英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
一种具有RP-(2-RRU/1-RUU)结构的五自由度串并联机器人的动力学分析
摘要
提出了一种具有RP-(2-RRU/1-RUU)结构的五自由度串并联机器人。该机械手用于自动化生产线,完成物料的上、下、下料。为了保证安全高效的生产,该机械手具有良好的刚度和精度,适用于快速操作。基于上述要求,该机械手具有串行机构的大工作空间特性和并联机构的高精度和高刚度特性。然而,其动力学分析的难度越来越大。本文利用有限元分析软件对机械手进行了模态分析和谐波响应分析,得到了机械手的动态特性。基于牛顿-欧拉法进行了逆动力学建模。进行了动力学仿真,验证了动力学建模的正确性。该研究对弹道规划与控制系统的设计具有重要意义。
关键词:串并联原理;动力学;牛顿-欧拉方法
- 介绍
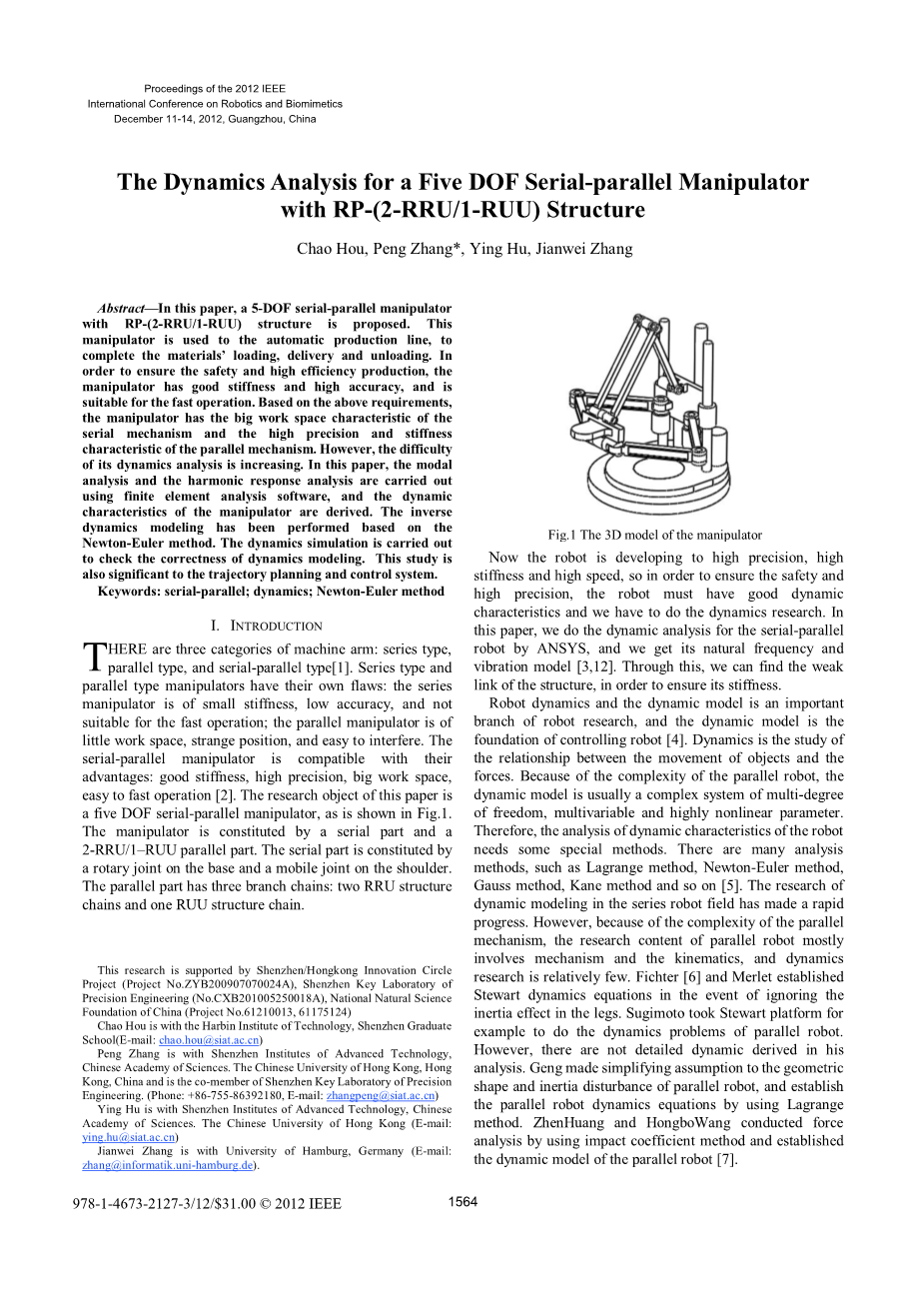
这里有三种类型的机械臂:串联型、并联型和串并联型[1]。串联式和并联式机械手各有缺点:串联式机械手刚度小,精度低,不适合快速操作;该并联机构工作空间小,位置奇怪,易受干扰。串并联机械手具有刚度好、精度高、工作空间大、操作方便、速度快等优点[2]。本文的研究对象是一个五自由度的串并联机器人,如图1所示。机械手由串行部分和2-RRU/ 1-RUU并联部分组成。该系列部件由底座上的旋转接头和肩膀上的移动接头组成。并联部分有三个支链:两个RRU结构链和一个RUU结构链。
图1机械手的三维模型
目前该机器人正朝着高精度、高刚度、高速度的方向发展,为了保证机器人的安全性和高精度,必须对其进行动态特性的研究。本文利用ANSYS软件对串并联机器人进行了动力学分析,得到了其固有频率和振动模型[3,12]。通过这个,我们可以找到结构的薄弱环节,从而保证其刚度。
机器人动力学和动力学模型是机器人研究的一个重要分支,而动力学模型是控制机器人的基础[4]。动力学是研究物体运动和力之间的关系。由于并联机器人的复杂性,其动力学模型通常是一个多自由度、多变量、高度非线性的复杂系统。因此,对机器人动态特性的分析需要一些特殊的方法。分析方法有拉格朗日法、牛顿-欧拉法、高斯法、凯恩法等[5]。系列机器人领域的动态建模研究取得了长足的进展。但由于并联机构的复杂性,并联机器人的研究内容大多涉及机构和运动学,动力学研究相对较少。Fichter和Merlet在忽略腿部惯性效应的情况下建立了Stewart动力学方程[6]。