
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
可变单履带车辆系统的机械设计研究
Jeehong Kim a, , Changgoo Lee b, Gunho Kim c
a韩国全州崇博国立大学控制与测量工程系
b韩国济州岛崇博国立大学电子工程系
c大韩民国昆山国立大学电力系统工程系
摘要
文章历史:
2009年4月8日收到
2010年3月1日至2010年3月19日修订
2010年4月18日可在线查阅
关键词:
VGTV 履带车辆 可变形状 非理性方程 长度 超越楼梯
引言
本文介绍了一种履带式车辆的履带轮系统,该系统采用非对称变形状单轨结构。由于轨道长度是可变的,在以往的研究中还未对非对称履带轮结构有过研究。开发这种非对称单履带车轮系统需要分析设计单元,特别是基于车架长度和旋转以及运动张力单元的可变结构单元。户外移动机器人车轮系统的设计目标是开发一种能够处理崎岖地形的驱动机构。利用多种形状提供了更强的能力来克服类似楼梯这样的障碍.。本文分析了建立变轨道形状所需的设计参数,确定了轨道系统的规格。
- 介绍
对于机器人完成崎岖环境下的越野任务,需要开发合适的移动平台,该平台需要具有在多种地形、多种障碍和狭窄的空间中爬行的能力。现有的移动平台有小型机器人、变形机器人和柔性机器人.。这些机器人机构是当前城市搜救机器人的发展热点。
开发高效的救援机器人的重要目标是使其实现翻越陡峭地形、提高救援机器人各项功能。地形适应能力在很大程度上取决于轨道的配置。履带车辆若要实现自动适应地形变化,那么各种车辆的配置都必须将轨道形状的变化与地形变化相匹配。
首先,Kohler提出的Vctv-1(可变结构履带飞行器-1)和Maeda提出的vctv-2(vctv-2)被设计时尽可能适应陡峭地形,并通过转换四条轨道来使转动阻力最小化。Iwamoto的vctv-3是第一种具有行星轮的单履带机构,具有良好的楼梯适应性。此外,马滕斯的成果有一个与vctv-1类似的机制,并且使用闲置机构控制轨道张力。Xeally公司利用Yoneda开发的粉末包制作轨道来提高轨道的摩擦系数。Pandora则使用双攻角双轨机构。二十一世纪以来,人们对救援机器人的功能和驱动机制进行进一步研究,有代表性的例子有微型VGTV(Inuktun Corp.)和Packbot(iRoboCorp.)。对称单履带机构由于其轨道系统具有较强的越障能力,因此如何保持轨道长度是众多研究工作的重点。但是单履带机构系统结构复杂,需要设备来实现不同情况下的同步运动,并且没有装置来进行改变状态和控制。最重要的是,由于对称变化,很难得到一个合适的攻角来越障。这些都是这种系统出现的缺点。最重要的是,确定履带轨道长度是通过转换轨道形状来改变的。因此,许多履带移动系统的设计被分为两个部分:转换和移动。在许多情况下,履带轮系统的可变轨道设计成分离类型或双履带系统。但他们必须控制两条轨道,以稳定驾驶,这就是他们为什么需要安装更多的设备。在某些情况下,特殊的分离类型具有先进的结构以实现各种运动,如手臂连杆。但这些不是轨道形状转换系统。
