英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
2011年IEEE机器人与自动化国际会议
上海国际会议中心
2011年5月9日至13日,中国上海
德国宇航中心浮动弹簧关节:
基于能量的变刚度关节设计
塞巴斯蒂安·沃尔夫,奥利弗·艾伯格和格德·海辛格,
德国航空航天中心
机器人与机电一体化研究所
罗伯特博世,斯图加特,德国
摘要:将机械兼容关节引入机器人是全世界兴趣关注的焦点,尤其是在仿人机器人领域。变刚度关节(VSJ:Variable Stiffness Joints)有望获得一个高性能和鲁棒性的机器人系统。德国宇航中心(DLR)所提出的浮动弹簧关节(FSJ:Variable Stiffness Joints)是一个变刚度关节模块,设计用于拟人DLR手臂系统的前四个轴。DLR手臂系统旨在可以相比人天生手臂的功能。为此,关节必须非常紧密才能与手臂相配合。同时,为了接近人类的手臂技能,它们需要高功率密度。新的DLR浮动弹簧接头完全是从能源的角度设计的。这不仅解决了节能元件和低摩擦设计的问题,而且还尽可能地利用了弹簧的势能。通过对臂尖钝性冲击的研究,证明了机器人系统的鲁棒性。
引言
机械兼容的关节呈现出的关键特征是建立低能耗重量轻的机器人,该机器人能够适应其工作环境。此外,在短期内存储势能的可能有利于扩展机器人的性能,例如最大峰值速度[1], [2]。机械顺应性由于其对外力的高带宽反应,降低了对控制带宽的要求,因为外力由于与环境的接触而缓慢增加。同样,对于更高级别的控制,软机器人关节也具有优势。它们减少了对精确轨迹规划的需求,从而避免了刚性触点过载,损坏物体或故意松动触点的情况。
具有机械弹簧的人形机器人已经发展了近20年,其灵活性和性能都在不断提高。它们可以分为两种类型:具有连续弹性关节(SEA)且具有不变弹簧特性的机器人,例如DOMO[3]。日本的机器人the Twendyone(http://twendyone.com),美国宇航局的机器人R2(http://robonaut.jsc.nasa.gov),或者下一代的iCup(http://www.icub.org/)还有那些具有可变刚度关节(VSJ)的机器人,如早稻田机器人温迪[4]。连续弹性关节(SEA)在每个关节中只有一个执行器,这导致关节不太复杂,而且很可能是更轻和更小,但缺点是关节的刚度和固有频率无法适应不同的任务。
图1 DLR的新集成手臂系统
最新开发的变刚度关节VSJ原型计划在DLR的集成手臂系统中运行[5]-[7],见图1。DLR手部手臂系统旨在尽可能接近普通人手臂的灵活性和功能。提出的关节原型旨在用作手臂的模块化基础。 关节原型的非线性可变弹簧机构用于轴1-4。
设计目标
在手臂系统的前四个关节(肩肘)中应用浮动弹簧关节,对浮动弹簧关节FSJ提出了许多要求:
- 极其紧凑以适合手臂;
