英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于选择性驱动机构的管内机器人
Se-gon Roh, Do Wan Kim, Jung-Sub Lee, Hyungpil Moon, and Hyouk Ryeol Choi*
摘要:本文介绍了一种名为MRINSPECT V(用于管道内视图V的多功能机器人履带)的管内机器人,该机器人正在开发中,用于检查内径为8英寸的管道。为了在每个管道元件中自由行驶,机器人采用了我们开发的差速驱动机构。此外,MRINSPECT V通过引入离合器将驱动力传递给车轮,能够根据管道的形状选择合适的驱动方式,并节省管道中的能量。在本文中,所提出的机器人的设计和建造的关键点在初步结果中进行了描述,其产生了良好的机动性和提高的效率。
关键字:离合器,差速驱动,管内机器人,选择性驱动。
1.介绍
应有多种管道进行检查和维护,以确保其安全性和完整性。到目前为止,已经有许多研究人员开发出可以驱动管道内部的机器人。一般而言,管道内部具有狭窄的空间和尺寸形状的特殊条件。此功能限制了机器人的大小和形状,并使机器人难以平稳移动。因此,有必要开发一种可在每个管道元件中自由移动的管道式机器人。为此,对机器人的各种机制进行了研究[1-7]。其中,轮式和墙压式组合的机器人类型显示出最有效的机动性。对这类机器人最具代表性的研究之一是由冈田和卡纳德开发的FERRET-1机器人[8]。 FERRET-1通过三个轮子在管道内移动,就像一个可伸缩的移动物体,可随着管道直径的变化调整其高度。同时,三点驱动轮接触式的另一个移动机器人MOGRER被设计成能够通过应用基于弹簧的连杆结构来适应管径的变化[9]。最近的机器人开发包括由CMU,NREC和NASA开发的探测器 - 由单个模块组成的铰接结构。它可以主动控制与车轮连接的臂,并调整管道内部与其车轮之间的压力。 Explorer也可以用于6英寸和8英寸的管道[10]。KANTARO设计用于下水道管道的自主导航,它具有一种新型的被动-主动运动机构,其中四个水平轮通过弹簧相互连接[11]。这种机构使得机器人在曲线或交叉点处具有平滑和稳健的运动,而无需任何控制和传感器读数。Hirose等人 介绍了他们有关各种管道检测机器人的研究成果[12]。以前的管内机器人可以在直行和弯曲管道内行驶,但在支管内很少转向。 其中大多数是在没有考虑驾驶效率的情况下设计的[1-21]。