杉本博司以Stewart平台为例,研究了并联机器人的动力学问题。然而,在他的分析中没有详细的动态推导。耿对并联机器人的几何形状和惯性扰动进行了简化假设,并利用拉格朗日方法建立了并联机器人动力学方程。ZhenHuang和HongboWang采用冲击系数法进行受力分析,建立了并联机器人的动力学模型[7]。
本文首先对弹性动力学分析进行了研究,利用有限元分析软件进行了模态分析和谐波响应分析,得出了机械手的动态特性。其次,利用牛顿-欧拉方法进行了逆动力学建模。最后在MATLAB软件中进行了动力学仿真,验证了动力学建模的正确性。
- 动态特性研究
为了保证机器人的刚度好、精度高、速度快,必须具有良好的动态特性。在本节中,我们将使用ANSYS对进行动态特性研究。通过分析结果,找出机器人的薄弱环节,并加以改进[8]。
2.1.动态特性分析理论
根据机械振动的基本理论,N自由度线性系统的运动微分方程为:
[M]{u} [C]{u} [K]{u}={F(t)} (1)
其中,[M], [C], [K]分别是质量矩阵、阻尼矩阵和刚度矩阵,{u}是位移响应向量,F (t)是激励向量。
模态分析用于确定机器人的振动特性,是谐波响应分析的基础。固有频率和振型是模态分析的结果。对于较小的结构阻尼,可以忽略阻尼:
[M]{u} [K]{u}=0 (2)
式(2)的解为:
{u}rsquo;={u}cos(wt beta;) (3)
这里w是简单的谐波振动频率,t是时间变量,beta;是初始阶段。将(3)代入(2),得到特征值和特征向量;它们分别对应于固有频率和主振型。
谐波响应分析确定了结构在已知频率谐波荷载下的响应。它可以保证机器人能够承受各种频率的负载并检测出共振响应,从而避免共振。(1)的特征解反映了输入负载的特征[9]。
2.2.建立有限元模型
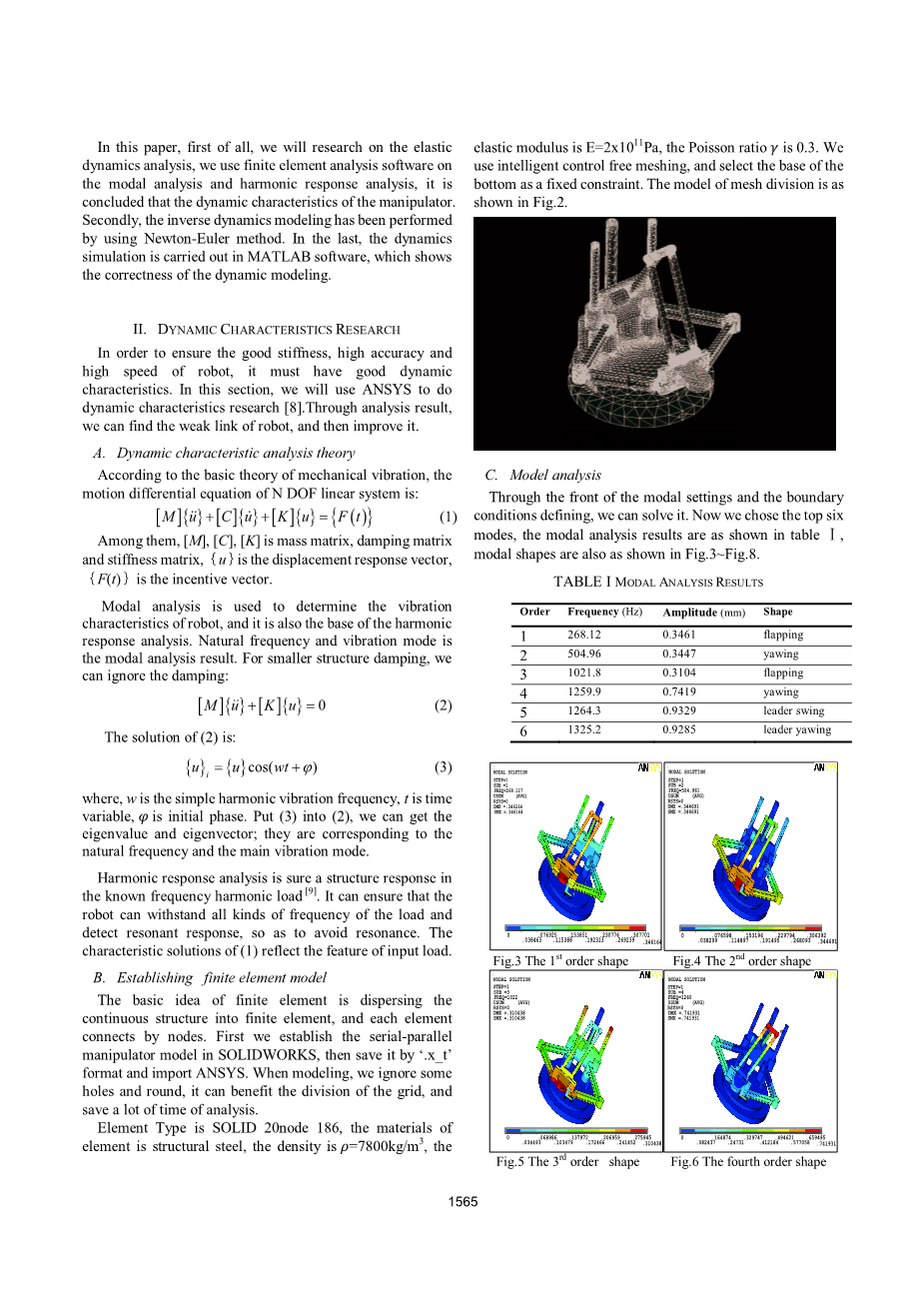
有限元的基本思想是将连续结构离散成有限单元,每个单元通过节点进行连接。首先在SOLIDWORKS中建立了串并联机器人模型,然后将其保存为。x_t格式并导入ANSYS。在建模时,我们忽略了一些孔和圆,它有利于网格的划分,并节省了大量的分析时间。
元素类型是SOLID 20node 186,元素的材料是钢结构,密度是= 7800公斤/立方米,E = 2 x1011pa弹性模量,泊松比㼿是0.3。我们使用智能控制自由网格,并选择底部的底部作为一个固定的约束。网格划分模型如图2所示
