英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
摘 要
本文提出了以可编程控制器(PLC)为基础采用并联电容器的开关的方法来进行三相异步电动机功率因数的校正。三相异步电动机在空载时有一个低功率因数(pf),尽管电动机通以较大的磁化电流,但实际上传到电机的有效功率是很低的,这是为了克服电机的空载损耗。基于PLC的电机功率因数改善算法的开发和实施是通过一个三相异步感应实验室样机与一直流发电机相连,在空载和带有负载的情况下对算法的有效性进行测试。以功率因数的瞬时测量值为基础,PLC可根据负载条件将相应的电容器组切换到电路中,以此来改善电机的功率因数。PLC以其适应性强、实现简单、经济合理的优点在工业自动化中大规模的运用,可作为开关控制器使用。通过设计在不同负载条件下可观测到功率因数有明显的改善。
关键词:三相感应电动机;功率因数;功率因数校正;可编程逻辑控制器
1 绪论
感应电动机因其可靠性、成本低、鲁棒性和易维护性在工业中有最为广泛的应用,如电梯、起重机、车床、钻床、鼓风机、风扇、泵等等。然而感应电动机通过无功功率从电源系统中建立工作气隙磁通,这总是引起电机在滞后的功率因数下运行。因此,当具有多个感应电动机所组成的组织工作时将造成巨大的无功功率在多台电动机形成的网络中转移。这会导致网络损耗的增加以及电压电平的降低,使组织可靠性差,引起安全问题和更高的能量成本。系统的功率因数越低,系统运行的经济性越低。因此从节能的角度来说改善系统负载的功率因数是很有必要的。
本次设计的方案是基于PLC的控制算法来切换适当的静态并联电容器来改善配电网络的功率因数。PLC近年来的发展,在工业控制应用中的适应力,易于获得及较低的成本使它可用作功率因数控制器(PFC)。通过考虑感应电动机的每相等效电路并使用滑移的边界值来解决功率因数允许的电路,并以此来决定用于改善不同负载条件下的功率因数所需要的电容器值得范围。除了绪论和总结之外,本文还分了五个部分,其中包括通过电容开关切换改进功率因数、作为功率因数控制器的PLC、系统硬件架构以及改善功率因数的电容器值,最后是成果及讨论。
2 通过电容器开关改善功率因数
感应电动机从电源所得到的总电流是磁化电流和转矩所产生分量的矢量和。其中磁化电流是用以产生所需的磁通来克服存在于感应电动机定子和转子之间的气隙阻力。它对电机的实际功率没有影响,只是供电和配电体系中所消耗的部分功率。电机的实际电流只取决于感应电动机上的负载大小。
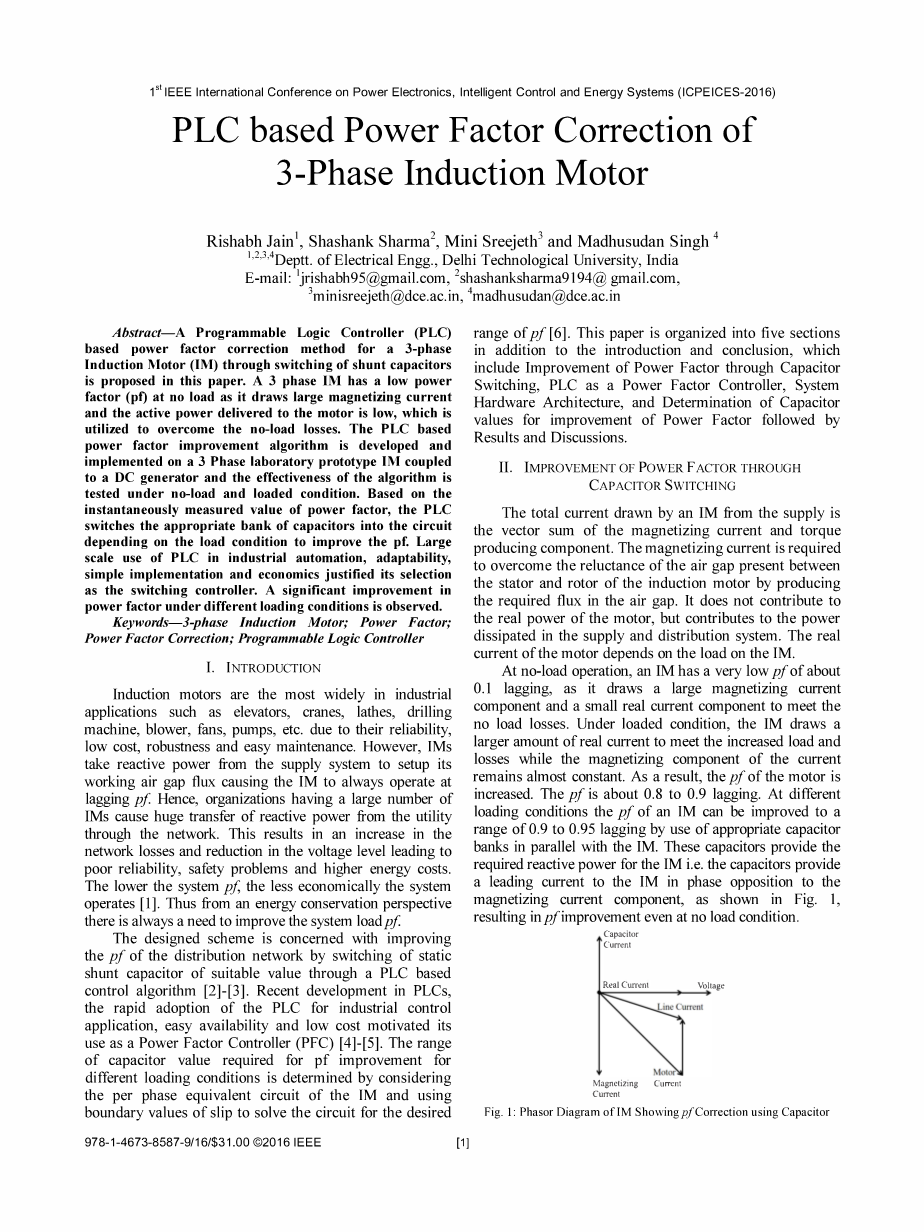
