
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于蚯蚓蠕动的工业内窥镜的管道机器人
最近报道了许多由腐蚀或变质引起的管道事故;因此,需要进行管道内检查来防止这些问题。纤维内窥镜目前被用作工业内窥镜来检查管道中的缺陷。但是,由于摩擦,它们不能插入长度超过15米的管道或弯管等复杂管道中。因此管道内检测机器人需要自行推进才能插入这些环境中。我们正在开发一种机器人,能够通过各种管道推动自己,例如长管和弯管,特别是使用DC无刷电机的蠕动爬行机器人进行管道内检查。在这项研究中,我们开发的机器人用于内直径为27毫米的直管和弯管。在本文中,我们推导出机器人运动速度和推进力的理论公式,并为机器人的蠕动爬行模式提出了一种称为中间运动模式的特殊运动模式。我们在27毫米直径的丙烯酸管中进行了多项实验,以检查运动速度和推进力。我们还开发了一种机器人,可以穿过肘部并进行实验性的实验。
关键词:蠕动爬行,管内检查,工业内窥镜,蚯蚓
1.介绍
许多国家使用管道作为输送水,天然气和石油的主要设施。最近报道了许多由腐蚀或变质引起的管道事故。因此,需要进行管道内检查以防止出现问题。纤维镜目前用作工业和内窥镜检查管道。但是,由于摩擦,它们不能插入长度大于15米的管道中,也不能插入弯头等复杂管道中。因此管道内检测机器人需要自行推进才能插入这些环境中。已经开发了用于管道检查的各种管道机器人。然而,现在每种机器人都有其不足之处。
例如,某种蛇状机器人[1]需要比自己更宽的空间来操作。 振动机构 [2] 无法退回。由于其复杂的结构,迄今为止开发的轮式机器人[3-5]具有最佳的减震性能。相比之下,蠕动爬行机器人已经被开发出来,其在管内检查中具有许多优点。它易于前后颠倒,机制简单。另外,即使管道直径发生变化,它也会继续推进。因此我们开发了几种蠕动爬行机器人[6-9]。但是,使用伺服电机缩小这些机器人的结构很有难度,这是因为其自身的性质决定的。此外,随着距离压缩机的距离增加,气动执行机构的速度降低。我们正在开发一种机器人,能够通过各种管道推进自己,例如长管水管,特别是使用直流无刷电机的蠕动爬行机器人和用于管道检查的螺钉。在本文中,我们开发的机器人用于内径为27毫米的直管。我们推导了机器人运动速度和推进力的理论公式,并提出了一种称为中间运动模式的特殊运动模式,用于机器人的蠕动爬行模式。我们还在直径27毫米的丙烯酸管中进行了多项实验,以检查运动速度和推进力,并开发了一种穿过弯管的机器人。我们进行了多方面的实验来证实这一点。
2.蠕动爬行
蚯蚓通过蠕动蠕动而移动,其中伸展和收缩的波浪通过节段的厚度和长度的变化在前后方向上传播。 图1显示了蠕虫的蠕动爬行模式。 首先,土壤蚯蚓通过收缩来增加土壤表面和土壤片段的含量。 发生这种情况是因为较厚的部分在运动过程中与正在爬行的表面接触,而收缩则向后传播。 这种运动在运动方向上拉伸。在收缩完成后,轴向在轴向上伸展。
3.用于直管道的管道内移动机器人
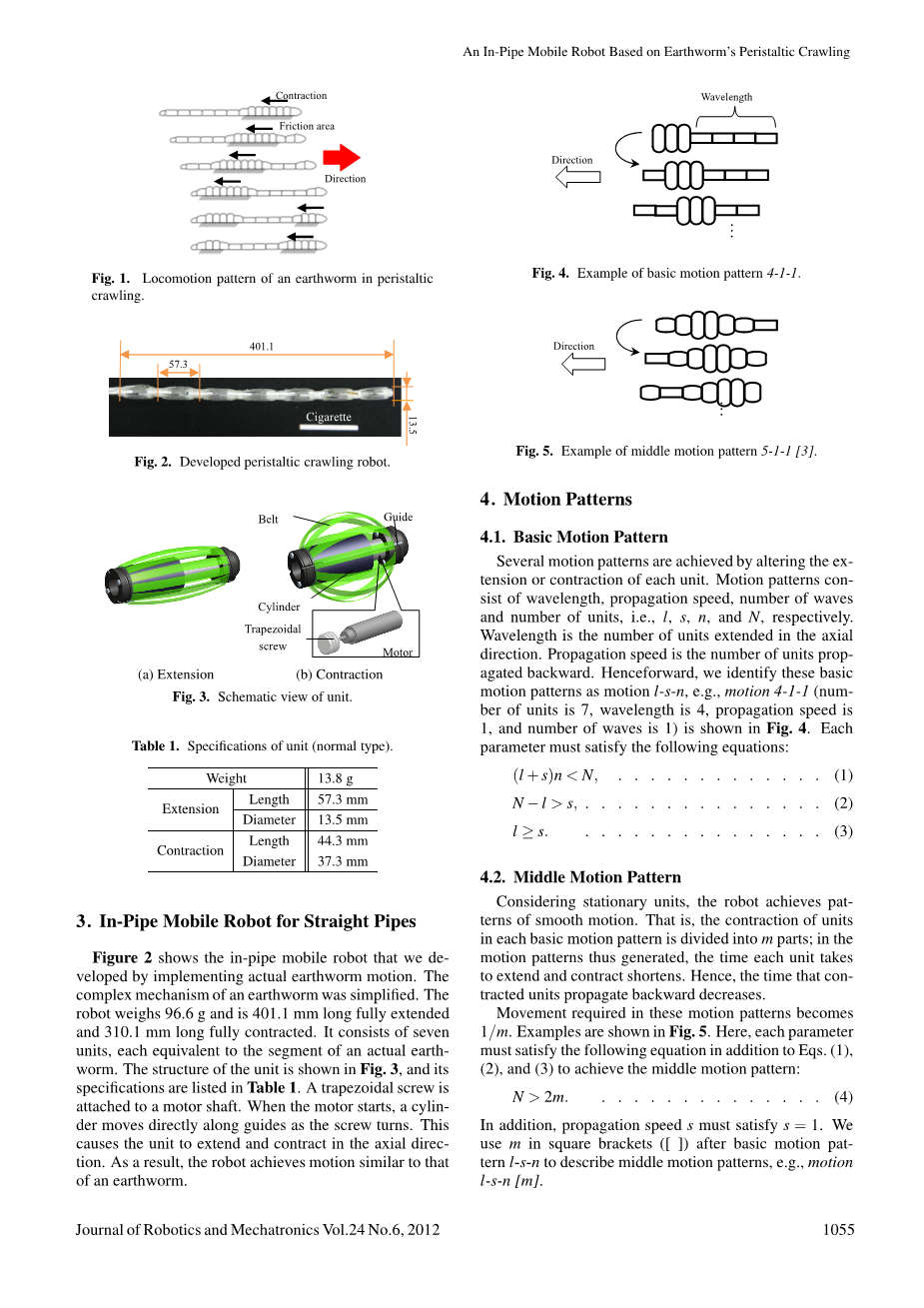
图2显示了我们通过实施实际的蚯蚓移动而开发的管道内移动机器人。 复杂的机制,无法实现。 该机器人重96.6克,长401.1毫米,完全收缩,长310.1毫米。 它由七个单位组成,每个单位相当于一个实际蚯蚓的一部分。 图3所示的结构及其表1所示的具体情况及与电机轴相连的梯形螺钉。 当电机启动时,随着螺杆旋转,气缸直接沿导轨移动。 这会导致设备在轴向方向上伸缩。 结果,这种机器人动作与蚯蚓相似。