MRINSPECT V是本研究中引入的管道内机器人,它具有改进的移动性,可以在各种管道元件内部移动,还可以根据管道内部的情况灵活地改变其驱动力。这两种功能都可以使机器人在所有类型的管道元件上更有效地行驶。MRINSPECT V是我们开发的MRINSPECT系列的第五款型号,专为8英寸天然气管道检测而设计。MRINSPECT系列采用轮和墙压结构组合。特别是其伸展机构可以减小由于管道直径变化引起的车轮之间的压力差[22]。MRINSPECT II和III允许在分支中进行选择性转向,因为它们将由Double Active Universal Joint操作的转向模块连接到驱动模块[22-23]。与以前的车型不同,MRINSPECT IV可以仅通过驾驶模块同时驾驶和驾驶,因为它采用了差速驱动算法的概念,可以独立控制每个驱动轮; 因此,不需要额外的转向模块[24-26]。新型号MRINSEPCT V也配备了类似于MRINSPECT IV的机械结构。这种机械结构允许差速驱动。此外,MRINSPECT V采用了基于离合器的新型驱动算法 - 选择性驱动算法的概念,改进了驱动单元的动力传输机制,提高了管线内部的移动性和驱动效率。
本文介绍了MRINSPECT V的特点及其机械结构和动力传动机构,实现了该功能。 此外,还提出了一种新的驱动算法 - 选择性驱动算法。 最后,MRINSPECT V的有效性通过实际管道中的实验来验证。
2.MRINSPECT V的特点
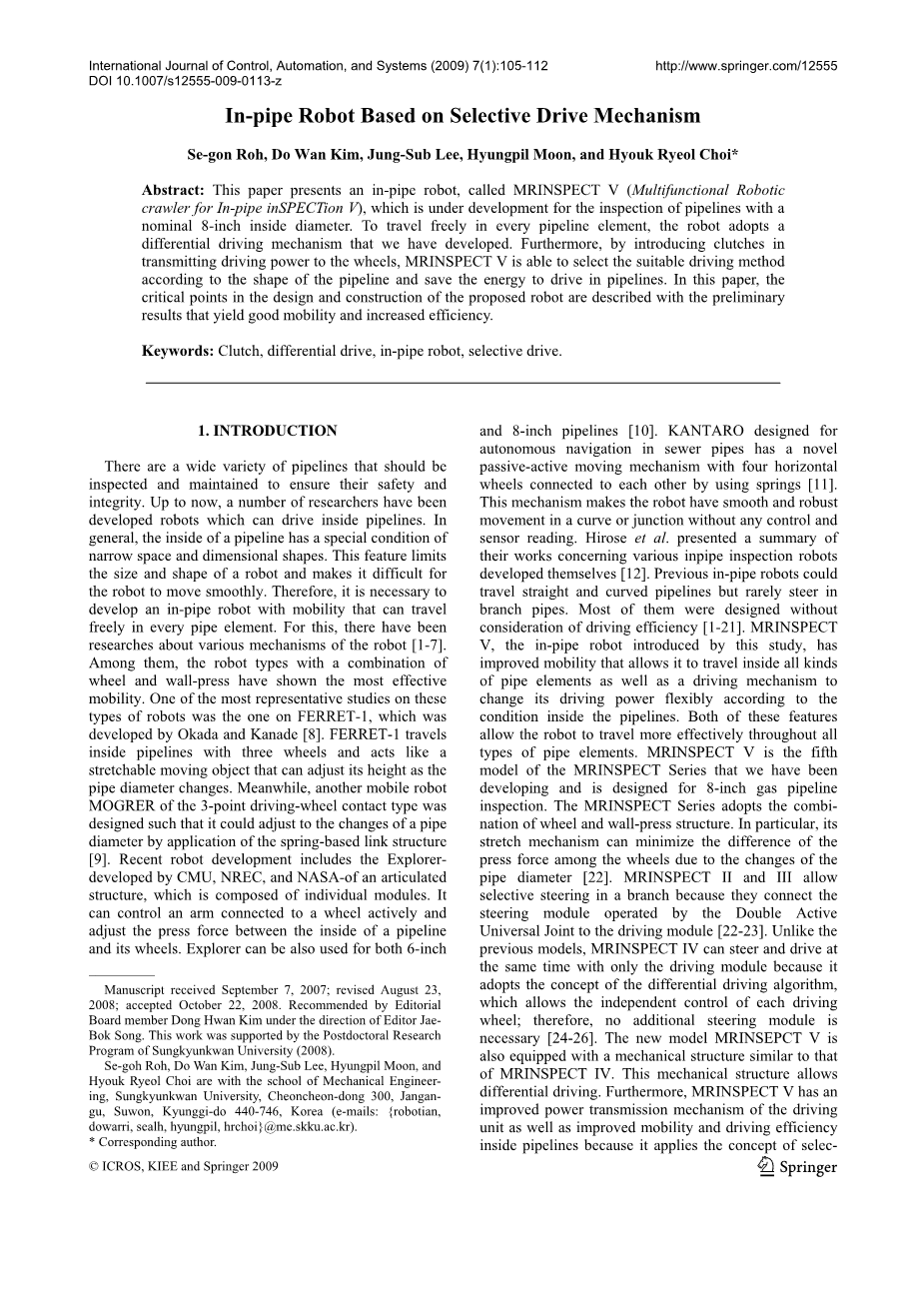
如图1所示,MRINSPECT V的整体结构由径向形状组成,其中车身框架由120个间隔的三个驱动单元环绕,驱动单元连接到墙壁连接的连接弹簧结构,按下车轮。 尽管MRINSPECT V在驱动单元内部设有一个离合器,其基本配置与之前的MRINSPECT IV型号相似,但允许在驱动电机和车轮之间进行功率控制。 图1 MRINSPECT V
由于动力传输通过离合器控制被切断,所以车轮可以自由旋转而不与驱动马达结合。 当怠速状态驾驶模式应用于车轮时,用户可以在机器人发生故障或由于意外障碍物而将管道隔离时收集机器人(参见图2(a))。
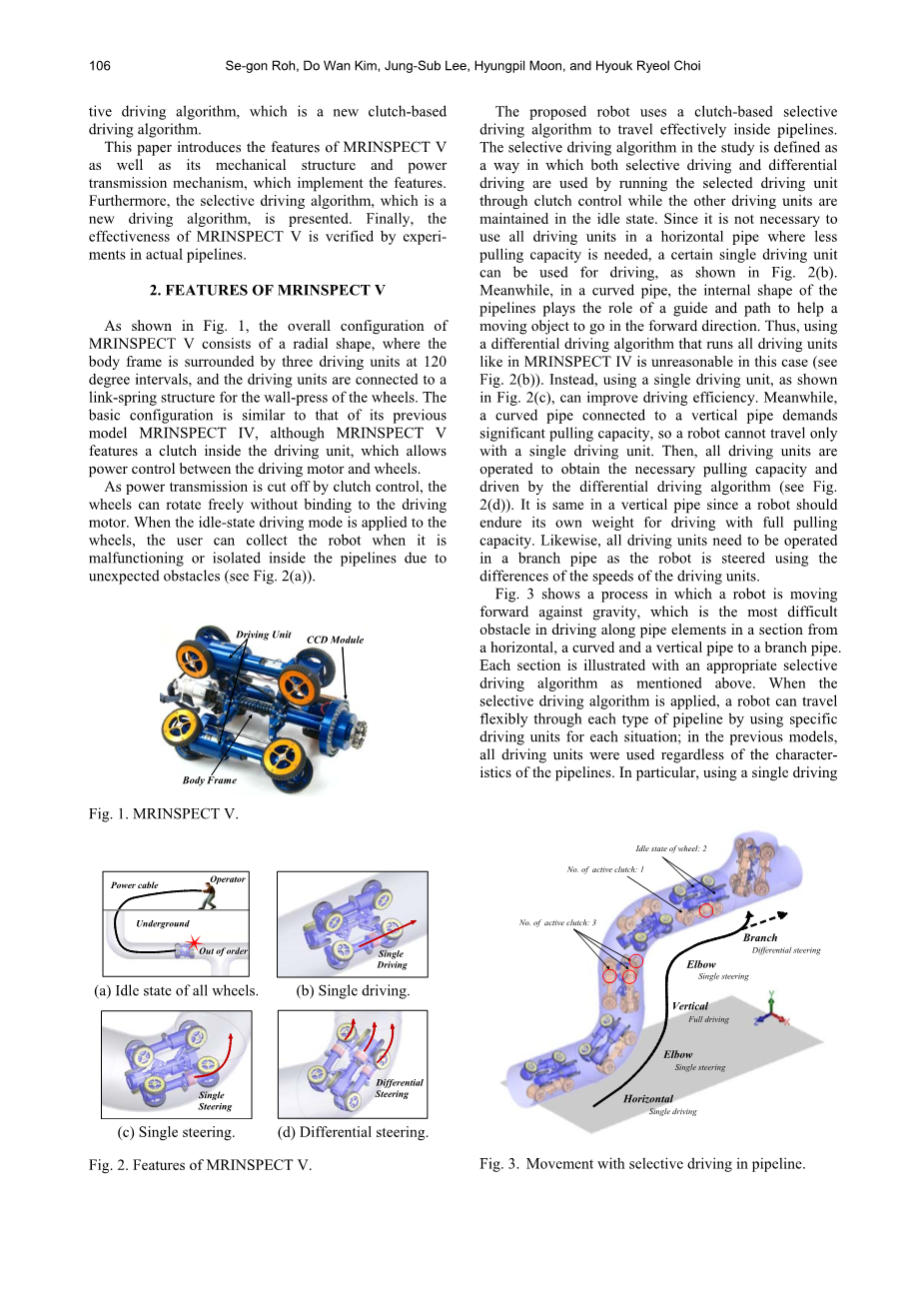