- 高度集成,形成关节模块,包括关节电机、传感器、机械装置以及关节轴承本身;
- 手臂的重量很难达到目标[8]。 因此关节模块必须尽可能轻;
- 为了与人类手臂的性能竞争[9],关节的主动平衡速度应高于500◦/s,同时不以降低最大扭矩来达到该目标,合理的最大扭矩约为60 N·m[10],[11]。人体手臂关节水平最大刚度仍在研究中,是一个有争议的话题。一些迹象表明,在肘部的关节水平上,该值约为350Nm/rad[12];
- 为了实现准确的定位以及鲁棒的可预测的动力学,机器人手臂应具有坚固的结构和高分辨率的位置传感器;
- 设计过程中的一个重要目标是保持尽可能低的摩擦;
- 应用绝对位置传感器,以测量完整的关节状态。
这项工作部分由欧洲联盟委员会第六和第七个框架方案提供资金,作为第011838号赠款下的SMERobotTM项目、第045359号赠款下的PHRIENDS项目和第231554号赠款下的VIACTORS项目的一部分。
能源设计
DLR浮动弹簧关节(FSJ)的布局是从能量的角度出发的。在弹性关节中,动能储存在连接的连杆和关节马达中。由于重力作用,势能储存在弹性元件和连杆中。在手臂运动期间,能量会在动能和势能之间反复转换。因此,能量必须得到有效转化。重要的是,势能的总量要与预期的任务和产生的动力很好地平衡。
首先,这意味着我们应将摩擦保持在尽可能低的水平,以便在操作过程中不会失去能量。因此我们必须避免轴承摩擦,并减少轴承的总数。其次,我们需要高效的电机和齿轮,这些电机和齿轮还具有较高的峰值能量通过量。因此我们使用机械传动马达和谐波传动齿轮。最后,变刚度关节(VSJ)的性能主要取决于弹簧机构的设计。该机构的设计目的是有效地利用单个机械弹簧的弹簧能量,以产生所需的扭矩,并减少由于预紧引起的损失,从而改变关节刚度。
A.关节力学
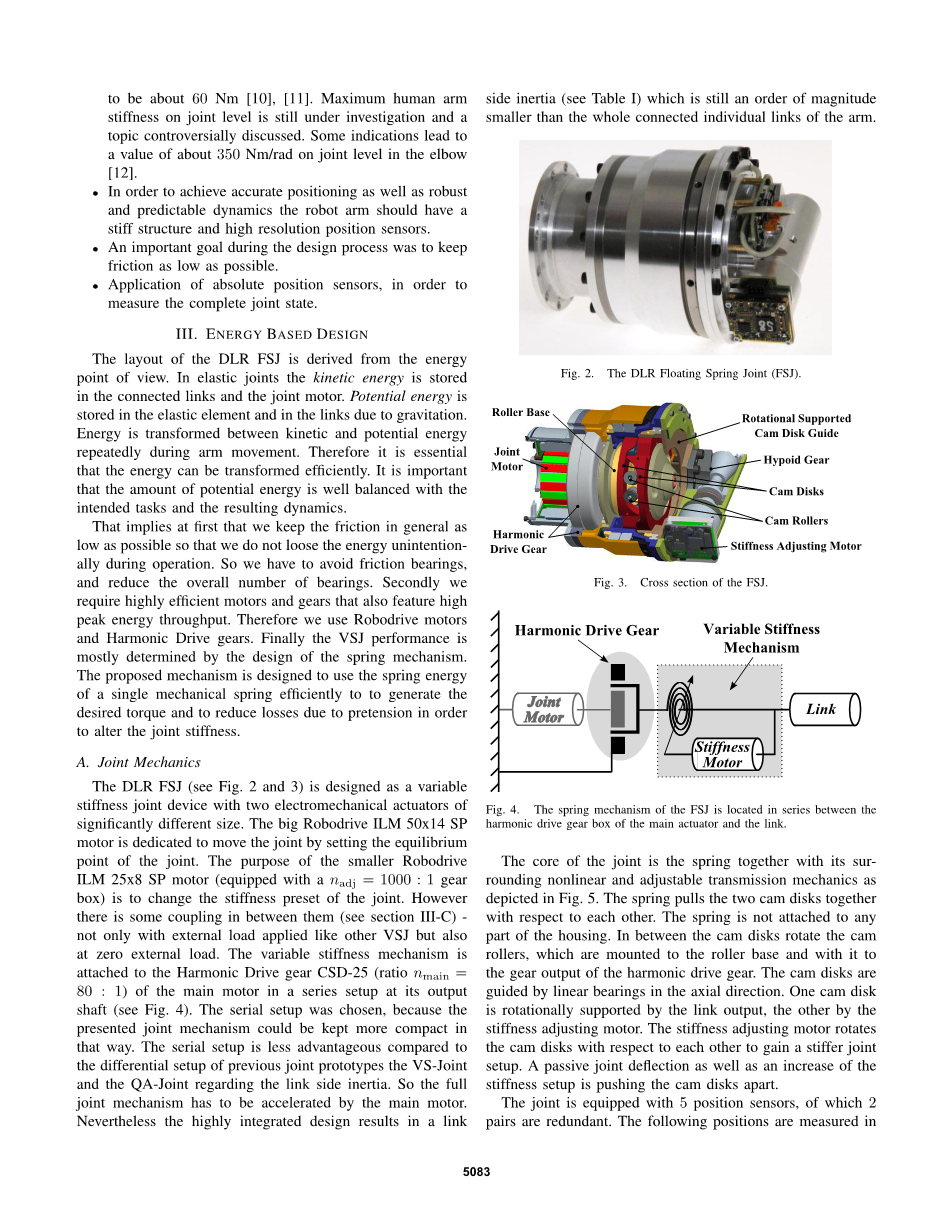
DLR浮动弹簧关节(见图2和图3)设计为具有两个大小明显不同的机电执行器的可变刚度连接装置。大型机械电机 ILM 50x14 SP电机通过设置关节的平衡点来移动关节。较小的机械电机 ILM 25x8 SP电机(配备nadj = 1000:1齿轮箱)的目的是更改关节的预设刚度。但是,它们之间存在一些耦合(请参阅三-C节),不仅像其他变刚度关节VSJ一样施加外部负载,而且在外部负载为零时也是如此。可变刚度机构以串联方式安装在主电动机的谐波驱动齿轮CSD-25(比率nmain = 80:1)上,并位于其输出轴上(见图4)。之所以选择串行设置,是因为这样可以使所提出的关节机构保持更紧凑,与先前关节原型(VS关节和QA关节)的差分设置相比,串行设置在链路侧惯性方面的优势较小。因此,必须通过主电动机来加速完整的关节机构。然而,高度集成的设计导致连杆侧惯性(请参阅表1),该惯性仍比臂的整个连接的单个连杆小一个数量级。
图2 DLR浮动弹簧关节(FSJ)
