英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
一种采用电气方式的节能型压力补偿液压系统
摘要
移动液压系统正朝着更好的控制性能和更高的能源效率发展。控制控制孔上压降的压力补偿器广泛用于多传动器系统中以提高可操作性。然而,额外的能量也消耗在补偿器中,特别是在超负载条件下。本文提出了一种新型节能系统,其中补偿器被设计为由液压马达和发电机组成的再生装置。然后,通过使发电机的电磁转矩适应负载,液压能量可以被再生并使压力补偿功能被实现。发电机的闭环控制是通过有效的压降估算来设计的。所提出的节能系统和控制器是在具有电能储存装置的混合动力挖掘机的实验平台上实施的。实验结果表明,控制性能好,节能效果显着。
关键词:节能,混合动力系统,液压执行器,压力补偿,再生。
一、导言
近年来,能源危机和环境污染已成为世界不得不面临的严重的问题。各国在各个领域花费了大量精力来节约能源和减少排放。虽然液压系统广泛应用于工业,但效率非常低,效率从6%到40%不等。因此,挖掘液力变速器的节能潜力是有意义的。
开发高效液压系统是节约流体动力能源的重要途径,通常分为两种类型。 一种是将泵的输出功率与所需功率相匹配,另一种是重新产生致动器的可回收能量,如制动动能和重力势能。
在第一种有效的系统中,典型的是负载传感(LS)系统,其已经被广泛地应用于移动式液压机器。LS技术的基本思想是通过最高负荷压力的反馈控制流量供应。然而,由于反馈控制,LS系统容易发生振荡,因此应仔细检查其阻尼和稳定性。在传统的控制阀中,入口节流孔和出口节流孔机械连接,这在一些工作条件下会导致额外的计量损失。LS系统的一个步骤是将带有单滑阀阀门中的计量控制孔去耦以节省更多能量。泵控制系统是一种比节流调节系统更高效的系统,因为在主液压管路内完全消除了节流损失。但是由于存在非线性和高阶动态特性,这个系统导致了控制器设计的挑战。
能量再生可以通过三种方式实现:交叉连接,液压储存和电储存。姚和刘研究了一种节能电动液压系统,其中单杆气缸由五个独立的插装阀控制。四个阀构成一个单独的计量系统,另外一个控制气缸两个腔室的连接以进行能量回收。液压储存方法是将可回收能量转换为液压形式,将其存储在蓄能器中,然后通过辅助部件或辅助油缸释放。由于液压蓄能器通常需要较大的安装空间,增加其能量密度将显著改善其利用率。在电再生系统中,可回收能量被转换成电气形式,可以直接传递给任何电动执行器。因此,对于配备电池或超级电容器的混合动力或电力驱动液压机器来说,这是一种合适的节能方法。然而,当大型移动机械如挖掘机中液压执行机构的可控性受到发电机转速而不是阀门开度的控制时会变得更糟。
