
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
麦克纳姆轮的几何学与运动学
A.Gfrerrer
摘要
Mecanum轮用在全方位移动的小车上。这就意味着这种小车能够按规定路线移动并且可绕中心做任意旋转。一个Mecanum轮子是由一组绕着轮子轴排列的辊子组成的。在这篇文章中我们详细描述了这些辊子的几何形状。我们推导出了滚动曲线和滚动面的简单正态参数。这些参数表示揭示了辊子的几何形状。借助它们的帮助我们很容易就能得到一个用于制造目的的辊子近似表面。基于辊子的参数化我们来研究以Mecanum轮为基础的小车的运动学。
关键词:Mecanum轮 正运动学 逆运动学
- 背景
麦克纳姆轮(图1左)在1973年被瑞典工程师Bengt Ilon发明出来。它由一组绕轮子轴线规则排列的k个辊子组成。每个辊子的轮廓面R以b为轴线,b轴绕a轴外环斜置。通常轴a和轴b之间的夹角delta;角度选择为plusmn;45°。图1(右)展示的是一个有三个轮子的移动机械人。每个轮子都是由一个单独的电机驱动,它们给车辆提供在平面上进行全方位运动所需的三个自由度。这种架构的优点是这些轮子不需要转向装置而实现全方位移动。辊子绕他们的轴被动的旋转。
Dickerson和Lapin在1991年得到的滚动生成的参数化曲线是相当复杂的,并且没有揭露辊子的几何特征。通过画法几何的帮助,我们得到了一条非常自然的参数化曲线,这种曲线还产生了滚动面和经线的简单参数表示(第2节)。在第3节中,我们使用这些参数通过一个近似的圆环面来代替辊子。此外,我们推导出了一个表示麦克纳姆车轮的运动系统的精确速度方程(第4节)。为了更准确地说明,接触点C和地形的位置也被考虑在内。在关于麦克纳姆车轮运动学的文献中,(作为简化)总是假设点C在任意时刻位于车轮中心的下面。通过这个简化我们最终研究出了一个由三个麦克纳姆车轮组成的小车(第4.1节),并且对这种机械正运动学的可解性给出一个很好的几何特征描述。
- Mecanum轮辊子的几何分析
麦克纳姆轮的辊子的轴建立一组k等距的属于绕a轴旋转的单叶双曲线形成的面上的发生器。如果轮子在平面pi;上移动,它的轴a保持与平面pi;平行,并且每个时刻至少保证一个辊子接触地面。据此,一个被动的(无驱动力的)绕
图1.左:Mecanum轮.右:带有三个Mecanum轮的小车
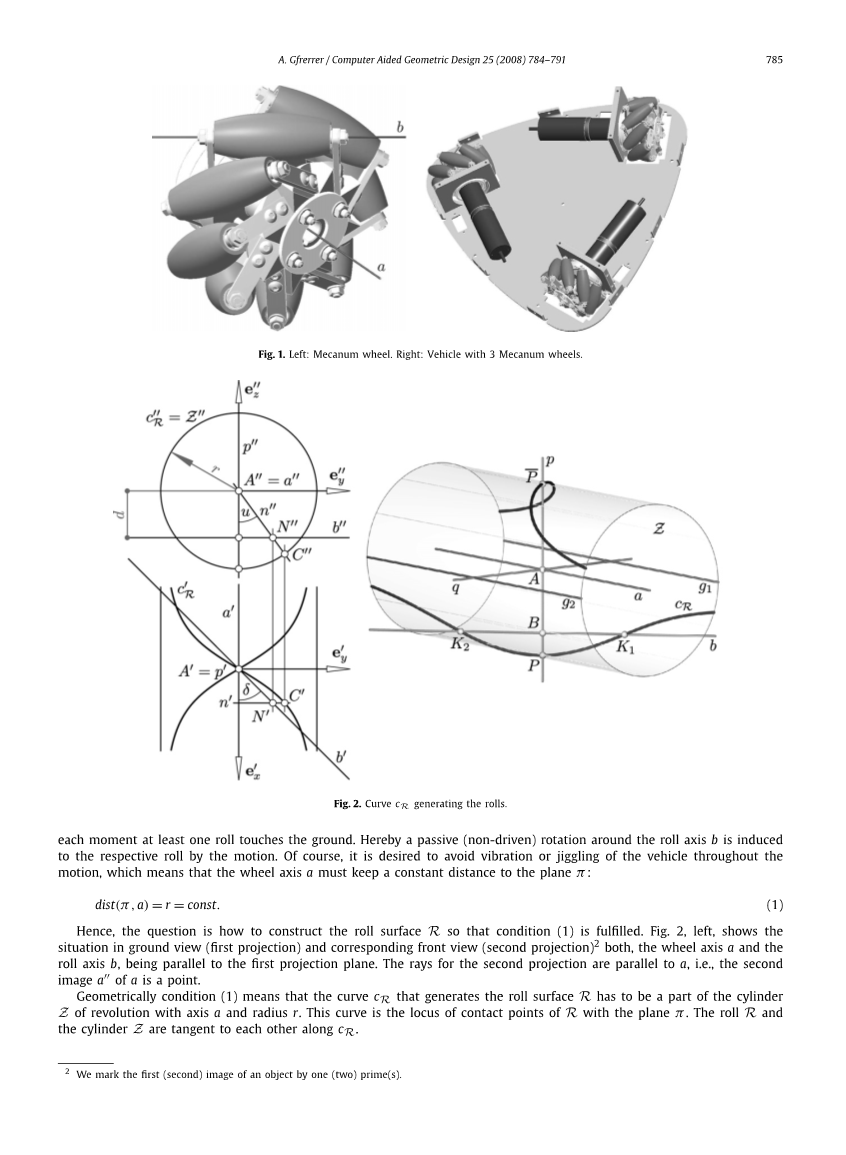
图2.生成辊子的曲线
轴b的辊子的旋转是由各自的轴的电机引起的。当然,我们希望在整个运动过程中避免振动或晃动,这意味着车轮轴a必须保持与平面pi;的恒定距离:
dist(pi;,a)=r=const (1)
因此,问题是如何构建滚动面,使条件(1)得到满足。图2,左,显示地面视图(第一个投影)和相应的前视图(第二个投影),这个轮子的轴a和这个辊子的轴b,平行于第一个投影面。第二个投影的光线平行于a,也就是a的第二个投影aʺ是一个点。
几何条件(1)指生成滚子表面R的曲线必须在绕a轴半径为r的麦克纳姆轮圆柱表面Z上。为辊子表面R与地面接触点C的运动轨迹,即辊子表面R与车轮圆柱表面Z相切的点在上。
如果Cʺisin;是Cisin;的第二个投影,我们很容易构造它的第一个投影点C′:
- 让n表示R在C上的表面法线。由于圆是R的第二个轮廓delta;,n是包含Cʺ的的直径。
- 因为n是在轮廓线上的曲面法线,第二个投影平行于这个投影的平面所以它的第一个投影n′是一条水平线。
- 因为R是n旋转形成的表面必须与b相交于点N。用这种方法,n的第一个投影点n′和C点的第一个投影点C′是固定的。
上述的解释可以得到一个的简单参数方程。用p表示a和b的公垂线,并且让A点为p和a的交点,也就是轮子的中心。我们用d和delta;表示a和b之间的距离和角度,并且介绍一个坐标系系统S:={A;,,},系统的第一个和第三个单位向量和分别在a和p上。我们用p和n之间的夹角u作为参数。通过图2我们可以得到:
(2)
作为的参数方程。由于轴a和轴b斜交,cotdelta;ne;infin;是可以保证的。
公式(2)告诉我们通常来说是一个有理四阶空间曲线。比如说,通过tau;=tan重新参数化。
只有如果bperp;a(delta;=plusmn;) ,是一个半径为r的普通圆。在文献里我们通常把这样的圆称作“瑞典轮”。
图2右,形象地给出了一个包含两条曲线的曲线的轨迹。有圆柱体Zeta;的轴a和作为对称轴的a和b的公垂线p。因此,a和p的公垂线q也是的一个对称轴。曲线和p相交于点P(0,0,-r),(0,0,r),并且如果delta;ne;,能够产生圆柱体Zeta;发生线=0,y=plusmn;r作为渐近线。轴b和曲线交于轴b和圆柱体Z的公共点(plusmn;,plusmn;,-d)。
由于在delta;ne;的情况下曲线包含两个部分,对于辊面R是一样的。图3显示了由的分支生成的R的一部分贯穿点P。辊子R是绕轴b的一个旋转表面,以及一个通过p和b正交的对称面sigma;。b和p的公共点B是R的对称中心。这个穿过点P和以B为中心的圆⸦sigma;是R的一个赤道面,这意味着滚子轮廓面R上的最大径向截面圆半径为(r-d)。图中的是轮廓面R的两端点。
备注.用于上面的构建中的曲面法线n交于线a,b和在无穷大的yz平面里的直线。因此,如果delta;ne;,他们设立一个建立在双曲线的抛物面P的一个生成面。可以很容易的得到P的方程:
笛卡尔坐标系的y轴是P的轴,并且A是它的顶点。建立在P上的第二个生成面包括平行于xy平面的直线。因此,P与平面在两条于xy和yz平面的无穷处的直线上相交。曲线是P和圆柱体Z的相交曲线。据此,我们可以再次看到(以一种纯几何的方式),是一条带有上面描述的渐进线的有理四阶曲线。由于这个点是圆柱体R的顶点,并且同时位于抛物面P,所以的唯一点是X轴无穷远的点。在上的P的切面tau;是xy平面,它交于位于的两个切面的圆柱体于它的唯一点。
作为由一个旋转曲面生成的旋转曲面,R本身也是有理的。如果delta;ne;plusmn;,R的代数式阶数是8次,也就是它是它的生成曲线阶次的两倍。在特殊情况delta;=plusmn;的时候,辊子面R是一个环面,环面的顶点圆交它的轴b于两点。
当然,对于麦克纳姆轮的物理辊子,只有R在两点之间的某一部分被选取。
为了获得滚动面R的合适表达方式,我们采用一个新的以B为原点的坐标系={B;,,,x轴=b,并且新的z轴与之前图3中的z轴一致。据此,这个系统的曲线的表达式为
(3)
图3.辊子表面R.
通过绕轴旋转角nu;,我们发现
(4)
作为R的参数表达式
令=0,我们得到tan=-cosdelta;tanu,代入公式(4)的第三行,与第一行一起,位于平面的辊子圆环面的顶点曲线的参数化(参数为u):
(5)
更精确地:式(5)是这两条顶点曲线中其中一条的参数化;另一条曲线是与第一条对称的一条曲线,它绕轴b=旋转,可以通过改变平方根前面的符号来获得它的参数化。
- 通过圆环面辊子的近似处理
如我们在之前的章节看到的,麦克纳姆轮的辊子表面R是由四阶曲线生成的8阶代数形式。辊子表面的自然参数化,以及它的顶点曲线(公式5)能够被用于实际加工生产过程中,这样可以使辊子的加工精度更高。但是,通常来说由于辊子有一个橡胶外套,用一个近似R的简化曲线就足够满足精度了。比如,用圆锥曲线或者有理的自由曲线。作为例子,我们将为辊子R构造一个近似的曲面T。
问题1.构建一个带轴b的曲面T,因此,曲面T和辊子表面R沿着赤道圆有二阶接触。
由于关于所在平面sigma;的对称性,所求曲面T的中心点必定是点B。图四的左边展示了在平面里的情况:在这个平面里辊子R的两个环截面中的一个必须和辊子圆环面的顶点曲线在P点接触(见公式(5))。让我们用表示这个环截面。反之亦然,如果和在P有k次接触,而在沿着所生成的表面R和T是同样的。
环截面的方程可以被这样表示:
(6)
这里和就是表示中心圆l和环面顶点圆的曲线的半径。
通过将公式(5)代入公式(6),我们可以得到这个方程:
(7)
图4.两种构建一个近似圆环面的方法.