所提出的机器人使用基于离合器的选择性驱动算法在管道内有效地传播。研究中的选择性驱动算法被定义为通过离合器控制运行所选择的驱动单元而使用选择性驱动和差分驱动两者同时其他驱动单元保持空闲状态的方式。由于不需要在需要较少牵引力的水平管道中使用所有驱动单元,因此可以使用某个单一的驱动单元进行驱动,如图2(b)所示。同时,在弯管中,管道的内部形状起着引导和路径的作用,帮助移动物体向前走。因此,在这种情况下使用运行MRINSPECT IV中的所有驱动单元的差分驱动算法是不合理的(参见图2(b))。相反,如图2(c)所示,使用单个驱动单元可以提高驱 图2 MRINSPECT V的特征
动效率。同时,连接到垂直管道的弯管需要很大的牵引能力,因此机器人不能仅通过单个驱动单元行驶。然后,操作所有驱动单元以获得必要的牵引能力并由差动驱动算法驱动(参见图2(d))。垂直管道中的情况也是如此,因为机器人应该承受其自身的重量以便在全拉力下行驶。同样,所有的驱动单元需要在分支管道中操作,因为机器人使用驱动单元的速度差异进行操纵。
图3示出了机器人相对于重力向前移动的过程,这是在从水平,弯曲和竖直管到分支管的截面中沿管道元件驱动时最困难的障碍。如上所述,用适当的选择性驱动算法来说明每个部分。 当采用选择性驱动算法时,机器人可以通过每种情况灵活运行通过每种类型的管道, 在以前的型号中,不管管线的特性如何,都使用所有的驱动单元。特别是对于不需要巨大牵引能力的管道使用单个驱动装置,可以提高动力效率。在能源效率方面,这种驱动装置的选择性使用对于自由行驶的管道内机器人来说是一个非常有用的因素,该机器人使用电池作为独立电源。
图3 在管道中选择性驾驶运动 图4 潜水装置结构
3.驾驶室内部配置和离合系统
本章介绍新设计的驱动单元的结构及其用于执行前一节中介绍的选择性驱动算法的动力传输机制。每个驱动单元配有减速器,带编码器的直流电机,离合器,齿轮和后驱动动力传输轴。另外,前后各有两组轮子,一个滑轮和一个驱动单元外的箱子。与MRINSPECT IV不同,直流电机的功率通过齿轮系直接传递给车轮,MRINSPECT V可以通过在电机和齿轮之间增加的离合器切断或恢复动力传输。
此外,MRINSPECT V使用螺旋锥齿轮为车轮轴提供动力。由于传动装置没有特定的动力传动方向,当离合器切断动力时,即使稍稍施加外部动力,驱动轮也可以空转和独立运转。 图5示出了机器人的磁性离合器的结构。打开电源会在离合器主体内部的线圈中产生强磁场,并且该磁力使输入板粘到输出板上。当电源关闭时,磁力消失,因此输入板和输出板再次被板簧分开。图6示出了连接到驱动单元的离合器的两个板彼此粘合然后分离的情况。输入板连接到电机的驱动轴,而输出板连接到与车轮的轴线接合的齿轮系。