良好的控制性能也是液压系统追求的重要方面。在单泵多执行器系统中,压力补偿器通常用于控制控制孔上的压降,从而减小负载变化的影响,因此几乎不需要交叉对话就可以操作不同的执行器。然而,缺点是泵应提供使用补偿器所消耗的额外能量,特别是在超负荷条件下。
本文提出了一种将压力补偿器和电再生装置组合在一起的节能型压力补偿液压系统。该系统可同时实现压力补偿和能量回收功能。可回收的能量(包括过量的泵供应和外部输入如重力势能)转换为电子形式,并在需要时重新使用。再生装置主要由液压马达和矢量控制发电机组成。通过使发电机的电磁转矩适应负载,将计量孔口上的压降控制到相对较低的水平。无传感器闭环控制器是基于有效的压降估算而设计的。最后,提出的节能系统和控制器在各种工作模式下的混合动力挖掘机实验平台上进行了测试。实验结果表明,控制性能好,节能效果显着。
本文的其余部分安排如下。系统方案在第二部分介绍。绩效分析见第三节。第四节给出了实验设置和评估,第五节得出结论。
二、系统方案
A.配置
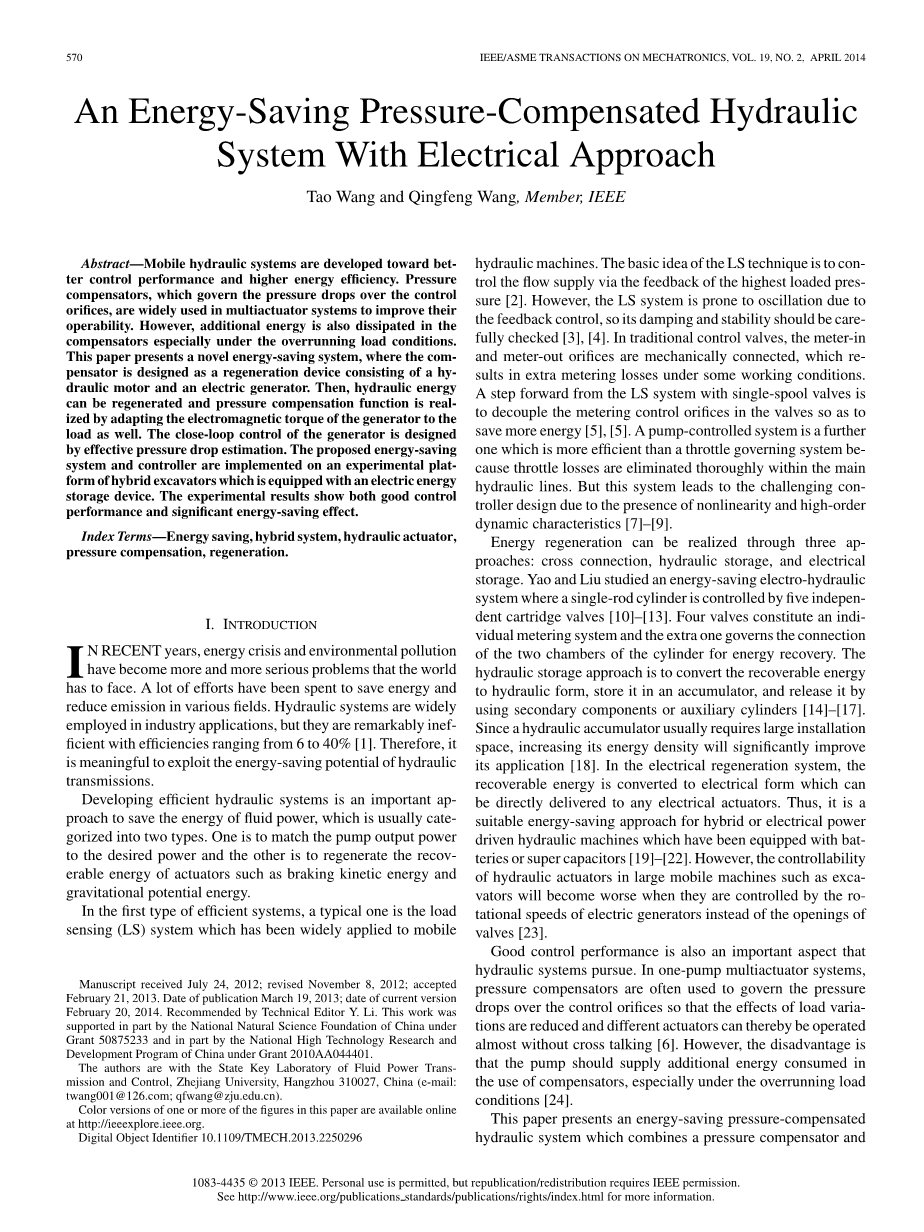
本课题研究的基本思想如图1所示。它旨在同时实现压力补偿和能量再生的功能。在所提出的结构中,将传统的减压阀替换为由液压马达和同轴耦合的发电机组成的再生装置。
图2显示了所提出的液压系统的示意图。它可以用于多个执行器一起工作的应用中。此外,当两个执行机构之间的负载差异较大时,节能更为可观。负载条件可以是超载或阻力,这是由外力的方向和大小决定的。供油通过梭阀采用最高的负荷运行负荷,并将泵压力设置为主要负荷压力和恒定余量之和。液压马达和发电机用于将液压能转换成电子形式并提供补偿压力。为了使系统紧凑和高效,由于其高效率和功率密度,轴向柱塞液压马达和永磁同步发电机是优选的候选者。通常使用电池和超级电容器作为普通的电能储存装置。将该系统应用于混合动力或电动力驱动的液压机是相对经济的,因为该机器已配备电能储存装置。否则,存储设备的额外成本将削弱所提出系统的节能优势。
B.可回收能源
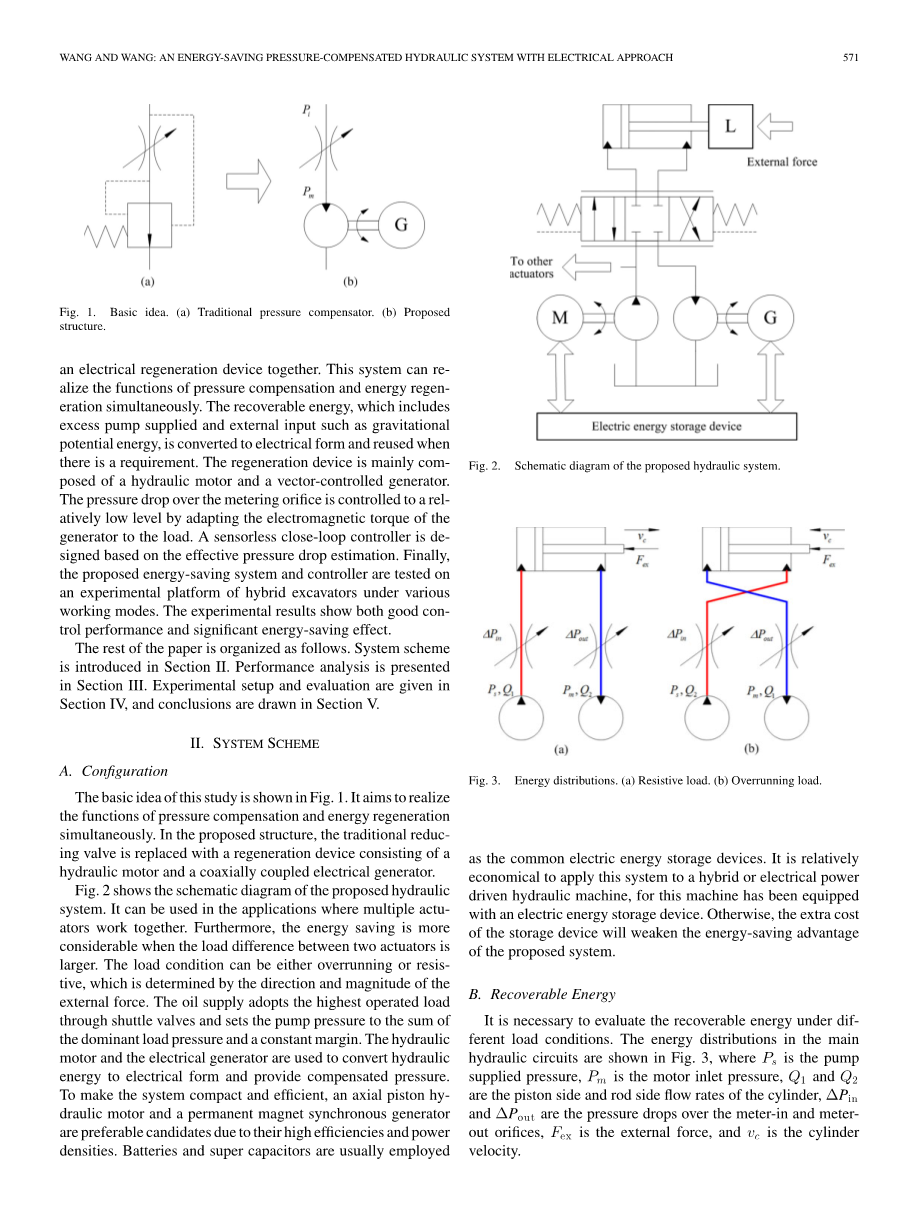
有必要评估不同负载条件下的可回收能量。主要液压回路中的能量分布如图3所示,其中Ps是泵供应压力,Pm是电机入口压力,Q1和Q2是气缸的活塞侧和杆侧流速,和分别是在入口和出口节点上的压力下降,是外力, 是气缸速度。