空载运行时,电动机具有大约0.1的低滞后功率因数,因为它从电源系统中获取很大的磁化电流分量,但实际电流很小,这样就满足了电机的空载损耗。在有负载的情况下运行,感应电动机将需获得更大的实际电流来满足增加的负载和损耗,但电流的磁化分量基本不变。这样电动机的功率因数将变大,大约能到0.8-0.9。因此在不同负载的条件下,通过使用合适的电容器组与感应电动机并联,可将功率因数提高至0.9-0.95.这些电容器可以为电机提供所需的无功功率,即提供与磁化电流分量相反的超前电流,如图1所示,从而实现在空载状态下进行功率因数的改善。
图1 感应电动机电容器组的gon功率因数校正向量图
进行功率因数校正的电容器减少了从配电系统中汲取的总电流,并通过提高功率因数来增大系统容量。在负载端提供所需要的无功功率,用户无需电力公司额外提供,这将使得由电力公司供应的功率总量降低,这样可达到节约能源及降低能量成本的目的。
3 PLC用作功率因数控制器
PLC是一种工业计算机,其通过连续监控输入设备的状态并按照预定程序做出决策来控制输出设备的状态,以此来控制整个系统。任何PLC运行的基本重复步骤首先是扫描输入,在此期间会扫描所有与PLC相连的输入状态,如图2所示。接着是程序扫描,此时PLC以由上而下的顺序方式扫描和执行用户定义的程序并产生输出状态。而在输出扫描期间,生成的输出状态在输出状态寄存器中更新,已激活或切断连接到PLC输出模块的输出设备。内部模块包括与编程终端通信、内部诊断等。
图2 PLC的扫描循环图
4 系统硬件构架
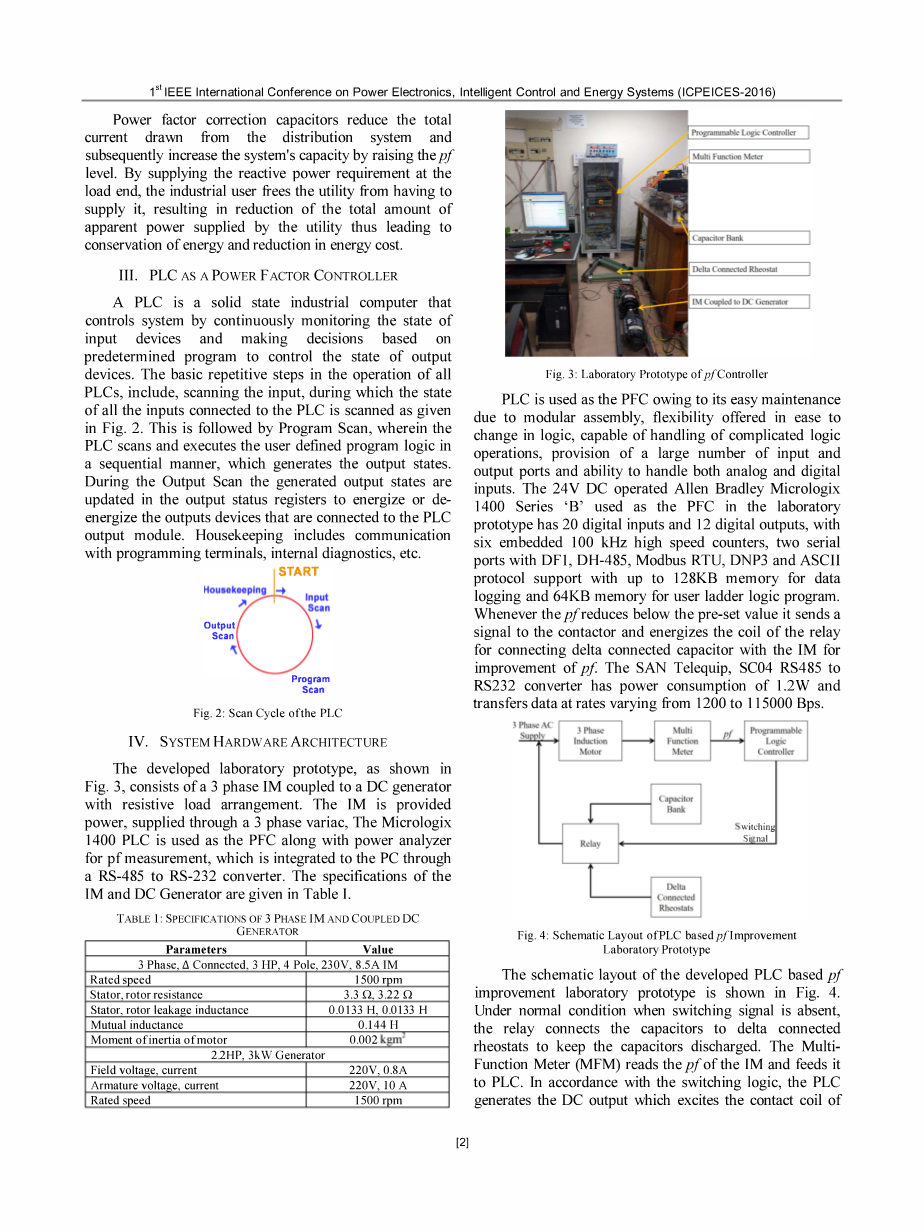
如图3所示,开发的实验室原型由耦合到具有电阻负载布置的直流发电机的三相异步电动机组成。其中三相自耦变压器为感应电动机提供电源,并采用Micrologix 1400 PLC作为功率因数控制器及测量功率因数的功率分析仪,其通过一个RS-485至RS-232的转换器集成到PC中。其中感应电动机和直流发电机的规格见表1。
表1:三相异步电动机及耦合直流发电机规格
|
参数 |
参数值 |
|
三相,△(三角形)连接,3马力,电机级数4级,230V,8.5A,异步电动机 |
|
|
额定转速 |
1500转/分 |
|
定子、转子电阻 |
3.3Omega;、3.22Omega; |
|
定子、转子漏感 |
0.0133H、0.0133H |
|
互感 |
0.144H |
|
电机转动惯量 |
0.002kgm2 |
|
2.2马力、3KW直流发电机 |
|
|
励磁电压、电流 |
220V,0.8A |
|
电枢电压、电流 |
220V,10A |
|