4.运动模式
4.1 基本运动模式
几种运动模式可以减少每个单元的伸缩。 运动模式由波长,传播速度,波的数量和单元数量组成,即分别为l,s,n和N. 波长是沿轴向延伸的单位数。 传播速度是向后传播的单位数量。 因此,我们将这些基本运动模式确定为运动lsn,例如运动4-1-1(单元数为7,波长为4,传播速度为1,波数为1)如图4所示。 每个参数有以下等式:
4.2 中间运动模式
考虑到固定单元,机器人实现了平滑运动的模式。 也就是说,单位的收缩不同基础动作不同的部分;在这样产生的运动模式中,每个单位花费的时间来延长和合约。 因此,被收购单位向后传播的时间减少。 这些运动模式所需的运动变为1 / m。 例子如图5所示。 在这里,每个参数都必须满足式(1),(2)和(3)中的下式,以实现中间运动模式:
Ngt; 2m . . . . . . . . . . . . . . (4)
此外,传播速度s必须满足s = 1。在基本运动模式1-s-n之后的方括号([])中使用m来描述中间运动模式,例如运动l-s-n [m]。
5.理论模型
5.1 理论运动速度
首先,我们推导了基本运动模式的理论运动速度,其中几个被考虑。 在每个基本动作模式中,机器人进行的距离和从头到尾B和TB分别向前传播的时间。 我们将dB和TB表示为
这里,r是收缩量,t是每个单位从等式中得到的时间。 (5)和(6),我们将基本运动模式vB的理论运动速度表示为
接下来,我们分别推导出中间运动模式与机器人运动速度的理论运动速度,分别表示从机器人到机器人的距离向前传播的时间。 这些表达为
从等式(8)和(9)可以看出中间运动模式vM的理论运动速度为
使用电机的旋转速度omega;和梯形螺杆的螺距p,t表示为
将式(11)代入式(7)和(10),我们将vB和vM表示为
运动速度的理论值由方程 (12)和(13)如图6所示。注意,运动速度随着波长的增加而增大,传播速度为波数,并且最大运动速度为运动的值5-1-1 [3]。 另外,从方程式(12)和(13)可以看出,收缩量并不依赖于可调节的速度。 因此,即使管道内径发生变化,机器人也会以相同的运动速度继续前进。此外,单位可以粗略排列,因为单位之间的距离不取决于运动速度。此外,如果其中一个单位破裂,则可以通过考虑单位距离作为单位距离来计算机器人的速度。
5.2 理论推进力
因为机器人使用梯形螺钉移动。 所以,推力就是要达到单位的拉伸力。 我们设置梯形螺杆的推力来确定一个单位的拉伸力。
首先,我们计算一个方形螺钉的推力。 图7显示了材料如何应用于方形螺钉的斜面。 图8显示了基于蚯蚓的蠕动爬行的管内移动机器人的发展图
图7.P,Q,D和PS分别是水平力,推力,有效直径和螺距。
从图8中,tanalpha;表示为
如果考虑到摩擦,图8可以重新绘制,如图9所示。W是合力。 摩擦角是theta;。 从图中可以看出,正方形的推力Qs表示为
P使用转动螺钉的转矩tau;表示如下:
用方程 (16)代入方程 (15)中,我们表示方形螺钉Qs的推力为
在这里,我们考虑了梯形螺杆2beta;的前角,因为我们考虑了推力。 梯形螺钉的横截面图如图10所示。
从图中可以看出,梯形螺旋Qt的推力是一种基于蚯蚓蠕动爬行的管内移动机器人,表示为