图2网格划分模型
2.3.模型分析
通过前面的模态设置和边界条件的定义来求解。现在我们选择了六大模式,模态分析结果如下表1所示,模态形状也如图3到图8所示。
哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈哈哈哈哈或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈哈哈哈哈或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈哈哈哈哈或或或或或或或或或或或或或或或或或或或或或或或或或或或或或或哈哈哈哈哈哈哈哈哈哈或或或或或或或或或或或或或
表一模态分析结果
图3一阶形状 图4二阶形状
图5三阶形状 图6四阶形状
图7五阶形状 图8六阶形状
通过以上分析可以发现,移动平台的变形位移最大,移动平台与杆件之间的接头是薄弱环节,因此在设计和制造中要注意,以保证其刚度。
D.谐波响应分析
通过模型分析可知,移动平台的变形位移最大,因此我们对移动平台上的节点M施加振动力。振动力的幅值为10n,频率范围为200hz ~ 1500hz,分15个步骤进行谐波响应分析。然后得到节点M的幅频曲线,如图9~图11所示。横坐标为频率,纵坐标为响应位移。
我们可以发现,在200hz到400Hz之间的XYZ三个方向上,节点M的振幅较大,并且响应位移突变,所以可能会在300hz左右产生共振,我们应该让机器人避免这种情况。
图9 X方向曲线 图10 Y方向曲线
图11 Z向曲线
3.逆动力学建模
综合考虑一些经典的动力学建模方法,我们使用牛顿-欧拉方法来做[10]。
3.1.2RRU链动力学建模
建立2RRU链的坐标系统,力的方向B1A1和B2A2垂直于驱动棒,如图12所示。
图12 2RRU链条受力分析
我们可以得到欧拉方程:
其中r1c、r3c为惯性力矢量,设F21xy的单位矢量为l1,幅值为f1;F43xy的单位向量是l2,大小是f3,所以我们可以得到:
根据杆件A1P1和A2P2的受力分析,可以得到以下方程:
杆状体p1p2n受力分析如图所示。根据第二定律,我们得到:
根据(8)(9)(10)可以得到:
将(12)(13)代入(11)得:
3.2. RUU链动力学建模
建立RUU链的坐标系,平行四边形连杆相当于一个活动关节。根据螺旋理论,作用在平台上的力为平行四边形平面,垂直于平行四边形短杆,一个力垂直于驾驶员,另一个力在平行四边形平面上,如图13所示。