本文提出了一种非对称单履带车轮系统,介绍了它的结构和保持可变换轨道系统长度与减小长度间隙的方法。因此,我们提出了一种有效的变换结构,并解释了运动学规律。然后考虑轨道长度随转角的变化,并根据臂架轮距比这一变换机构研究了不同的结构形式。
- 机构设计概念
可变形单履带车轮系统设计成可适应轨道形状,可以驾驶在平坦的道路,也可以跨越障碍,如楼梯。在楼梯上升后,改变移动系统的轨道形状,增加直线轨道的摩擦力。一些移动机器人车轮系统有可变的行星轮爬行器,以确保石本太郎和山本弘所提到的优势类型。这是一种具有移动行星轮的结构,它具有控制角度以改变履带形状的能力,具有复杂和能量密集型的特点。
车轮系统的臂架,在框架两端都有从动轮,可以改变轨道形状,对克服障碍物很有用。
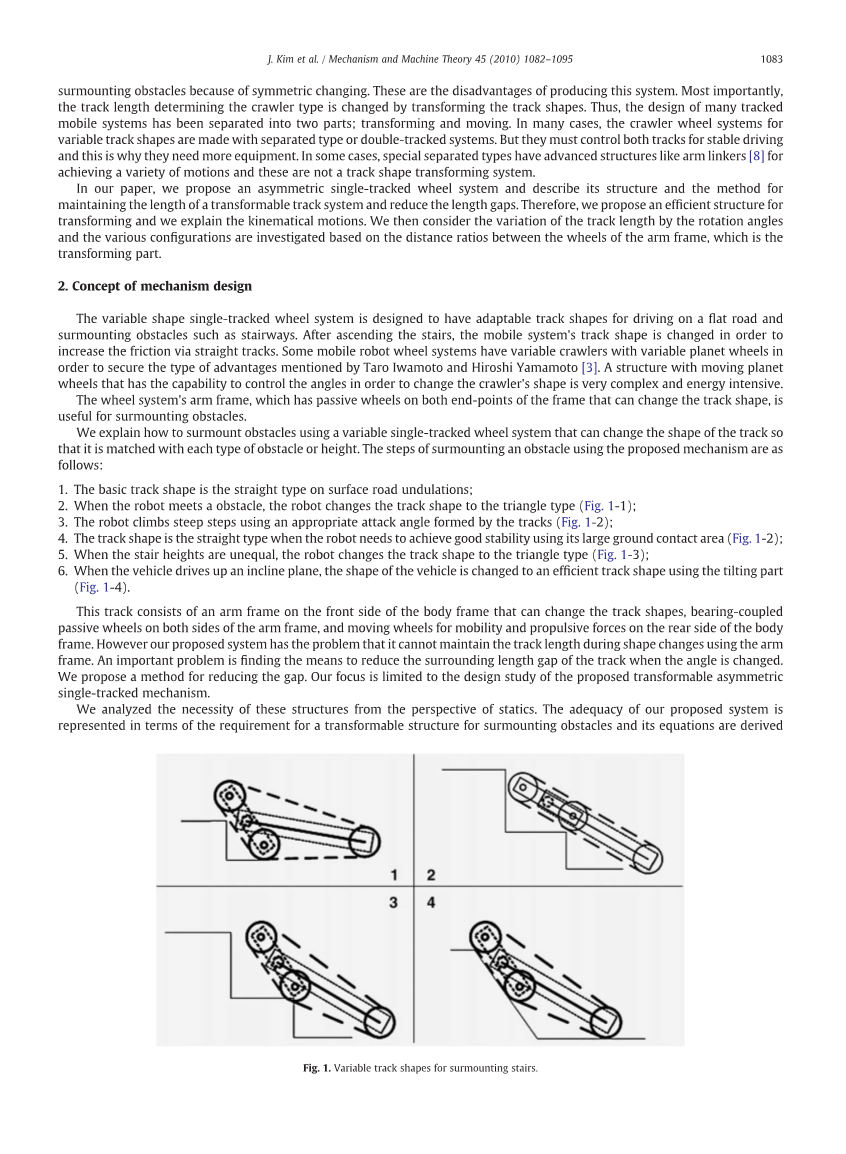
我们解释了如何通过一个可变的单履带车轮系统来克服障碍,该系统可以改变轨道的形状,使其与每一种障碍的高度相匹配。使用拟议机制克服障碍的步骤如下:
1.路面起伏的基本轨迹形状为直线型;
2.当机器人遇到障碍物时,机器人将轨道形状改为三角形(图)1-1);
3.机器人爬上陡峭的台阶,使用适当的迎角形成的轨道(图)(1-2);
4.当机器人需要使用其大的地面接触面积来获得良好的稳定性时,轨道形状是直线型的(图)(1-2);
5.当楼梯高度不等时,机器人将轨道形状改为三角形(图)(1-3);
6.当车辆驱动倾斜面时,使用倾斜部分将车辆的形状改变为有效的轨道形状(图1)1-4)。
图1。超越楼梯的可变轨道形状
该轨道由机身前侧的臂架、臂架两侧的轴承耦合从动轮、机身后侧的移动轮和机身后侧的推进机构组成,可改变轨道形状。然而,系统存在的问题是,在使用臂架改变形状时,无法保持轨道长度。重点在于如何在改变角度的情况下减小轨道周围的长度间隙。我们提出了一种缩小差距的方法。重点是对所提出的可转换非对称单履带机构的设计研究。
我们从静力学的角度分析了这些结构的可行性。本文提出的系统的充分性是以可转换结构的越障要求来表示的,其方程是根据机体框架对障碍物壁的弯矩力推导出来的。正如我们所提到的,车辆的动力是摩擦(F)和牵引力(N)的合力,它们被分解为水平和垂直分量。最后的力是力矩(M)的力。这些力基本上是由车架上后轮的推进力产生的。N的位置是长侧轮和楼梯壁上轨道表面的接触点。可旋转臂架的旋转角度决定了地面与机器人身体之间的夹角。(请参阅图。2)
我们把路过一个障碍物时的切向摩擦力导出,从方程出发计算力矩。这个公式必须改写为机构的每个位置。我们先前获得的所有车轮位置在笛卡儿坐标系中由Eqs。(1)——(3)组成。distk()是平行于K轴的距离值,例如distx(锥)是锥子在X轴上的投影,并有一个旋转中心点和锥子来计算此时力的大小,Ca提供的代表在后轮的轴有一个原点坐标上车轮位置的方法。(XC是重力的中心,r是车轮的半径,W是系统的重量)
从上述方程出发,我们可以考虑攀爬障碍物的力矩的特征。采用我们的单履带车轮系统的车辆,在长侧轮Y值较大、车辆重量小的情况下,具有较好的倾摆能力。因此,长侧轮在障碍物壁接触臂架上的位置对弯矩力的推导具有重要意义,是本文提出的可转换结构要求。
为了实现结构的稳定性,我们需要对轨道的长度和结构进行分析,并且必须用方程来找出一些长度和角度参数之间的关系特征。利用数值方法和Matlab程序可以找到一些规律性的特征。