额定转速 |
1500转/分 |
图3 功率因数控制器的实验室原型
PLC之所以能用做功率因数控制器的原因是它经过模块化组装易于维护、灵活易于改变逻辑,同时他能够处理复杂的逻辑操作,为用户提供了大量的输入和输出端口并具有处理模拟和数字输入的能力。在实验室原型中用作功率因数控制器的24V直流工作的Allen BradJey Micrologix 1400 B系列的PLC具有20个数字输入和12个数字输出接口、具有6个嵌入式100kHz高速计数器、两个支持DFI, DH-485,Modbus RTU ,DNP3和ASCII协议的串行端口、具有128KB的内存用于数据记录以及64KB提供给用户进行梯形逻辑程序编写的内存。每当功率因数低于预设值时,它会向接触器发送信号并给继电器的线圈供电,用来使三角形连接的电容器连接到感应电动机中,以此来改善功率因数。SAN Telequip,SC04 RS485-RS232转换器会有1.2W的功耗但数据传输速度可达到1200-115000bps。
图4 基于PLC的功率因数改进实验室原型示意图
开发的基于PLC的功率因数改进实验室原型示意图如图4所示。在正常情况下,当没有开关信号时,继电器将电容器连接到三角形连接的变阻器中,以保持电容器放电。此时多功能仪表(MFM)会读取感应电动机的功率因数并将其提供给PLC。根据开关逻辑,PLC将产生激励继电器接触线圈的直流输出,从而通过感应电动机的输入端连接三角形连接的电容器。而单极双掷机械继电器则用来将电容器切换到电路中。切换程序进行功率因数改善仅仅在输入相位电压大于220V时开始,因此必须确保系统在额定电压下运行。系统的连接示意图如图5所示。
图5 系统连接示意图
5 用于改进功率因数电容值的确定
改善功率因数所需的电容器的值可通过考虑下图6中给出的感应电动机的每相电路来确定,并使用滑移的边界值来确定功率因数的理想范围。本次开发的实验室样机使用的功率因数范围为0.93-1。在图6中,所有符号均有其意义,即 为相位电压、 为定子电阻、 为定子漏抗、 为励磁电抗、 为转子电阻、 为转子漏抗、s为感应电动机的滑差。电动机的稳定工作区域较小,位于 (此时对应于最大转矩)和s=0之间,如图7所示。
图6 感应电动机的每相等效电路
图7 转矩滑差特性
图6所示的等效电路用于解决在滑差的边界值内,即s=0和s= 范围内的电容器值。并使用等效的戴维南模型来估算最大转矩下滑差的近似表达式,等效的戴维南模型如图8所示:
图8 等效戴维南模型
最大扭矩时的滑差为:
(1)
(2)
(3)