因此定义单位的延伸力是因为它等于推力摩擦力。 表2显示了梯形螺杆的参数。 由于梯形螺钉用油脂润滑,因此theta;近似为0。 将每个参数代入方程 (18),可以计算。 这里,拉伸力为45.03N,最大扭矩为14.3mNm。 如果机器人的摩擦力大于此力,则推进力等于伸展力。 相反,如果摩擦力低于该力,则推进力等于机器人的摩擦力。
6.直管机器人的实验结果和讨论
6.1 运动速度
我们在每个运动模式中测试机器人和测量的运动速度。 这些实验使用直径为27毫米的丙烯酸管进行。 运动速度与运动模式之间的关系如图11所示。 运动中最大运动速度为5.24mm / s 5-1-1 [3]。 运动速度随着波长,传播速度或波浪数量的增加而增加。
然而,实验值从不低于理论值。这是解释如下:虽然理论omega;是由移动一个单位,真正的omega;是不同的。真正omega;,因为单位被迫降低了其前后的单位,和理论omega;值随负载降低这些类型的力。此外,这些理论与现实之间的误差积累,随着波的反向传播。这就是为什么运动速度的实验值小于理论值的原因。
6.2 摩擦力
用图12所示的实验装置测量了机器人的最大摩擦力。在这里,机器人与腈纶管道之间的摩擦系数为0.76。
有关单位的数量从1个到7个不等。最大摩擦力是由载荷传感器测量的。首先,机器人的单位在水平管道内收缩,切断电源以保持收缩。然后,我们将机器人连接到测压元件上,并沿着一条直线将压克力管道拉出。当丙烯酸管从机器人上滑出时,摩擦力是最大的静摩擦力。该力与收缩单元数的关系如图13所示。最大静摩擦力随收缩单元数的增加而增加。在这里,在每个运动模式NC的轴向中收缩的单位数是
因此,我们可以观察到每个运动模式对应的最大静摩擦力。
此外,我们测量了一个单位直径变化时的静摩擦力。图14显示了一个单元最大静摩擦力与最大膨胀直径之间的关系。最大静摩擦力随着最大直径增大而增大。
6.3 单位伸长力
在图15所示的实验装置中,用一个测力单元测量了单元的扩展力。一个单元的最大伸长力是44.24 n,这个实验结果与理论值差不多。在这里,正如前面提到的,我们假设推进力等于机器人的摩擦力,因为摩擦力比推进力低。
6.4。当机器人通过管道时,需要时间响应头单位推进力。机器人在每一运动中都通过肘部等形状进行测量。推进力模式采用如图16所示的实验装置中的载荷单元。推进力与运动模式的关系如图17所示。最大推进力是8.99 N在运动1-1-1。由于摩擦减少,推进力减少,收缩单位减少。当每个运动模式的推进力与收缩单位的数量相比较时,推进力比每个运动模式对应的静摩擦力要高。
6.5 头部时间响应
推进力图13和17显示,每个运动模式对应的推进力超过了该模式的最大静摩擦力。在这里,运动1-1-1展示了推进力与最大静摩擦力之间最大的差异,我们并以此为例讨论了其过度的原因。图18显示了推进力实验中头部单位长度在1-1-1运动中的时间响应。
使用运动分析软件对长度进行分析。图中显示,头部的响应通常为30 s左右。不久,头部单位与负载干涉,不能完全伸展;然而,它通常会收缩并重复这个动作。结果,头单位逐渐缩短。此外,从图14中,最大静摩擦力随头部单元的缩短而增大。这就是为什么每个运动模式的推动力超过最大静态摩擦力的原因。控制运动脉冲可以防止这种运动。
7、管子内移动机器人
机器人通过弯管有三个问题:
1、由于材料和连接的关系,关节是不会弯曲的。
2、这是一种太大而不能通过弯管的。