- 运动学设计
3.1 可转换轨道的运动
轨道的结构由可旋转框架臂上的车轮位置控制。我们用笛卡尔坐标来表示研究中的变结构。这使得我们能够分析变臂的运动学规律,并将连接关节关系的简单方程用平移和旋转矩阵表示,如图2所示
这种结构只有一个自由度,即可变臂与车身前侧的连接得唯一独立的旋转关节。
在图2中,theta;是臂架与平台体之间的旋转角。请注意,手臂上主动旋转中心的坐标通过旋转改变,臂架的车轮可以降低,以便与地面接触。用三角函数计算了确定平台体与变形形状底部轨迹之间的自变量角theta;的其他角变量alpha;(或beta;,如果选择正角)。轨道的结构由两个三角形组成,它们共享一个与履带轮系统相对应的边。
通过用上面的方程表示这些条件,其中phi;是倾斜角,我们有:
- 直角坐标系统结构。(CCW角theta;)
若theta;小于零,即臂向CW方向转动时,转臂后的下侧轮坐标用上述方程表示。在平坦的情况下,我们可以考虑沿y轴的点来匹配原点。
臂上侧轮的坐标由以下方法给出:
轨道形状由旋转角theta;和沿Ar的距离(L和S)控制。
3.2轨道长度
我们建议机构由一个单一的履带带组成。因此,我们必须考虑周围轨道的可变长度,尽管皮带长度是固定的。但是形状是通过改变手臂和身体的控制角theta;和沿着手臂的距离进行改变。由此导出了臂体夹角与长度的关系方程。周围的轨道总长度的车身长度,确定B,在手臂上L的长边,在手臂上短边长度,角度,theta;,与圆的周长(图3)。
这里, 2pi;R是与车轮相关的圆弧的所有曲线的长度之和,因此总周长是由臂长、圆周长和三角形边的两个平方根之和得出的。根据方程的条件,可以确定theta;各角的总长度。我们也可以计算最小和最大轨道长度之间的差距,并选择最小值。特别是,最大航迹长度的角度是最大角度(theta;max)
3.3.最大轨道长度theta;最大值
在获得与最大轨道长度对应的距离和角度之前,必须先确定f(X)是减函数还是增函数。函数f(X)可以用常数和非理性函数g(X)表示为两部分,即:F(X)=L S 2pi;R g(X)。如果函数g(X)是凸的,则f(X)在此范围内具有最大值。(0le;x=costheta;le;1)。
在边界上:
图3.计算x,求出最大长度和轨道长度
如果它是凸函数,则函数f(X)在下列条件下具有最大值:
那就是,当角度为x时,f(x)= Y微分函数表示为dy/dx,因为X值的结果在yacute;等于零时F(x)有最大长度,
为简化的表达式,方程的简化为和
如果Xmax在(0,1)范围内,则f(x)是凸函数,f(x)在此范围内有最大值。但如果Xmax(=costheta;max)超过1时,则f(x)是一个递增函数。函数f(x)的这个特征是由Xmax对S的不同距离确定的。
根据Eq的说法。(8)在固定条件下,将距离S从50变到150,计算出表示f(x)最大值时的x,其中B和L分别为520和150。例如,在相同的条件下,当x=0.76和S=105时,轨道长度最大。函数f(x)的特征一般是在边界范围(0,1)上的凸函数。但当S<94时,f(x)是一个递增函数。
3.4轨道长度和距离Sn