在u中,因为两条曲线和都是对称的,所以是一个偶函数。因此,所有奇阶导数都在u=0处为0:
这对于的任意值都是成立的。
现在我们确定了和的值,以此得到两个附加条件:
如果条件满足。结果就是:
(8)
(9)
对于rl和rm的这些值,所有f的三阶导数在u=0处都等于0.因此,麦克纳姆轮的辊子圆环面的顶点曲线和环面顶点曲线在点P处有3维的接触。同样的道理也适用于沿着它们的公共赤道圈旋转所生成的表面:
定理1.麦克纳姆轮的辊子的表面R,和同轴的带着中心圆l⸦sigma;(中心点B,半径)的圆环面T,以及半径为的顶点圆沿着它们的公共赤道圈在三维空间有接触。
恰好在轮子是瑞典轮(delta;=plusmn;)的情况下,圆环面T和辊子表面R是完全一样的。尤其是如果满足delta;=plusmn;(这种情况主要出现在实际应用中),圆环面的半径是:
.
定理1是说,接近它们的公共赤道圈,圆环面T可以很好地近似等价于辊子表面R。图4左,展示了辊子顶点曲线和环面顶点圆两条曲线。另一方面,这个图形也揭示出,在P的某一距离上,近似处理是不满足的。因此,如果一个麦克纳姆轮的辊子有更长的长度,用一个圆环面作为近似处理会更有用,这种近似处理的顶点圆与顶点曲线相切于点P,并且此外的另一个点Q也包含在其中(见图4右)。通过公式(5)的帮助点Q的位置可以被计算出来。沿着的近似圆环面仅仅是,但是在这之外的范围能够有一个更好的近似处理。
- 麦克纳姆轮的运动学
我们认为一辆在平地上移动,并且带有麦克纳姆轮的小车就像图1右边这样的。让我们分析一下在t时刻的一种情况(图5)。这其中有四个系统包含在其中:地面,小车,轮系,辊子,在这一刻与地面接触于某一点C(接触点)。注意,这个点位于轮系的轴a的下方:它是在地面里轮子轴a和辊子轴b的正交投影的交叉点。只有在轴b处于水平位置的情况下,C点位于轮子中心点A的下方!
通过分析描述,我们选择一个在小车上的任意一个点作为坐标系S1={;;;}的原点,与小车联系在一起,x轴和y轴平行于地面。轮子中心A能有x轴和y轴坐标和于坐标系S1中。alpha;可以表示轴和轮子的轴a之间的夹角。我们可以得到:
图5.一辆带有Mecanum轮的小车的速度图
是a的方向向量。辊子的方向向量b取决于轮子的旋转角度u,如下式:
(10)
在坐标系S1中,接触点C有x-和y-坐标,如下:
(11)
令w为/(小车/地面)之间运动的角速度,并且是O1在t时刻运动时的速度矢量。然后,接触点C(,)的速度向量在运动系/中是如下表达:
(12)
运动系/(轮子/小车)是绕轴a的简单旋转运动,因此,这个运动系中C点速度向量是:
(13)
式中是运动系/的角速度。
运动系/(辊子/车轮)是绕b轴的旋转运动。因此,C点的瞬时的速度向量垂直于b(公式10):
(14)
C点在运动系/(辊子/地面)中的速度向量必须为0,因为要避免辊子和地面之间发生相对滑动。利用复合运动的加法原则,我们得到了如下条件:
用这个式子带入(12),(13),(14)可以得到
通过消除我们可以得到一个不一样的方程:
(15)
以此来定义小车运动和车轮转动之间的联系。在这个方程中的参数,,,是关于u的方程,根据公式(10),(11)和u,当然,这也取决于时间t。
如果我们研究全面地运动,这种情况会尤其复杂。当轮子的其中一个辊子与地面的接触点C从轮子的这一边移动到另外一边。当旋转到下一个辊子的时候,C点又会再次跳回第一条边。它遵从,,,是带有跳跃不连续点的函数,这与辊子的变换有关系。
这就是在实践中假设平均的接触点C位于轮子中心A的正下方的原因。通过这种简化,我们可以将式子,,,带入公式(15)。然后我们可以得到:
(16)
这个公式可以用于近似计算给定了小车速度数据,,的麦克纳姆轮的速度。
4.1.例子:带有三个麦克纳姆轮的小车的运动学
例如,我们研究带有三个麦克纳姆轮的小车,轮子的中心点为(,)和轮子的轴的夹角,i=1,2,3。如果我们根据公式(
全文共9034字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11298],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

