任何点的轨迹x(tilde;t),y(tilde;t)在一个即时0le;tilde;tle;t f,控制和状态轨迹时没有定义u1(tilde;t)= 0。
4.2参数化的轨迹
避免情况的控制和状态轨迹是未定义的,我们使用参数化轨迹的路径描述分开计时信息佩德罗撒等人。(2003)。让这个参数用p表示(例如
弧长,或一个标准化变量tau;),让p = p(t)是历史沿着轨迹。因此,期望的输出轨迹以这个路径参数(x(p),y(p))表示,p本身是时间t的函数
现在。
同样的。
并且给出了伪速度卢卡等人(1998)的命令
由,
当质数表示路径参数的微分。实际的线速度是这样的,
因此,为了得到
我们列
因此,所期望的方向,然后计算为,
永远是定义良好的。同样避免零速度奇点在phi;和u2的表达式。
参数p的选择我们选择p作为一个正规的变量作为一个多项式函数。p是一个正规的变量,在区间[0,1]中取值,p和t之间的映射是这样的:
所有其他值0 lt; t lt; t的值都映射到对应的值0 lt; p lt; 1。其次,在p域和t域的状态轨迹之间有一对一的映射。这意味着在任何时候即时t =tilde;t这样0le;tilde;tle;t f
如方程(18)设置速度为0我们设置˙p = 0。同样可以证明加速度设置为0,我们必须设置uml;p = 0。因此我们在t中取p asa5阶多项式
满足以下初始和最终条件的位置,速度和加速度
解得
参数化多项式现在我们定义x和y平面输出多项式的立方p。因此让,
因此让他们初始条件(x0,y0,theta;0phi;0)和最终的条件(f f(x,y,theta;fphi;f)2和解决我们得到的系数:
此时
优化轨迹,我们因此有三阶多项式pathx(p),y(p),满足车辆的非完整约束和初始配置的链接
x(0)(0)theta;(0),phi;(0)的最终配置x(1),y(1),theta;(1),phi;(1)在一个障碍自由的环境。如果我们考虑任意初始配置x(p0),y(p0),theta;(p0),0和最终配置x(pf),y(pf),theta;(pf)、0 x可行路径(p),y(p)在自由空间可以加入这两个点可以得到类似的分析。但是它不一定满足曲率约束,即上限(phi;max)转向角phi;(p)、forall;pisin;[0,1]。如果违反了约束在phi;,车辆将无法执行所需的轨迹,当受到相应的控制输入
u1和u2。同样,这个分析所产生的路径不一定是最小长度的路径。因此为了生成一个路径不违反约束phi;和最小长度,我们修改系数a0,hellip;,b3使用一个优化例程。我们的目标是最小化路径的长度。因此我们的目标函数是:
为了简单起见,我们使用了目标函数埃格施泰特等人。(1997):
(25)和(26)的等价性可以被证明为每一个Laumond等人(1994年)。约束是初始和最终的配置和限制转向角作为|phi;(p)|le;phi;maxforall;pisin;[0,1]。因此考虑到初始配置x(0),y(0),theta;(0),phi;(0)和最终配置x(1),y(1),theta;(1),phi;(1)优化
问题可以陈述为:
受约束
这个问题被称为半无限规划(SIP)的问题,因为它是一个优化问题与有限数量的变量,a0,a1,a2,a3,b0,b1,b2,b3和无限数量的限制,|phi;(p)|le;phi;maxforall;pisin;[0,1]。
的问题也可以解决两个任意初始和最终的条件
x(p0),y(p0),theta;(p0),phi;(p0)和x(pf),y(pf),theta;(pf)、phi;(pf)。
样条插值上面的轨迹规划与优化不为某些配置生成解决方案开始(theta;0)和结束(theta;f)方向,特别是在这种情况下,这两个方向是平行和反平行
对方。为了克服这个缺点,开发了基于样条线的轨迹。多项式的基本结构与方程(11)和(12)一样。然而,该方法的计算系数的变化。所需的数据
构造多项式加入配置(x0,y0,theta;0,0)和(x f,f,theta;f,0)作为参数p变化从0到1是x(0),x(1),y(0),y(1),
但是初始和最终值的dx / dp,dy / dp是未知的。但是我们确实有价值dy / dx = tantheta;p = 0,p = 1。扩大的链式法则
考虑两个任意常数k0和kf,让我们重新写出上面的表达式
因此,我们把
并且
类似的
现在所有的系数x(p)和y(p)可以写成k0和kf。从k0 = kf = 1开始,我们解决了优化问题,最小化了目标函数
在方程(27)受约束|phi;|
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[488248],资料为PDF文档或Word文档,PDF文档可免费转换为Word