正如我们所提到的,轨道形状是由可旋转的臂架进行转换,在两个端点上有两个从动轮,适当选择旋转点到两个端点的距离,以减小轨道长度之间的差距。臂的旋转中心连接到可以旋转的执行器上。总长度取决于上行轨道长度(M)和下行长度(M)。通过调整臂的旋转角度(costheta;=x),可以改变轨道的总长度。Sn和S是相似的,但是S是一个固定值,而Sn是一个变值。下标n表示一个变体值。
基于等式。(4)轨道总长度随theta;角从0°增加到90°而变化。不同轨道形状的长度间隙是由EQ导出的。(2)-(4)。最大轨道长度对应的角度由方程求出。(8)。通过方程的边界条件,选择了g(0)或g(1)的最小轨道长度。(5)。从方程中替换S。(9)在Eq中。(5)可将后者改写如下:
表1
关于Eq给出的Sn,B和L的xmax.(12)
图4在上八幅图中,当x为Xmax,n,0和1时,跟踪长度fn(X)则为Sn。图上的右轴和较低的位置线显示了Fmax与fmin之间相对于Sn的间隙。下两幅图显示了不同条件下Xmax和Sn之间的关系。
Gn(0)和Gn(1)交点处的最小gn变化,Xmax随Sn的变化而变化。FN(1)的值无论与Sn的关系如何都是常数,而FN(0)是随Sn的增加而增加的函数。但是,xmax随Sn的增加而减小(表1)。
导出Sn的轨道长度间隙。最小航迹长度由方程11导出。图4显示结果。对于Sn,最大和最小磁道长度之间的间隙最小,Xmax约为0.5。我们提到,最小轨道长度是FN(1)或FN(0)基于EQ。(10)和(11)以及边界条件fn(0)是当xmax增大时的减函数。也就是说,在FN(0)和FN(1)的交点处,间隙被最小化。
当Sn的x最大值约为0.5时,轨道长度间隙被最小化。
3.5最小轨道长度间隙的计算
延长的长度反映张力或多余的皮带的空间,由于旋转臂角的形状和框架条件,轨道长度的皮带有时可能比轨道的周围长度更长或更短,因此,我们的目标是减少扩展长度以保持最小长度。同时,我们还导出了从车轮(两端)到臂架旋转点的任意距离的最小长度间隙对应的角度方程。
如果要跨越的障碍物的高度增加,Ln的距离和计算的最小长度间隙也会增加。使用方程(11)和(12)计算了各种参数的取值,以求出保证最大-最小轨道长度之间保证最小间隙的条件的一般特征,即改变形状的角度。
图中的第一个情节。图5给出了在固定Ln距离为150的情况下,每条轨道的最大长度与车架长度(Bn)与角度(xmax=cos-1theta;max)之间的关系。根据图5所示,当身体的长度增加到650以上时。确保最小间隙的角度是59.33°左右的周期值
图5.。对短边距(Sn)和theta;最大值的数值计算,确保在固定的Ln距离为150的情况下,不同车架长度(Bn)的间隙最小。
图中第二和第三情节。图5结果表明,随着车架长度的增加,最大和最小轨长之间的间隙急剧减小,短边距(Sn)增大,达到800。在机身长度1600以上,短边(Sn)和间隙的距离分别收敛于140和3。也就是说,车身的长度较长,最大-分钟的间隙较小,最小间隙的
全文共6137字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11307],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