3、在直管和弯管之间,头部不能越过零件的干涉。
在这些问题的基础上,我们开发了一个可以通过弯管的机器人。
7.1管子内移动机器人
图19显示了我们开发的用于通过弯管的机器人。其规格列于表3。它由六个单元组成。每个关节都使用一根橡皮管,使其被动地弯曲。为了避免在关节弯曲时挤压关节,我们在橡皮管中设置弹簧。它的单位也被缩小,通过使用发动机的下一个尺寸通过肘管。我们将机器人的单位扩展率降低了27.1%。我们还发明了一种头,用来在直管和弯管之间通过障碍。它由一个橡胶管、一个弹簧和7毫米的微电机组成。电机轴上的橡胶部件在电机启动时旋转,所以它通过弯管。图20、21和22分别展示了它的新关节、头部和动作。从图中可以看出,橡胶部分沿着肘部的内壁向一个方向旋转。经证实,它是在下面的管道中被捕获的。
7.2 管道机器人驱动实验
我们测试了管道机器人的驱动实验,看它是否能顺利的通过弯管。本实验采用2个丙烯酸管和一个直径27 mm (25 A)内径的弯管进行实验,通过弯管的性能试验结果如图23所示。在这里,运动2-1被用作机器人的运动模式。这些数字表明机器人通过了弯管。相比之下,机器人很难通过其他运动模式穿过肘部。在实验中,其运动速度显著下降,因为缺乏驱动力将单位向前推进到肘部(前面的单位),并从它(后面的单位)拉回部件。
8 结论
我们已经开发了用于直和弯管的机器人,内径为27毫米。我们还推导出了机器人运动速度和推进力的理论公式,并对27毫米直径的腈纶管道进行了数个实验,以检测运动速度和推进力。由此,我们得到了如下结果:
1、我们研究了运动速度和运动模式之间的关系,发现在机器人的直线管道上运动速度为5.24 mm/s[3]。
2顿号我们研究了推进力和运动模式之间的关系,发现最大的推动力是在1-1-1运动中,使用机器人进行直管的最大推力为8.99 N。
3、肘管的机器人通过弯管。
未来,弯管机器人将会改进如下:通过使用不同的摩擦材料和在机器人内部传递电缆,我们会增加机器人的驱动力。
参考文献:
[1] A. Kuwada, K. Tsujino, K. Suzumori, and T. Kanda, “Intelligent Actuators Realizing Snake -like Robot for Pipe Inspection,” Proc. IEEE Int. Symposium on Micro-nano Mechatronics and Human Science, pp. 1-6, 2006.
[2] M. Konyo, K. Hatazaki, K. Isaki, and S. Tadokoro, “Development of an Active Scopecamera Driven by Ciliary Vibration Mechanism,” Proc. of the 12th Robotics-symposia, pp. 460-465, 2007.
[3] P. Li, S. Ma, B. Li, and Y. Wang, “Development of an Adaptive Mobile Robot for In-pipe Insp
全文共6947字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11328],资料为PDF文档或Word文档,PDF文档可免费转换为Word