为了将功率因数保持在0.93-1.0的期望范围内,此处使用功率因数角Phi;和每相等效电路中的等效电阻 和等效电抗 之间的关系来确定电路中应切换的电容值。Phi;、、之间的关系如下:
(4)
对于负载和空载条件,电容器的值对应于滑差s,使得 。而感应电动机的滑差取决于负载条件。因此不同的电容器值被评估并切换到电路中改善电机的功率因数。
开发的梯形图逻辑程序用于控制PLC并获得所需切换到电路中的电容器,程序将在附录中给出。
6 结果与讨论
通过实验确定了感应电动机的满载滑差,并且将在空载和满载条件下获得的电容值列于表2中。在没有任何补偿电容器的情况下,感应电动机的空载电流为7.9A,滞后功率因数为0.14.为了将空载情况下的功率因数从0.14提高到0.93,需要转换入电路中的电容器值为60Mu;f,这与计算范围基本一致。
表2:实验得到的电机在空载和满载情况下运行时的电容值
|
滑差 |
功率因数范围 |
电容值范围(mu;F) |
|
|
0.93-1.0 |
87-154 |
|
0 |
0.93-1.0 |
62-64 |
将单相阻抗负载连接到发电机的输出端子,其将于感应电动机耦合连接。而随着耦合到感应电动机上的电阻负载逐渐增大,功率因数控制器将根据功率因数期望范围内的最佳值切换适当的电容器,得到的结果如表3所示。而不使用开发算法的情况下功率因数的变化在表4给出。由表对比可观察到空载功率因数从0.15提高到了0.3,同时线电流显著减小。
表3 使用控制器时不同负载下电机的功率因数
|
相电压(V) |
负载开关位置 |
线电流(A) |
补偿的功率因数 |
|
230 |
0(空载) |
3.95 |
0.3 |
|
1 |
4.35 |
0.54 |
|
|
2 |
4.3 |
0.54 |
|
|
3 |
4.8 |
0.67 |
|
|
4 |
5.2 |
0.68 |
|
|
5 |
5.3 |
0.68 |
表4 不使用控制器时不同负载下电机的功率因数
lt;
全文共15598字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[145113],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
相电压(V) |
负载开关位置 |
线电流(A) |
无补偿的功率因数 |
|
230 |
0(空载) |
7.95 |
0.15 |
|
1 |
8.05 |
0.30 |
|
|
2 |
8.15 |
0.28 |
|
|
3 |
8.30 |
0.4 |
|
|
4 |
8.45 |
0.4 |
|
|
5 |
8.5 |
0.4 |