忽略摩擦和泄漏损失,电阻负载下的可恢复能量可表示为
在超载负载下,表达式写为
根据(1)和(2),可以观察到,当负载超出时,剩余的泵和外部输入能量都可恢复。但是当负载是电阻时,只有多余的泵提供能量才能被再生。此外,如果当前执行机构的负载压力最高,则不会有可恢复的能量,因为电源正好满足执行机构消耗的需求。因此,可回收能量与负载条件密切相关。
C.功能实现
如何将孔板上的压降控制在一个较低的常数是解决的关键问题。传统的液压补偿器采用来自调节孔两个端口的压力油作为先导供应。同样,一个直接的想法是使用压力传感器反馈的压降闭环控制,但它需要花费额外的硬件。这里开发了一种简单经济的方法来实现补偿功能,并描述如下。首先,基于矢量控制的永磁电机的转速信息计算通过节流孔的流量。其次,孔口上的压降根据孔口的逆流映射来估计。第三,调节比例反馈控制器来控制压降。
如图1所示,忽略油压,流量可以计算为
其中是转速,是位移,是液压马达的容积效率。根据实验测试,合理地忽略了的变化。建议查找表以获得更准确的结果,特别是当液压马达的泄漏流量相对较大时。
通过孔口的流量表示为
其中是孔口的流量增益系数,是阀芯位移, 是孔口上的压降。 在实验中,阀门的动态特性可以忽略不计,阀芯位移通过已知的静态映射与控制信号直接相关。因此,可以通过将计算出的流量代入(4)来估算压降,并给出
反向流动映射的精度可以通过孔口的规格和测试来保证,并且小的建模误差在一定程度上是宽容的。然后基于有效估计设计了一个简单的压降反馈控制器。 发电机的电磁转矩指令如下给出。
其中lambda;是比例增益,是所需的压降,其是预定的常数。从表达式中
可以看出,当孔口上的压降大于所需值时,发生器的再生转矩将增加以减小孔口的耗散。为了避免发电机过载或在电动机模式下工作,的值应在饱和上限和下限之间,即发电机的最大转矩和零点之间。
三、性能分析
A.稳态分析
传统的节气门控制单杆气缸的模型已经在[25]中很好地建立。与传统系统相比,建议的主要区别在于用加油器驱动再生装置而不是回油箱。因此,这项研究主要集中在如图1所示的再生装置上。孔口上的实际压降记为
其中Pi是节流孔的输入压力,Pm是液压马达的输入压力。
在稳定状态下,忽略摩擦力矩,再生装置扭矩平衡并表示为
根据(6)-(8)并用实际值代替计算的压降,可以得到下列表达式:
可以看出,当比例增益适当大时,压降接近预定的常数。然后,孔口的输入压力对流量几乎没有影响,并且再生装置相当于液压补偿器。
B.频率响应