图3 FSJ的横截面结构展示
图4 FSJ的弹簧机构串联在主执行器的谐波传动齿轮箱和连杆之间。
关节的核心是弹簧及其周围的非线性和可调节的传动机构,如图5所示。弹簧将两个凸轮盘彼此相对拉动。弹簧未连接到外壳的任何部分。在两个凸轮盘之间旋转凸轮滚轮,这些凸轮滚轮安装在滚轮底座上,并与之一起安装在谐波传动齿轮的齿轮输出上。凸轮盘由线性轴承在轴向上引导。一个凸轮盘由连杆输出可旋转地支撑,另一个由刚度调节电机支撑。刚度调节马达使凸轮盘彼此相对旋转,以获得更硬的关节设置。被动关节偏转以及刚度设置的增加将凸轮盘推开。
表1 关节性能
|
最大扭矩 |
plusmn;67 Nm |
|
最大刚度 |
826 Nm / rad |
|
最大挠度 |
plusmn;15◦ |
|
最大能量储存量 |
5.3 J |
|
标称输入功率 |
480 134 = 614 W |
|
最高速度 |
8.5 rad / s |
|
最小刚度调整时间 |
0.33 s |
|
直径 |
92mm |
|
长度 |
119mm |
|
重量(包括马达) |
1.41公斤 |
|
链节侧惯量 |
6.51times;10minus;4 kgm2 |
图5 FSJ机制
被动的关节偏转导致两个凸轮盘相对于凸轮滚子沿着旋转轴旋转运动。凸轮辊被两个凸轮盘包围。凸轮盘被弹簧轴向拉到一起,并由线性轴承(未显示)旋转支撑。凸轮盘能够在线性轴承的引导下沿轴向移动。
关节配有5个位置传感器,其中2对是冗余的。在关节中测量以下位置(有关关节设置的概述,请参见图4):
- 关节电机轴qM1
- 刚度调节电机轴qM2
- 链接位置与关节基准点q(绝对值)
- 可调的凸轮盘位置与连杆侧的qadj(绝对值)
- 凸轮滚轮与连杆侧qflex(绝对值)
这三个绝对位置允许直接在系统启动时完全识别关节状态。
值得一提的是,与DLR之前开发的机器人相比,这款DLR手臂系统中没有扭矩传感器。浮动弹簧关节FSJ关节扭矩是根据关节模型从位置传感器信号计算得出的。该方法在可变刚度关节VS-Joint [1],[6]中被证实具有良好的性能,并且由于力学结构的密切相关,假设具有相似的操作性能。
B.浮动弹簧
DLR 浮动弹簧关节FSJ的机械原理(参见图6)是DLR之前开发的两个关节原型的衍生产品,即VS-Joint [1]和QA-Joint [2]。像在VS-Joint中一样,扭矩是由旋转的凸轮盘和滚子系统产生的,该系统将旋转接头的挠度传递给线性弹簧的轴向压缩。 凸轮盘的形状可以根据所需的扭矩与位移特性进行选择。与VS-Joint的机械手相比,浮动弹簧关节FSJ的新机械手不配备单个凸轮系统,而是配备两个相对的凸轮轮廓。这源于QA-Joint,其中两个凸轮系统通过叠加两个单独的扭矩来生成输出轴的扭矩。在经典的对抗系统[14]-[18]以及QA-Joint中,两个弹簧元件用于生成两个扭矩,这些扭矩相加得出输出扭矩。通过给弹簧元件施加预载来改变刚度的可变刚度关节[19], [20]通常只有一个。 但是,具有两个相对的弹簧机构的VSJ在刚度范围内具有一些优势(请参阅第III-C至E节)。