图5 磁力离合器 图6 离合器行为
因此,如表1所示,车轮状态由电机和离合器的运动决定。表1的No.1和2表示当离合器上电时输入轴和输出轴连接时,车轮运动与电机相连。这意味着,与MRINSPECT IV的动力传动结构一样,当电机关闭时,轮子不能通过外部电源运行。无论电机的运动如何,离合器断电都将两个轴分开,并且车轮空转。因此,MRINSPECT V可以区分地设置轮子的空闲模式,并使用该模式实现选择性驾驶算法。
表1.轮子的状态。
|
clatch |
motor |
Status of wheel |
|
|
1 |
ON |
ON |
Wheel rotation |
|
2 |
ON |
OFF |
Wheel stop |
|
3 |
OFF |
- |
Idle state |
4.驱动算法
4.1直管式驾驶
先前的管内机器人允许每个驱动轮以相同的速度进行直管驱动(参见图7(a))。 但是,如果像水平管道那样需要大量的牵引能力,那么在功耗方面运行所有驱动单元效率低下,并且可能引起其他问题。
即使对于直管驱动,每个驱动单元的速度控制相同,但其机械特征不可避免地导致转速的微小误差。当管道直径变化时,驱动单元之间的车轮转数也可能有所不同。当每个驱动单元绑定到用于爬行的弹簧连杆结构时,这种不平衡可能导致车轮打滑或车轮强制旋转。 同时,它可以给驱动装置的内部元件(如齿轮,电机和离合器)带来物理过剩。由此产生的机械负载和驱动过程中产生的额外功耗(不仅在直管中,而且在弯管和支管处)都可以通过使用基于离合器的选择性驱动算法来提高。 前面的MRINSPECT IV在直管道中以相同的速度运行每个驱动单元,如图7(a)所示,MRINSPECT V只在三个驱动模块中运行一个驱动模块。 换句话说,它可以在一个驱动单元的牵引能力中在直管中行驶,因为它使其他驱动单元保持在空转状态。因此,可以消除由多个驱动单元的操作导致的车轮滑移的任何机械或电力负载。 另外,通过使用单个驱动单元可以节省电力。
图7 单车直行
4.2肘部驾驶