线性化是在标称工作点进行的,以分析系统的频率响应。在线性模型中,通过节流孔的流量可以表示为
其中是线性流动增益,是流体压力系数。估计的压降如下给出
其中和分别是估计的压降与转速和阀芯位移的差值。
孔口与液压马达之间的腔室的流动方程如下给出
其中是容积体积,是液压马达的总泄漏系数,它是内部泄漏系数和外部泄漏系数之和, 是容器压力,近似认为是零。
再生装置的转子的动力学表达为
其中是总惯性矩,是库仑摩擦扭矩,是阻尼和粘性摩擦扭矩的组合系数。
(6)和(10)-(13)的拉普拉斯变换并求解页面底部所示的方程组(14),可以得到从输入压力到流量的传递函数。
从(14)可以看出,在低频范围内传递函数的幅度非常小,因为孔的流压系数通常远大于泄漏系数。在高频范围内,幅度几乎等于,这意味着压力补偿功能被禁用。因此,工作频率的设计应远离禁用的频率范围。有必要量化参数进行详细分析。
在工作点,为10 MPa,为。其他参数值如表1所示。图4显示了不同比例增益下的频率响应。可以观察到,随着比例增益的增加,幅度变小并且工作频率范围变窄。因此,控制参数的设计应考虑执行器的实际运动频率,以保证系统的压力补偿功能。比例增益的值在实验中选为12.0。
四、实验研究
A.实验平台
所提出的节能系统和控制器在混合挖掘机的实验平台上实现,如图5所示。
在平台上,气缸的活塞和活塞杆直径分别为0.115和0.065米。由发动机和电机组成的混合动力源驱动的泵最大可以在31.5MPa压力下每秒钟供应 液压油。比例方向流量阀的额定流量为。液压马达的固定排量为。泵,阀门和马达都是博世力士乐的产品。专为满足再生应用要求而设计的永磁同步发电机最大电磁转矩为160Nm。超级电容器是麦克斯韦产品,其容量和标称电压分别为6.25F和400V.该转换器是英飞凌的最大电流和电压为200A和600V的产品。实时控制算法在一个数字信号处理卡dSPACEDS1104。使用每转3200个脉冲的旋转位置传感器来检测用于矢量控制和流量计算的发电机的转子位置和速度信息。发生器的矢量控制和1kHz采样率为10kHz
在其他情况下。实验系统还配备了辅助传感器,包括用于监测系统状态的流量计,压力传感器,位移传感器,扭矩传感器以及电流和电压传感器。图6显示了平台的部分硬件。
B.基本动作测试
首先测试动臂油缸的一些基本动作。在实验中,泵的压力设定为14MPa,这可以在满载情况下提升悬臂。输入信号通过编程生成以进行比较。