为了获得良好的关节性能(高扭矩,大刚度范围,高能量承受能力),弹簧必须能够存储尽可能多的能量。具有高能量容量的弹簧元件往往笨重且大多较重。因此,大多数现有变刚度关节VSJ的弹簧元件在尺寸和重量方面是决定机械性能的主要因素,尤其是如果将悬架和嵌入弹簧元件的结构算在内的话。这与紧凑,轻便和低摩擦的设计目标相矛盾。为了从两个相对的弹簧机构中受益,但保持紧凑的设计,我们设计了一种机制,其作用类似于两个相对的弹簧生成机构,但仅使用一个弹簧。
浮动弹簧关节FSJ的两个凸轮盘通过单个浮动弹簧相互连接,这意味着该弹簧与关节底座或输出轴没有连接。弹簧在两个凸轮盘之间形成直接连接,并将它们轴向拉在一起。在凸轮盘之间有一对凸轮滚子,它们直接安装在谐波驱动齿轮的齿轮输出轴上,并由轴承轴向和径向地引导。因此,弹簧仅通过凸轮盘相对于彼此而不是相对于壳体的轴向运动而移位。弹簧产生的力以不同的方向施加到两个凸轮盘上,因此同时产生两个相反的扭矩。浮动弹簧机构使我们可以在紧凑的空间中使用高能弹簧。
C. 关节模型
如前所述,浮动弹簧关节FSJ的弹簧机构与主执行器串联。 以qM1为主电机的转子位置,齿轮输出位置为
theta;1 = minus;nmain qM1 = minus;qM1 (1)
刚度调节电机的齿轮输出位置由qadj冗余测量,为
theta;2 = qadj = nadj qM2 =qM2 (2)
并设置两个凸轮盘之间的相对位置差。刚度设置的状态为:
sigma; =theta;2 (3)
关节的平衡位置ε,即没有施加外部负载的关节位置,取决于两个电动机位置,如下所示:
ε = theta;1minus;sigma; = theta;1minus;theta;2 (4)
被动关节挠度Phi;为
Phi; = qflexminus;(εminus; theta;1) (5)
- 静止位置 b)被动偏转 c)刚性设置 d)刚性设置中的挠度
图6 平面视图中的FSJ机制原理
凸轮滚子连接至主执行器齿轮箱(谐波传动)的齿轮输出轴。一个凸轮盘固定在连杆侧,第二个凸轮盘固定在刚度致动器上。在a)中,机械装置以弹簧长度x描绘在静止位置;在b)中,外部扭矩施加到关节上并导致被动挠度;c)是刚性关节预设中的平衡位置,在该位置上,上凸轮盘通过刚度调节器相对于下凸轮盘旋转至角度 2;d)描绘了在施加外部负载的情况下处于刚性预设状态的系统。
D.获得刚度的原理
机构的渐进输出扭矩源自渐进凸
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239039],资料为PDF文档或Word文档,PDF文档可免费转换为Word