上述用于直管驱动的相同算法用于曲线管驱动,即关闭两个驱动单元的离合器并保持轮空转并且仅运行一个驱动单元。使用速比来驱动弯曲管道中的机器人的差速驱动算法也是有效的,但是当不需要全拉力时。换句话说,使用一个驱动单元的选择性驱动算法在各个方面在诸如从弯曲管到垂直下方管道的部分或重力没有冲击的水平弯曲管道的地方会更有利。因此,使用单个驱动单元可以节省能源和电力,并解决上述直管驱动引起的不平衡引起的负载问题。此外,我们可以跳过差分驱动算法中的控制过程,只需通过选择合适的驱动单元来计算每个驱动轮对机器人曲率和当前位置的速度比,而不考虑曲率半径。为了在弯管中实施所提出的选择性驱动,有必要确定三者之中将使用哪个驱动单元。选定的单个驱动单元应该具有相对于曲率半径中 图8 单肘驾驶
心的最大旋转半径,以获得最有效的驱动的最大牵引能力。为此,曲线管的移动方向与机器人的各驱动单元的位置之间的角度应该如图8所示; 我们需要知道标准驱动单元与机器人中心弯曲管的移动方向之间的角度btheta;。
如图9(1)所示,MRINSPECT V通过计算角度btheta;和距离L,根据前部CCD摄像机显示的图像确定弯管的移动方向,然后通过识别弯管区域的阴影来确定弯管的移动方向 通过安装在相机周围的LED进行区分。 三个驱动单元以120度间隔排列。 因此,从曲线方向起最远的驱动单元总是从反曲线方向的左侧和右侧60度内退出。 因此,我们可以根据给定的角度范围和与标准轴的角度为操作选择一个驱动单元。
图9图像使用方法选择单位
表2.驱动单元的选择。
|
角度范围 |
Unit a |
单位b |
单位c |
|
00 b 1200 |
关闭 |
上 |
关闭 |
|
1200 b 2400 |
上 |
关闭 |
关闭 |
|
2400 b 3600 |
关闭 |
关闭 |
上 |
4.3在分支驾驶
用于支管驱动的转向算法采用与MRINSPECT IV相同的算法。 当管道式机器人进入分支管道时,所有三个离合器都会操作向机器人传输动力,以便机器人可以转向所需的方向。 通过改变驱动单元的电机速度,它可以转向所需的方向。当机器人进入实际的支管时,通过CCD摄像机图像确定旋转方向,并且通过控制每个驱动单元的轮速来诱导机器人转动。 关于应用于支管驱动的差分驱动算法的更多细节可以从参考文献[26]中获得。
5
全文共12515字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11345],资料为PDF文档或Word文档,PDF文档可免费转换为Word