图7显示了当铲斗为空时速度阶跃响应速度为0.02,0.06和0.10 m/s。图8显示了桶满时的结果。当动臂上升时,速度为正,当动臂下降时,速度为负。可以看出,该系统具有良好的动态性能,响应时间均小于0.5s。斜坡跟踪的实验结果显示在图9中,这表明测量的速度与命令值之间的误差非常小。图10显示了速度的连续方向变化。可以观察到,实际速度和位移平稳变化而没有振荡。它还表明,可以通过为阶跃输入信号添加适当的斜坡来降低过冲。
C.压力补偿功能
然后,进行实验来验证补偿功能。由于动臂油缸是单杆并且是不对称的,所以在动臂升起时,计量节流孔上的预定压降设定为0.5MPa,当下降时设定为2MPa。图11显示了速度为0.06米/秒时的实验结果。可以看出,实际压降接近所需常数,发电机转矩适应于负载压力。 再生能量由充电电流和电压变化表示。 如图11所示,在悬臂升高时,空载条件下的能量比负载条件下的要多。当景气下降时,结论恰恰相反。因此,实验结果与第二部分的解析表达式(1)和(2)一致。
图12显示了通过改变泵压力实现的模拟负载扰动下的实验结果。泵压从4MPa时的14MPa变为17,并在12s时回到14MPa。可以看出,虽然负载条件发生了变化,但是在整个工作台上的压降保持不变。另外,由于突然扰动引起的速度变化小于10%。
图13显示了挖掘操作的实验结果。在此操作中,铲斗在下降过程中撞击地面。负载条件变成非常大的阻性负载,下降速度接近于零。因此,几乎没有能量可以恢复。如图13所示,一旦撞击发生在4秒,杆侧压力迅速增加并且活塞侧压力降低。发电机的转矩控制指令饱和为零,因为计算的压降比预定值小得多。因此,在所提出的系统中可以很好地执行挖掘操作。
D.节能评估
为了评估节能效果,一些定义如下:
其中是泵供应的能量,是泵流量,是汽缸能量消耗,是液压马达入口腔室中的可回收能量,是超级电容器中的再生电能,和是超级电容器的电压和充电电流。应该提到的是,当外部输入能量大于气缸中的摩擦损失时,气缸能量消耗为负值。
考虑到总体上升和下降周期,与效率有关的一些指标被定义为
其中表示可回收液压能量与泵供应能量的比率,表示再生装置的能量转换效率,表示总再生效率。
当动臂油缸分别以0.06 m/s的速度上升和下降3s时,计算能量分配。 研究了空载和加载条件,结果如表2所示。在两种负载条件下,再生能量的总量大致相等。表III显示了效率的详细
全文共5560字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15967],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