图13 RUU链条受力分析
根据牛顿第二定律,我们得到:
根据对A3B3的受力分析,可以得到欧拉方程:
其中I6为连杆到点B3的转动惯量,r6g为重心的半径矢量,r6c为惯性力的半径矢量,m3为驾驶员的输出转矩。我们知道F76垂直于A3B3,假设它的大小是f3,向量是l3,所以我们可以得到:
把(15)和(17)放在一起,我们可以得到:
3.3移动平台动力学建模
可移动平台P受力分析如图14所示。由于移动平台在XY平面上有两个移动自由度和一个旋转自由度,所以我们只显示与自由有关的力和力矩,而忽略了约束反应。根据牛顿-欧拉方程,在XY平面上得到:
其中mp为移动平台总质量,rpc为重心到坐标原点的位置矢量,r为坐标原点到F7p工作点的半径矢量。将(19)、(20)放在一起,得到RUU链条电机的驱动力矩:
将式(10)、式(14)、式(18)代入式(19),得到2RRU链条电动机的驱动力矩:
其中,
图14可移动平台P受力分析
3.3系列零件动力学建模
该系列部件由底座上的旋转接头和肩膀上的移动接头组成。我们将并联机构视为整个分析过程的一部分,如图15所示。根据牛顿-欧拉方程,可得:
所以我们可以得到Z方向的驱动力:
旋转接头受力分析如图15所示,根据欧拉方程可得:
从而得到旋转接头电机的驱动力矩:
图15串联部分受力分析
在本节中,我们推导出每个电机的驱动转矩,为了检验其正确性,接下来我们将在MATLAB软件中对其进行仿真[11]。
- 动力学仿真
这个串并联机器人的模型框架参数如表所示
表二模型参数
在本节中,我们将给出基于牛顿-欧拉方程的动态模型的逆解,当我们假设在可用的工作空间中移动平台的某些运动时,求解5个执行器的驱动力。首先,让我们模拟并行部分,为了确认动态模型,移动平台在XY平面上移动,和末端执行器在x = 0, y = 0.6,假设移动平台的最大加速度是1 m / s2,最大速度为0.5米/秒,最大角加速度是1 rad / s2,最大角速度是0.5 rad / s。在不同的速度和加速度,相应的驱动力是不同的,模拟的结果是显示在表㼿,我们可以发现,2RUU的驱动力级别是相同的,当末端执行器是Y轴移动。这将检查建模
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239830],资料为PDF文档或Word文档,PDF文档可免费转换为Word

